Transferir como PDF, PPTX


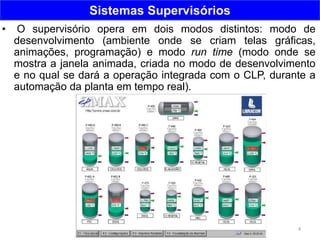
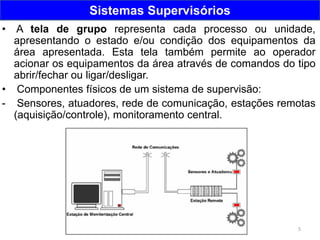





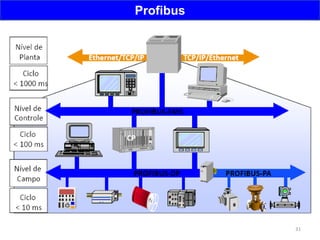
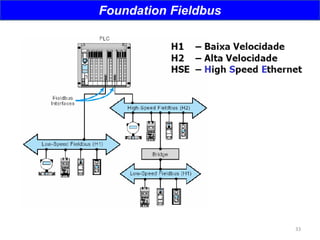
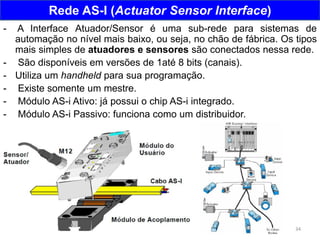

O documento discute sistemas supervisórios e protocolos de comunicação industriais. Ele descreve os principais tipos de sistemas supervisórios como SCADA e SDCD, e seus componentes e funções. Também explica diferentes protocolos de comunicação industrial como Modbus, HART, DeviceNet, Profibus e Fieldbus, e como eles são usados para integrar dispositivos, sensores e redes em sistemas de automação industrial.















































