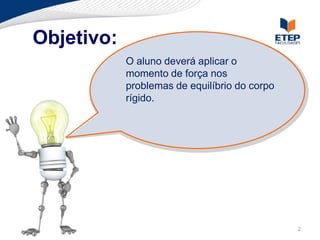
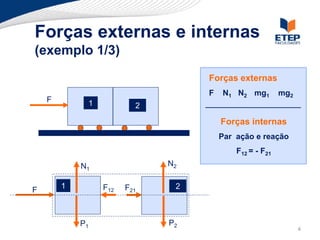
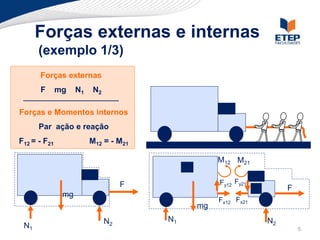
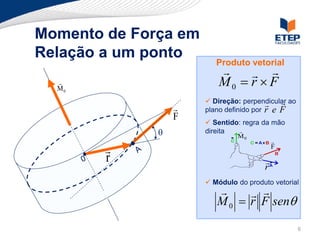
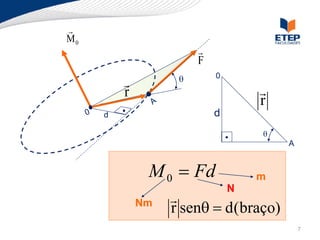
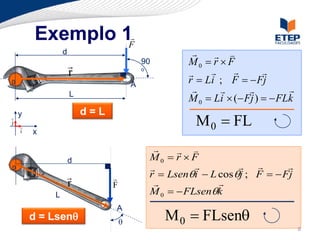
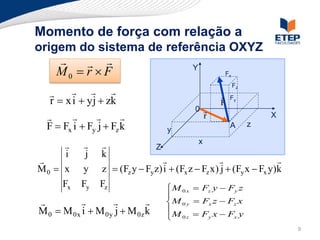
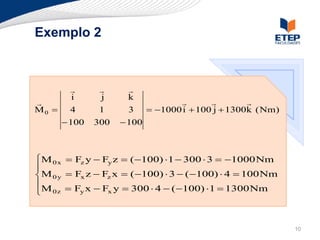
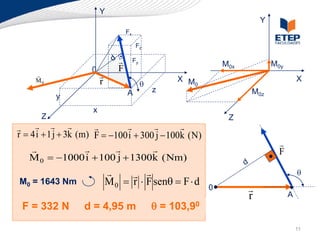
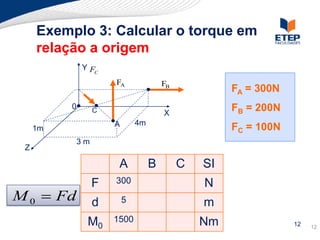
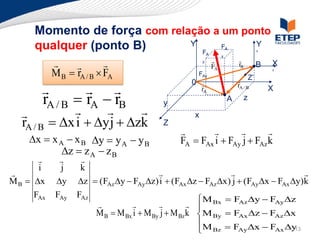
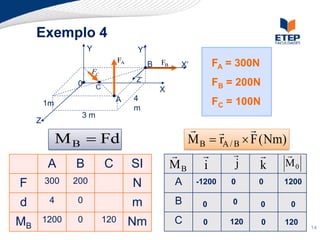
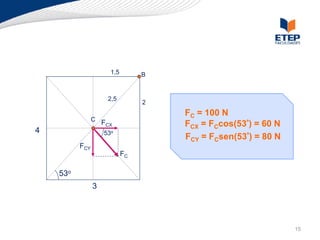
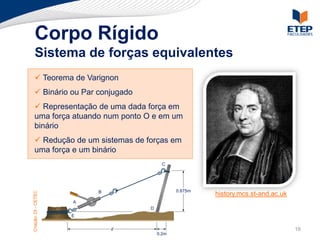
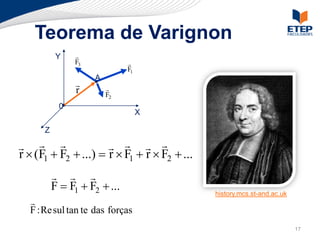
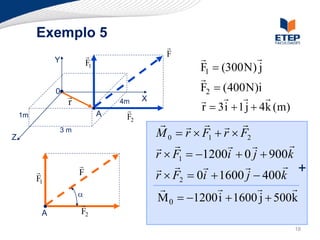
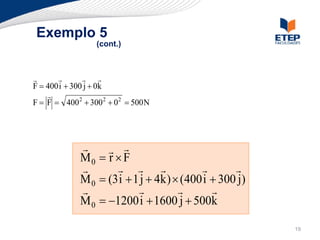
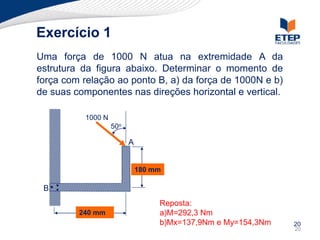
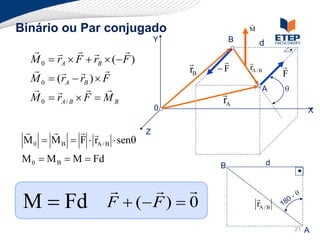
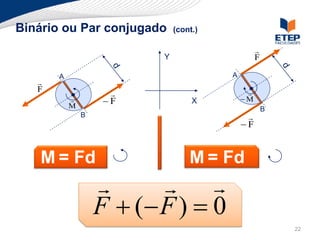
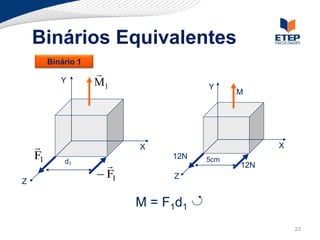
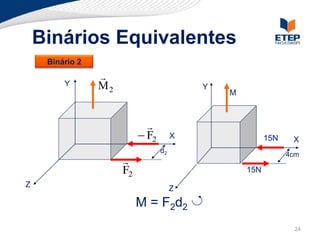
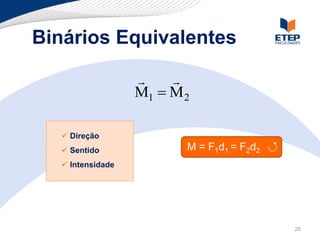
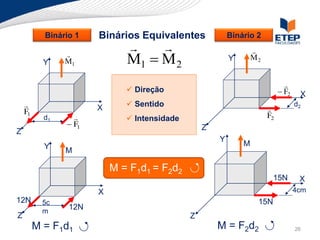
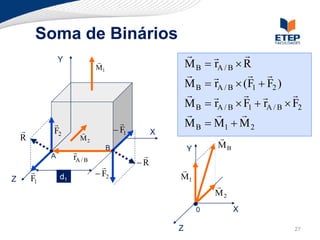
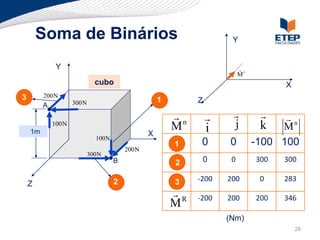
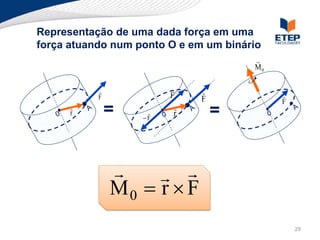
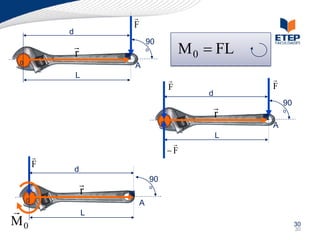
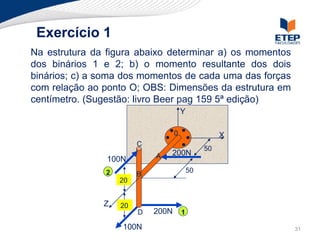
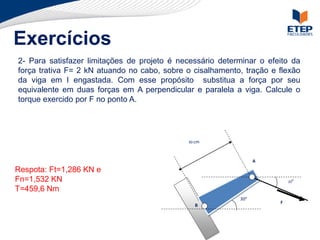
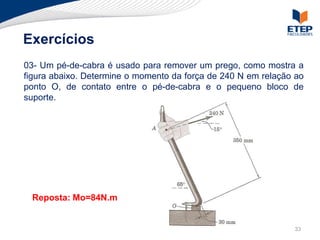
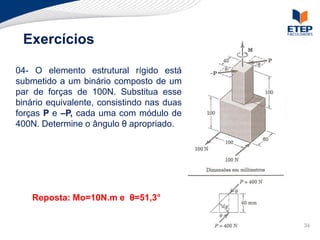
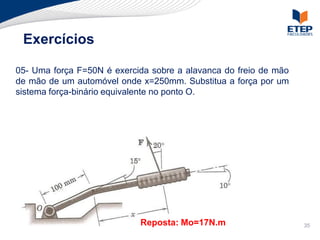
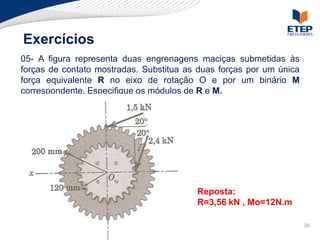
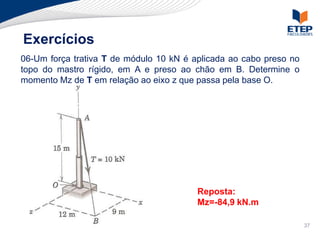
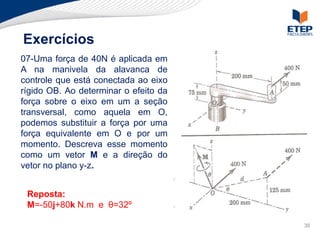
O documento apresenta os conceitos de momento de força e suas aplicações em problemas de equilíbrio de corpos rígidos. É definido o momento de força em relação a um ponto e mostrado como calcular o momento resultante a partir das forças aplicadas a um sistema. Exemplos ilustram o cálculo do momento de força em diferentes situações.