Baixar para ler offline
. Uma tradu¸˜o
e a ca
da ultima edi¸˜o ´ dispon´
´ ca e ıvel (Ma60). Discuss˜es interessantes tamb´m s˜o proporcionadas por R. B. Lindsay e H.
o e a
Margeneau (Li36) e N. Feather (Fe59).
47](https://image.slidesharecdn.com/leisdenewtondamecanica-100730120243-phpapp01/85/Leis-de-newton-da-mecanica-1-320.jpg)
. Uma tradu¸˜o
e a ca
da ultima edi¸˜o ´ dispon´
´ ca e ıvel (Ma60). Discuss˜es interessantes tamb´m s˜o proporcionadas por R. B. Lindsay e H.
o e a
Margeneau (Li36) e N. Feather (Fe59).
47](https://image.slidesharecdn.com/leisdenewtondamecanica-100730120243-phpapp01/75/Leis-de-newton-da-mecanica-1-2048.jpg)
. Anteriormente,
a
Galileo (1564-1642) generalizou os resultados dos seus pr´prios experimentos matem´ticos com suposi¸˜es equiva-
o a co
lentes a Primeira e Segunda Leis de Newton. Mas Galileu n˜o forneceu uma descri¸˜o completa da dinˆmica porque
a ca a
ele n˜o conhecia o significado da terceira Lei de Newton - e portanto faltou determinar preciamente o significado de
a
for¸a
c
† Senhor Arthur Eddington (Ed30, p. 124).
‡ O presente racioc´
ınio aqui, a saber, a Primeira e Segunda Leis s˜o realmente defini¸˜es e a Terceira Lei cont´m
a co e
a F´ısica, esta n˜o ´ a unica interpreta¸˜o poss´
a e ´ ca ıvel. Lindsay and Margenau (Li36), por exemplo, apresentam que as
duas primeira Leis s˜o Leis F´
a ˜
ısicas e entAo derivam a Terceira Lei como uma conseq¨ˆncia.
ue
Projeto AIUTA – Mecˆnica Cl´ssica I
a a (UNIFRA–2004)](https://image.slidesharecdn.com/leisdenewtondamecanica-100730120243-phpapp01/85/Leis-de-newton-da-mecanica-2-320.jpg)












![62 --- 2 / MECANICA NEWTONIANA – PART´
ˆ ´
ICULA UNICA
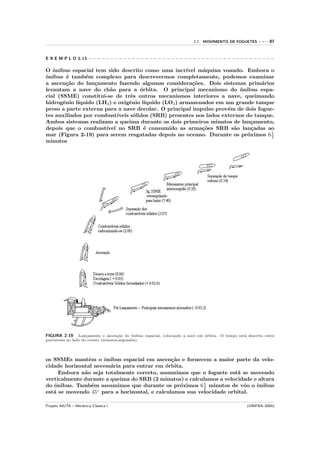
Vamos usar algum n´mero atual nestes c´lculos. Os alem˜es usaram uma arma de longo
u a a
alcance nomeada Grande Cabina na Primeira Guerra Mundial que bombardeou Paris. O m´ ıssel
chegou a uma velocidade de 1, 450m/s. Encontre o alcance previsto, a altura m´xima do proj´til,
a e
e o tempo de vˆo do proj´til se θ = 55◦ . Temos v0 = 1, 450m/s e θ = 55o , assim (da Equa¸˜o 2.39)
o e ca
o alcance torna-se
(1450m/s)2
R= [sin (110o )] = 202km
9.8m/s2
a Grande Cabina atual alcan¸a 120km . A diferen¸a ´ um resultado do efeito real da resistˆncia
c c e e
do ar.
Para encontrar a altura m´xima atingida, precisamos calcular y para o tempo T /2 onde T ´
a e
o tempo de vˆo do proj´til:
o e
(2)(1450m/s)(sin 55o )
T = = 242s
9.8m/s2
T −gT 2 v0 T
ymax t = = + sin θ
2 8 2
−(9.8m/s)(242s)2 (1450m/s)(242s) sin (55o )
= +
8 2
= 72km
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
E X E M P L O 2.7 − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − −
A seguir, adicionamos os efeitos da resistˆncia do ar no movimento do proj´til do
e e
exemplo anterior. Calcule o decrescimento do alcance deste supondo que a for¸a cau-
c
sada pela resistˆncia do ar seja diretamente proporcional ` velocidade do proj´til.
e a e
Solu¸˜o: As condi¸˜es iniciais s˜o as mesmas do exemplo anterior.
ca co a
x(t = 0) = 0 = y(t = 0)
x(t = 0) = v0 cos θ ≡ U
˙ (2.40)
y(t = 0) = v0 sin θ ≡ V
˙
Entretanto, as equa¸˜es do movimento, Equa¸˜o 2.31, torna-se
co ca
m¨ = −kmx
x ˙ (2.41)
m¨ = −kmy − mg
y ˙ (2.42)
A Equa¸˜o 2.41 ´ exatamente a mesma usada no Exemplo 2.4. A solu¸˜o ´, portanto
ca e ca e
U
x= (1 − e−kt ) (2.43)
k
Similarmente, a Equa¸˜o 2.42 ´ a mesma em rela¸˜o ` equa¸˜o do movimento no Exemplo 2.5.
ca e ca a ca
Projeto AIUTA – Mecˆnica Cl´ssica I
a a (UNIFRA–2004)](https://image.slidesharecdn.com/leisdenewtondamecanica-100730120243-phpapp01/85/Leis-de-newton-da-mecanica-16-320.jpg)














![2.6. ENERGIA --- 77
Por todo o s´culo XIX, cientistas realizaram experimentos sobre conserva¸˜o de energia,
e ca
resultando na importˆncia que ela tem atualmente. Hermann von Helmholtz (1821 - 1894) formulou
a
a lei geral da conserva¸˜o de energia em 1847. Baseado na conclus˜o do experimento calorim´trico
ca a e
de James Perscott Joule (1818 - 1889) que iniciou em 1840.
Considere uma part´ ıcula pontual sob influˆncia de uma for¸a conservativa com potencial U .
e c
A conserva¸˜o de energia (na realidade, energia mecˆnica, para ser exato neste caso) est´ refletida
ca a a
na Equa¸˜o 2.90.
ca
1
E = T + U = mv 2 + U (x) (2.96)
2
onde consideramos somente o caso unidimensional. Podemos reescrever a Equa¸˜o 2.96 como
ca
dx 2
v(t) = =± [E − U (x)] (2.97)
dt m
e integrando
x
±dx
t − t0 = (2.98)
2
x0
m [E − U (x)]
onde x = x0 e t = t0 . Temos formalmente a solu¸˜o para o caso unidimensional na Equa¸˜o 2.98;
ca ca
isto ´, encontramos x(t). Todo o restante ´ inserido no potencial U (x) da Equa¸˜o 2.98 e integrado,
e e ca
usando c´lculos num´ricos se necess´rio. Estudaremos mais adiante com alguns detalhes o potencial
a e a
1
U = 2 kx2 para oscila¸˜es harmˆnicas e U = −k/x para a for¸a gravitacional.
co o c
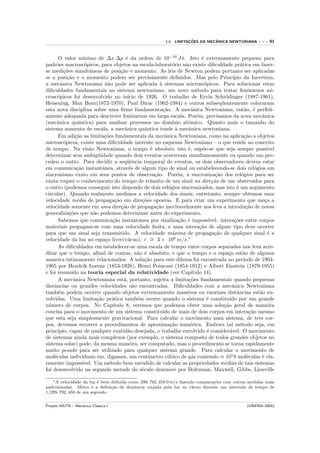
Podemos ter uma boa id´ia a respeito do movimento de uma unica part´
e ´ ıcula examinando o
gr´fico de um exemplo de U (x) conforme mostra a Figura 2-14. Primeiro, nota-se que, devido
a
a 1 mv 2 = T ≥ 0, E ≥ U (x), para algum movimento f´
2 ısico real. Vˆ-se na Figura 2-14 que o
e
movimento ´ ligado∗ para as energias E1 e E2 . Para E1 , o movimento ´ peri´dico, entre os pontos
e e o
de retorno xa e xb . Similarmente, para E2 o movimento tamb´m ´ peri´dico, por´m h´ duas
e e o e a
poss´ıveis regi˜es: xc ≤ x ≤ xd e xe ≤ x ≤ xf . A part´
o ıcula n˜o pode “saltar” de uma “cavidade”
a
para outra; uma vez numa cavidade, a part´ ıcula permanecer´ nela para sempre se a a sua energia
a
for sempre E2 . O movimento para uma part´ ıcula com energia E0 tem um unico valor, x = x0 . A
´
part´ıcula est´ em repouso com T = T0 [E0 = U (x0 )].
a
O movimento para a part´ ıcula de energia E3 ´ simples: a part´
e ıcula vem do infinito, p´ra a
em x = xg e retorna para o infinito–muito semelhante a uma bola de tˆnis arremessada contra
e
uma parede. Para a energia E4 , o movimento ´ n˜o-ligado e a part´
e a ıcula pode estar em qualquer
posi¸˜o. Sua velocidade mudar´ conforme se movimenta porque depende da diferen¸a entre E4
ca a c
e U (x). Se a part´ ıcula se move para a direita, sua velocidade aumentatar´ e dimunuir´ mas
a a
continuar´ movendo-se para o infinito.
a
O movimento da part´ ıcula E1 ´ semelhante ao de uma massa presa a uma mola. O potencial
e
na regi˜o xa < x < xb pode ser aproximadamente U (x) = 1 k(x − x0 )2 . Uma part´
a 2 ıcula com energia
em torno de E0 oscilar´ quase no ponto x = x0 . Estes pontos s˜o como um ponto de equil´
a a ıbrio,
porque a part´ ıcula est´ no ponto x = x0 ela permanecer´ ali. O equil´
a a ıbrio pode ser est´vel, inst´vel
a a
ou neutro. O unico equil´
´ ıbrio examinado ´ o est´vel porque se a part´
e a ıcula est´ localizada na regi˜o
a a
onde x = x0 dever´ finalmente retornar ao ponto. Podemos usar uma tigela esf´ricae e uma uma
a e
bolinha de a¸o como um exemplo. Com a tigela na su posi¸˜o natural, a bola pode rolar de um
c ca
ponto a outro no interior da tigela; mas finalemente ficar´ em repouso na sua base–em outros
a
termos, h´ um equil´
a ıbrio est´vel. Se virarmos a tigela com borda superior para baixo e colocar
a
a bola precisamente em de x = x0 (no topo da tigela), a bola estar´ em equil´ a ıbrio. Se a bola
estiver localizada liegiramente fora do ponto x = x0 , ela rola para fora (descer´!!); chamamos este
a
equil´ıbrio de inst´vel. O equil´
a ıbrio neutro ´ observado quando a bola estiver rolando sobre um
e
plano polido, numa superf´ horizontal.
ıcie
Em geral, podemos expressar o potencial U (x) em s´ries de Taylor em torno do ponto de
e
equil´ıbrio. Por simplicidade, assumimos o ponto de equil´ ıbrio para x = 0 em x = x0 (se n˜o, a
∗ N.T.: ligado aqui significa confinado a uma certa regi˜o do espa¸o.
a c
Projeto AIUTA – Mecˆnica Cl´ssica I
a a (UNIFRA–2004)](https://image.slidesharecdn.com/leisdenewtondamecanica-100730120243-phpapp01/85/Leis-de-newton-da-mecanica-31-320.jpg)

![2.6. ENERGIA --- 79
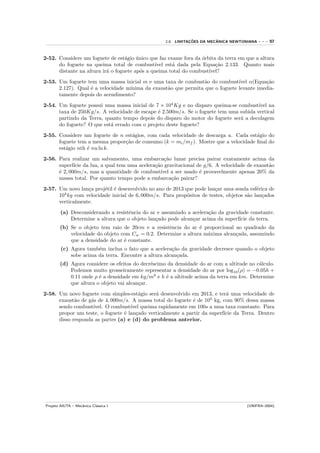
E X E M P L O 2.12 − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − −
Considerando um sistema de roldanas, massas e fios finos apresentado na Figura 2-15.
Um fio de comprimento b ´ fixado no ponto A, passando sobre uma roldana no ponto
e
B localizada a uma distˆncia 2d , e finalmente liga-se na massa m1 . Outra roldana com
a
massa m2 ´ fixada passando sobre o fio, puxando-o para baixo entre A e B. Calcule a
e
distˆncia x1 quando o sistema est´ em equil´
a a ıbrio e determine se o equil´
ıbrio ´ est´vel
e a
ou n˜o. Essas roldanas n˜o possuem massa.
a a
Solu¸˜o: Podemos resolver este exemplo usando for¸as (i. e., quando x1 = 0 = x1 ) ou energia.
ca c ¨ ˙
Escolhemos o m´todo da energia, porque em equil´
e ıbrio a energia cin´tica ´ zero e necessitamos
e e
quantificar somente com a energia potencial quando a Equa¸˜o 2.100 ´ aplicada.
ca e
Admitindo U = 0 ao longo da linha AB.
U = −m1 gx1 − m2 g(x2 + c) (2.104)
Assumindo que a polia que suporta a massa m2 ´ pequena, ent˜o podemos ignorar o raio. A
e a
distˆncia c na Figura 2-15 ´ constante.
a e
x2 = [(b − x1 )2 /4] − d2
U = −m1 gx1 − m2 g [(b − x1 )2 /4] − d2 − m2 gc
FIGURA 2-15
ca ca ıbrio (x1 )0 ≡ x0 :
Por determina¸˜o dU/dx1 = 0, podemos determinar a posi¸˜o de equil´
Projeto AIUTA – Mecˆnica Cl´ssica I
a a (UNIFRA–2004)](https://image.slidesharecdn.com/leisdenewtondamecanica-100730120243-phpapp01/85/Leis-de-newton-da-mecanica-33-320.jpg)
![80 --- 2 / MECANICA NEWTONIANA – PART´
ˆ ´
ICULA UNICA
dU m2 g(b − x0 )
= −m1 g + =0
dx1 0 4 [(b − x1 )2 /4] − d2
4m1 [(b − x1 )2 /4] − d2 = m2 (b − x0 )
(b − x0 )2 (4m2 − m2 ) = 16m2 d2
1 2 1
4m1 d
x0 = b − (2.105)
4m2 − m2
1 2
Note que a real solu¸˜o existe somente quando 4m2 > m2 .
ca 1 2
Sob quais circunstˆncias a massa m2 ir´ puxar m1 at´ a polia B (i. e., x1 = 0)? Podemos
a a e
usar a Equa¸˜o 2.103 para determinar se o equil´
ca ıbrio ´ est´vel ou n˜o:
e a a
d2 U −m2 g m2 g(b − x1 )2
2 = +
dx1 4{[(b − x1 )2 /4] − d2 }1/2 16{[(b − x1 )2 /4] − d2 }3/2
Agora insira x1 = x0 .
d2 U g(4m2 − m2 )3/2
1 2
=
dx21 0 4m2 d
2
A condi¸˜o para o equil´
ca ıbrio (movimento real) previamente foi para 4m2 > m2 , ent˜o o equil´
1 2 a ıbrio,
quando ele existe, ser´ est´vel, porque (d2 U/dx2 )0 > 0.
a a
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
E X E M P L O 2.13 − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − −
Considere um potencial unidimensional
−Wd2 (x2 + d2 )
U(x) = (2.106)
x4 + 8d4
´
Trace o potencial e discuta o movimento dos diversos valores de x. E um movimento
ligado ou n˜o ligado? Em um gr´fico, mostre onde est˜o os valores de equil´
a a a ıbrio. S˜o
a
eles est´veis ou inst´veis? Encontre o ponto de giro para E = −W/8, sabendo-se que
a a
W ´ uma constante positiva.
e
Solu¸˜o: Reescreva o potencial como
ca
U (x) −(y 2 + 1) x
Z(y) = = onde y = (2.107)
W y4 + 8 d
Primeiro, encontre os pontos de equil´
ıbrio, considerando o potencial.
dZ −2y 4y 3 (y 2 + 1)
= 4 + =0
dy y +8 (y 4 + 8)2
Isto ´ reduzido para
e
y(y 4 + 2y 2 − 8) = 0
y(y 2 + 4)(y 2 − 2) = 0
2
y0 = 2, 0
Projeto AIUTA – Mecˆnica Cl´ssica I
a a (UNIFRA–2004)](https://image.slidesharecdn.com/leisdenewtondamecanica-100730120243-phpapp01/85/Leis-de-newton-da-mecanica-34-320.jpg)















O documento apresenta as Leis de Newton da mecânica clássica. A primeira lei estabelece que um corpo permanece em repouso ou movimento uniforme a menos que uma força atue sobre ele. A segunda lei relaciona a força aplicada a um corpo com a variação do seu momento linear. A terceira lei estabelece que as forças exercidas entre dois corpos são iguais em magnitude e opostas em direção. O texto discute os significados dessas leis e como elas permitem definir conceitos fundamentais como massa e for









































































