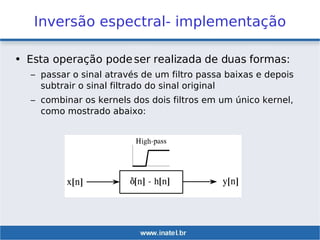
O documento discute conceitos básicos de filtros digitais, incluindo suas principais funções, vantagens sobre filtros analógicos e formas de representação. Apresenta também os tipos de filtros digitais FIR e IIR e métodos para projetar filtros no domínio da frequência, como inversão e reversão espectral.

![Inversão espectral – Porque funciona?
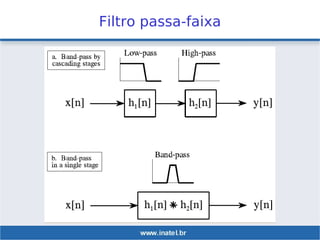
• O sinal de entrada x[n] é
aplicado nos dois sistemas em
paralelo
– o de cima é um FPB
– o de baixo é um passa-tudo
• O sinal resultante y[n] é igual à saída do sistema
passa tudo menos a saída do FPB.
• Desde que as componentes de baixa frequência
foram subtraídas do sinal original, restaram apenas
as componentes de alta frequência!](https://image.slidesharecdn.com/introfiltros-191204132449/85/Intro-filtros-21-320.jpg)





















![(2013-05-20) [DevInSampa] AudioLazy - DSP expressivo e em tempo real para o P...](https://cdn.slidesharecdn.com/ss_thumbnails/20130520devinsamparevisedptbr-130520113224-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)












![[02] Aula 02.pdf fundamentos de comunicação](https://cdn.slidesharecdn.com/ss_thumbnails/02aula02-250627005034-e3a144ec-thumbnail.jpg?width=640&height=640&fit=bounds)



















