Baixado 88 vezes

![MECANISMOS CAPÍTULO 2
14
z2
= r3
2
+ r4
2
– 2r3r4 cos γ (2.2)
Portanto,
r1
2
+ r2
2
– 2r1r2 cos θ2 = r3
2
+ r4
2
– 2r3r4 cos γ
e
cos γ = ( r1
2
+ r2
2
– r3
2
– r4
2
– 2r1r2 cos θ2 ) / (–2r3r4)
ou
γ = cos-1
[ ( z2
– r3
2
– r4
2
) / (–2r3r4) ] (2.3)
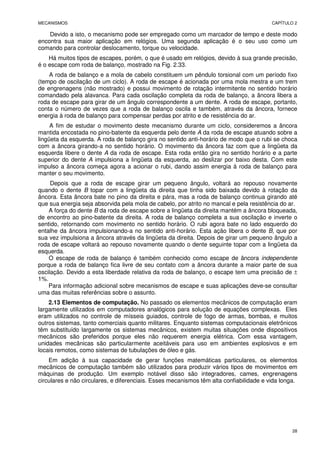
onde o valor de z é calculado através da primeira das duas equações deduzidas pela lei dos
cossenos (Eq. 2.1). Com as dimensões das peças conhecidas (isto é, r1, r2, r3 e r4), γ é função
apenas do ângulo de entrada θ2. Deve ser notado que haverão dois valores para γ,
correspondente a apenas um valor de θ2, porque a função arco-cosseno fornece dois valores.
Fisicamente, o segundo valor de γ corresponde ao segundo modo de montagem, arranjo ou
fechamento, do mecanismo de quatro barras, conforme mostrado na Fig. 2.3b. Para cada valor de
entrada de θ2, o mecanismo de quatro barras pode ser montado de duas formas diferentes.
Figura 2.3b
Figura 2.3c
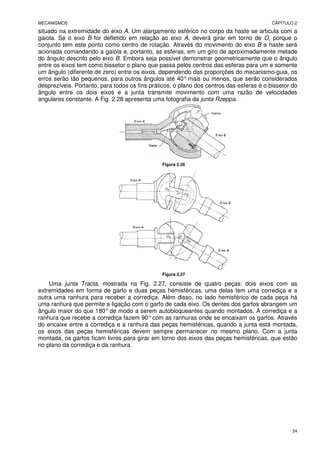
De um modo geral, para uma melhor transmissão de força pelo mecanismo, as peças 3 e 4
deverão estar quase perpendiculares através do ciclo de movimento. Se o ângulo de transmissão
se desvia de +90°ou -90°por mais do que 45°ou 50°
, o mecanismo tende a parar devido ao atrito
nas juntas; também as peças 3 e 4 tendem a se alinhar e podem travar. É especialmente
importante verificar os ângulos de transmissão quando mecanismos são projetados para trabalhar
perto dos pontos mortos. Uma ilustração dos ângulos de transmissão mínimo e máximo de um
mecanismo de quatro barras é mostrado na Fig. 2.3c por γ’ e γ”, respectivamente. No mecanismo,
a peça 2 gira completamente e a peça 4 oscila.
O ângulo de saída do mecanismo de quatro barras (ângulo θ4, na Fig. 2.3a) pode ser
encontrado numa forma particular como uma função de θ2. Em referência à Fig. 2.3a, a lei dos
cossenos pode ser usada para expressar os ângulos α e β como segue:
α = cos-1
[ ( z2
+ r4
2
– r3
2
) / (–2zr4)] (2.4)
β = cos-1
[ ( z2
+ r1
2
– r2
2
) / (–2zr1)] (2.5)
O ângulo θ4 na Fig. 2.3a é dado por
θ4 = 180°– (α + β) (2.6)](https://image.slidesharecdn.com/apostila-mecanismos-captulo2-220421221905/85/Apostila-Mecanismos-Capitulo-2-pdf-2-320.jpg)

![MECANISMOS CAPÍTULO 2
16
1. Dois mecanismos tipo manivela-balancim, diferentes, quando a menor peça for a manivela
e qualquer das peças adjacentes for a peça fixa.
2. Um mecanismo manivela dupla quando a menor peça for a fixa.
3. Um balancim duplo quando a peça oposta à menor for a peça fixa.
Também, se a soma dos comprimentos da maior e da menor for maior do que a soma dos
comprimentos das outras duas, somente resultarão balancins duplos. Ainda, se a soma da maior e
da menor peça for igual à soma das outras duas, os quatro mecanismos possíveis são similares
aos dos casos 1, 2 e 3 acima. Entretanto, neste último caso a linha de centros do mecanismo
pode ficar alinhada com as peças de modo que a manivela conduzida possa mudar o sentido de
rotação, a não ser que algo seja feito para evitá-lo. Tal mecanismo é apresentado na Fig. 2.4b,
onde as peças podem ficar alinhadas com a linha de centros O2O4. Nesta posição, o sentido de
rotação da peça 4 pode mudar, a não ser que a inércia desta peça a leve a ultrapassar este ponto.
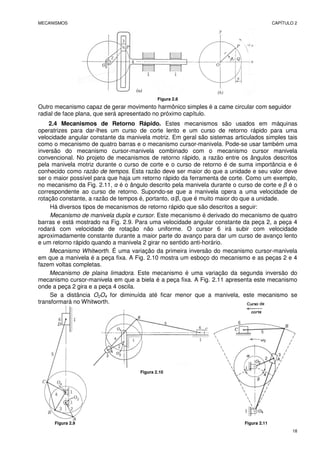
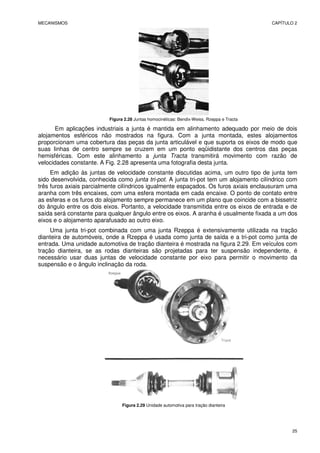
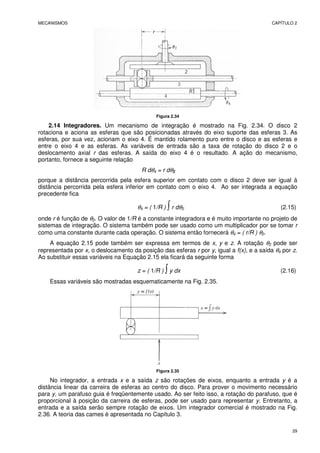
2.2 Mecanismo Cursor-Manivela. Este mecanismo é amplamente utilizado e encontra sua
maior aplicação no motor de combustão interna. A Fig. 2.5a mostra um esboço em que a peça 1 é
o bloco do motor (considerado fixo), a peça 2 é a manivela, a peça 3 a biela e a peça 4 o êmbolo.
Sobre a peça 4 atua a pressão dos gases, no motor de combustão interna. A força é transmitida à
manivela através da biela. Pode-se ver que haverá dois pontos mortos durante o ciclo, um em
cada posição extrema do curso do êmbolo. Para evitar a parada do mecanismo nesses pontos
mortos é necessário o emprego de um volante solidário à manivela. Este mecanismo também é
usado em compressores de ar, onde um motor elétrico aciona a manivela que por sua vez
impulsiona o êmbolo que comprime o ar. Considerando o mecanismo cursor-manivela, é
necessário calcular o deslocamento do cursor, suas velocidade e aceleração correspondentes. As
equações de deslocamento, velocidade e aceleração são obtidas usando-se a Fig. 2.5b.
Figura 2.5
x = R + L – R cos θ – L cos φ
= R ( 1 – cos θ ) + L ( 1 – cos φ )
= R ( 1 – cos θ ) + L { 1 – [ 1 – ( R / L )2
sen2
θ ]1/2
} (2.7)
A fim de simplificar a expressão acima, o radical pode ser aproximado substituindo-o de
acordo com a série
( ) ⋅
⋅
⋅
±
⋅
⋅
⋅
⋅
⋅
−
⋅
⋅
⋅
±
⋅
−
±
=
±
8
6
4
2
5
3
1
6
4
2
3
1
4
2
2
1
1
1
8
6
4
2
2
/
1
2 B
B
B
B
B
onde B = ( R/L ) sen θ.
Em geral o uso dos dois primeiros termos da série já possibilita uma precisão suficiente.
Portanto,
θ
θ 2
2
2
2
2
1
1
1 sen
L
R
sen
L
R
−
=
− (aproximadamente)
e
x = R ( 1 – cos θ ) + ( R2
/ 2L ) sen2
θ](https://image.slidesharecdn.com/apostila-mecanismos-captulo2-220421221905/85/Apostila-Mecanismos-Capitulo-2-pdf-4-320.jpg)






![MECANISMOS CAPÍTULO 2
34
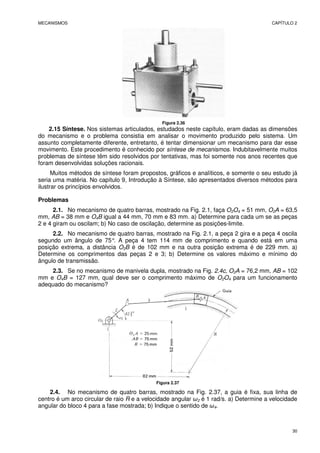
RESPOSTAS DE ALGUNS DOS EXERCÍCIOS PROPOSTOS
2.1. (a) Duplo Balancim; θmin = 90,8°
; θmax = 269,2°
; (b) Duplo Balancim; θmin = 141°
; θmax = 30°
; (c) Duplo Balancim; θmin = 44,6°
; θmax = 315,4°
.
2.2. O2A = 63,5 mm; AB = 165,5 mm; γmin = 37,15°
; γmax = 91,04.
2.3. O2O4max = 51,2 mm ( a Lei de Grashoff foi atendida).
2.4. ω4 = 0,21 rad/s no sentido horário.
2.7. Vmax =12,86 m/s em θ = 77°
; Vmin = -12,86 m/s em θ = 283°
; Amax = 3906 m/s2
em θ = 0°
; Amin = -2344 m/s2
em θ =180°
.
2.8. x = 54,523 sen θ - 25,652 cos θ.
2.9. Vmax = 52,36 mm/s; Amax = 548,31 mm/s2
.
2.10. x = R (1 – cosθ) + r { 1 – [ 1 – (Rsenθ / r)2
]1/2
}
2.11. V(0°
) = -2,69; V(45°
) = -1,96; V(90°
) = -0,76; V(135°
) = 0,34; V(180°
) = 0,80; V(225°
) = 0,80; V(270°
) = 0,79; V(315°
) = 1,13 m/s.
2.12. Curso = 304 mm; RT = 1,83.
2.13. Curso = 254 mm; RT = 2,01.
2.14. Curso = 494 mm; RT = 1,65.
2.15. O2A = 152,5 mm; O2O4 = 52,16 mm; O4B = 152,5 mm; BC = 457,5 mm (Obs.: outras soluções são possíveis).
2.16. O2A = 101,7 mm; O2O4 = 297,3 mm; O4B = 445,9 mm; BC = 222,9 mm (Obs.: outras soluções são possíveis).
2.17. x = [(C + D)Rsenθ] / (D + Rcosθ).
2.18. ω4/ω2 = 0,155; RT = 1,21.
2.19. x = [(R + L)2
– y2
]1/2
– Rcosθ – L{1 – [(Rsenθ – y) / L]2
}1/2
2.20. O2A = 139,8 mm; AB = 375,6 mm.
2.21. (a) Curso = 158,3 mm; (b) O2B = 100 mm; (c) RT = 1,23.
2.28. ωmin = 70,7 rpm a 90°e 270°
; ωmax = 141,4 rpm a 0°e 180°
.](https://image.slidesharecdn.com/apostila-mecanismos-captulo2-220421221905/85/Apostila-Mecanismos-Capitulo-2-pdf-22-320.jpg)

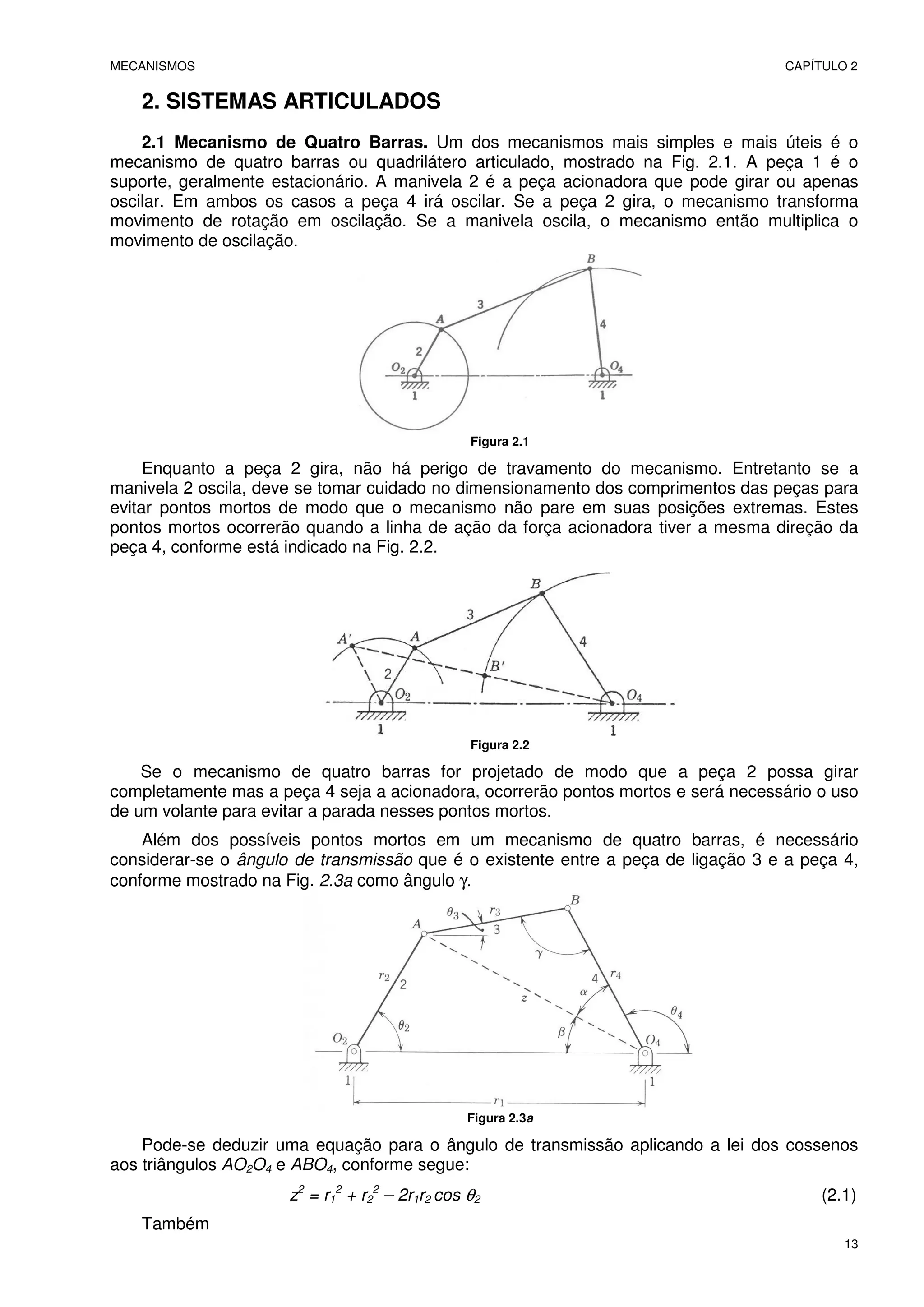
O capítulo aborda o mecanismo de quatro barras, destacando sua simplicidade e utilidade em transformar movimento de rotação em oscilação. Apresenta também a análise de posições e os cuidados a serem tomados para evitar pontos mortos e garantir uma transmissão de força adequada. Menciona variações do mecanismo, como a manivela-balancim e o mecanismo cursor-manivela, e discute seus usos em diferentes aplicações, incluindo motores de combustão interna e máquinas operatrizes.



























