Flexão pura ii
•Transferir como PPT, PDF•
0 gostou•1,094 visualizações

Este documento discute as tensões e deformações em barras elásticas submetidas à flexão. Ele apresenta as fórmulas para calcular a tensão máxima, a tensão em qualquer ponto e a curvatura da barra. Também aborda como essas fórmulas se aplicam a barras compostas por vários materiais, com diferentes módulos de elasticidade.

Recomendados
Mais conteúdo relacionado
Mais procurados
Mais procurados (19)
Semelhante a Flexão pura ii
Semelhante a Flexão pura ii (20)
Flexão pura ii
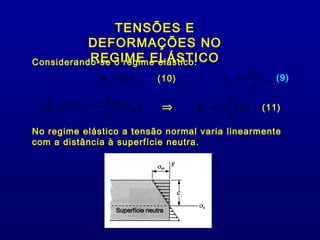
- 1. TENSÕES E DEFORMAÇÕES NO REGIME ELÁSTICO Considerando-se o regime elástico: y σx = E εx (10) ε x = − ε m (9) c y y σ x = E ε x = − (E ε m ) ⇒ σ x = − (σ m ) (11) c c No regime elástico a tensão normal varia linearmente com a distância à superfície neutra.
- 2. Deve-se agora determinar a posição da linha neutra e o valor máximo da tensão normal σ m . Substituindo-se a Eq. (11) em (1): y ∫ σ dA = 0 x (1) σ x = − (σ m ) (11) c y σm ∫ σ x dA = ∫ − c σ m dA = − c ∫ y dA = 0 Da última igualdade é deduzida: ∫ y dA = 0 (12) Essa equação mostra que o momento estático da área da seção transversal em relação a linha neutra é zero. Para barras submetidas à flexão pura, a linha neutra passa pelo centro geométrico da seção, enquanto as tensões permanecem em regime elástico.
- 3. Lembrando da equação (3), que foi deduzida para um eixo arbitrário z, ∫ (− y σ x )dA = M (3) e adotando que o eixo arbitrário z coincide com a linha neutra da seção transversal, substitui-se nessa equação o valor de σ x dado por y σ x = − (σ m ) (11) c assim: y ∫ (− y) - c σ m dA = M σm c ∫ y 2 dA = M (13)
- 4. σm c ∫ y 2 dA = M (13) A integral da expressão anterior representa o momento de inércia I da seção transversal em relação à linha neutra. Com isso, pode-se determinar o valor da tensão máxima através da expressão: Mc σm = (14) I Para determinar o valor da tensão σ x a uma distância y da linha neutra, basta substituir σ m na Eq. (14) em (11): My y σx = − (15) σ x = − (σ m ) (11) I c
- 5. Mc My σm = (14) σx = − (15) I I As equações (14) e (15) são conhecidas como fórmulas da flexão em regime elástico , e a tensão normal σ x , provocada quando a barra se flexiona, é chamada tensão de flexão. flexão Pode-se ver que a tensão é de compressão acima do eixo neutro ( σ m < 0 e y > 0), quando M > 0. A relação I/c é chamada módulo resistente ou momento resistente e é expressa por W. Desse modo a equação (14) pode ser reescrita na forma: M σm = (16) W
- 6. A deformação da barra submetida à flexão é medida pela curvatura da superfície neutra. A curvatura é definida como o inverso do raio de curvatura ρ, e pode ser calculada resolvendo-se a equação abaixo em termos de 1/ ρ: c 1 εm εm = ⇒ = ρ ρ c σm Mas, em regime elástico, tem-se:ε m = E 1 σm 1 Mc E ainda: = = ρ Ec Ec I Mc σm = (14) 1 M I = (17) ρ EI
- 7. DEFORMAÇÕES EM UMA SEÇÃO TRANSVERSAL Observa-se que uma seção transversal se mantém plana, em uma barra sujeita a flexão pura, porém, não se exclui a possibilidade de ocorrerem deformações dentro do plano da seção. Tais deformações realmente existem e podem se determinadas a partir de ε x empregando-se o coeficiente de Poisson. −y εy = - ν εx ∴ εz = - ν εx εx = (8) ρ νy νy (18) εy = ∴ εz = ρ ρ
- 8. FLEXÃO DE BARRAS CONSTITUÍDAS POR VÁRIOS As MATERIAIS deduções feitas até aqui se baseiam na hipótese de material homogêneo com um certo módulo de elasticidade. Se a barra submetida a flexão pura é constituída de dois ou mais materiais, com diferentes módulos de elasticidade, o enfoque para a determinação das tensões na barra deve ser modificado. Considere, por exemplo, uma barra constituída de duas partes de materiais diferentes: M M
- 9. A barra composta vai se deformar como foi descrito anteriormente para a barra homogênea feita de um único material. A seção transversal se mantém a mesma em toda a extensão da peça, e uma vez que não foi adotada nenhuma condição que envolvesse a relação tensão-deformação é válida a expressão: −y εx = (8) ρ De qualquer modo, não podemos assumir que a linha neutra passa pelo centróide da seção transversal, e um dos objetivos da presente análise será a determinação da localização desta linha.
- 10. As expressões para a determinação das tensões em cada material serão diferentes: E1 y σ1x = E1 ε x = − ρ (19) E2y σ2x = E 2 ε x = − ρ Com estas expressões é obtida uma distribuição de tensões que leva a um diagrama que consiste em dois segmentos retilíneos: εx Y Y 1 σ 1x L.N. 2 σ 2x
- 11. Uma força dF 1 exercida sobre um elemento de área dA da parte superior da seção transversal é definido por: E1 y dF1 = σ1x dA = − dA (20) 1 ρ Por sua vez, uma força dF 2 exercida 2 sobre um elemento de área dA da parte inferior da seção transversal é: E2y dF2 = σ 2 x dA = − dA (21) ρ Chamando de n a relação E 2 /E 1 entre os módulos de elasticidade, pode-se expressar dF 2 como: E2y (nE1 ) y E1 y dF2 = − dA = − dA = − (ndA ) (22) ρ ρ ρ
- 12. Comparando-se as equações (20) e (22), pode-se observar que a força dF 2 que se exerce no material na parte inferior da barra vai se exercer em um área em uma área de valor n dA do primeiro material. E1 y E1 y dF1 = − dA (20) dF2 = − (ndA ) (22) ρ ρ Em outras palavras, a resistência à flexão permanece a mesma se ambas as partes forem feitas do primeiro material, desde que a largura de cada elemento da parte inferior seja multiplicado pelo fator n. Deve-se observar que o alargamento (se n > 1) ou estreitamento (se n < 0), deve ser efetuado em uma direção paralela à linha neutra da seção transversal, pois é essencial que a distância y de cada elemento à linha permaneça a mesma.
- 13. Assim, para uma viga composta de dois materiais: parte posta original seção = L.N. dA n dA b n b seção My σx = − (15) I onde y é a distância à superfície neutra e I é o momento de inércia da seção transformada em relação ao seu centróide.