Este manual fornece instruções sobre programação e operação do inversor de frequência CFW-11. Ele contém capítulos sobre segurança, especificações técnicas, tipos de controle, parâmetros, entradas/saídas, alarmes e comunicação. O manual explica como configurar e operar o CFW-11 para controles escalar, V/f, vetorial e PM para diferentes aplicações industriais.




![Índice
Capítulo 0
Referência Rápida dos Parâmetros, Falhas e Alarmes
Referência Rápida dos Parâmetros......................................................................................................0-1
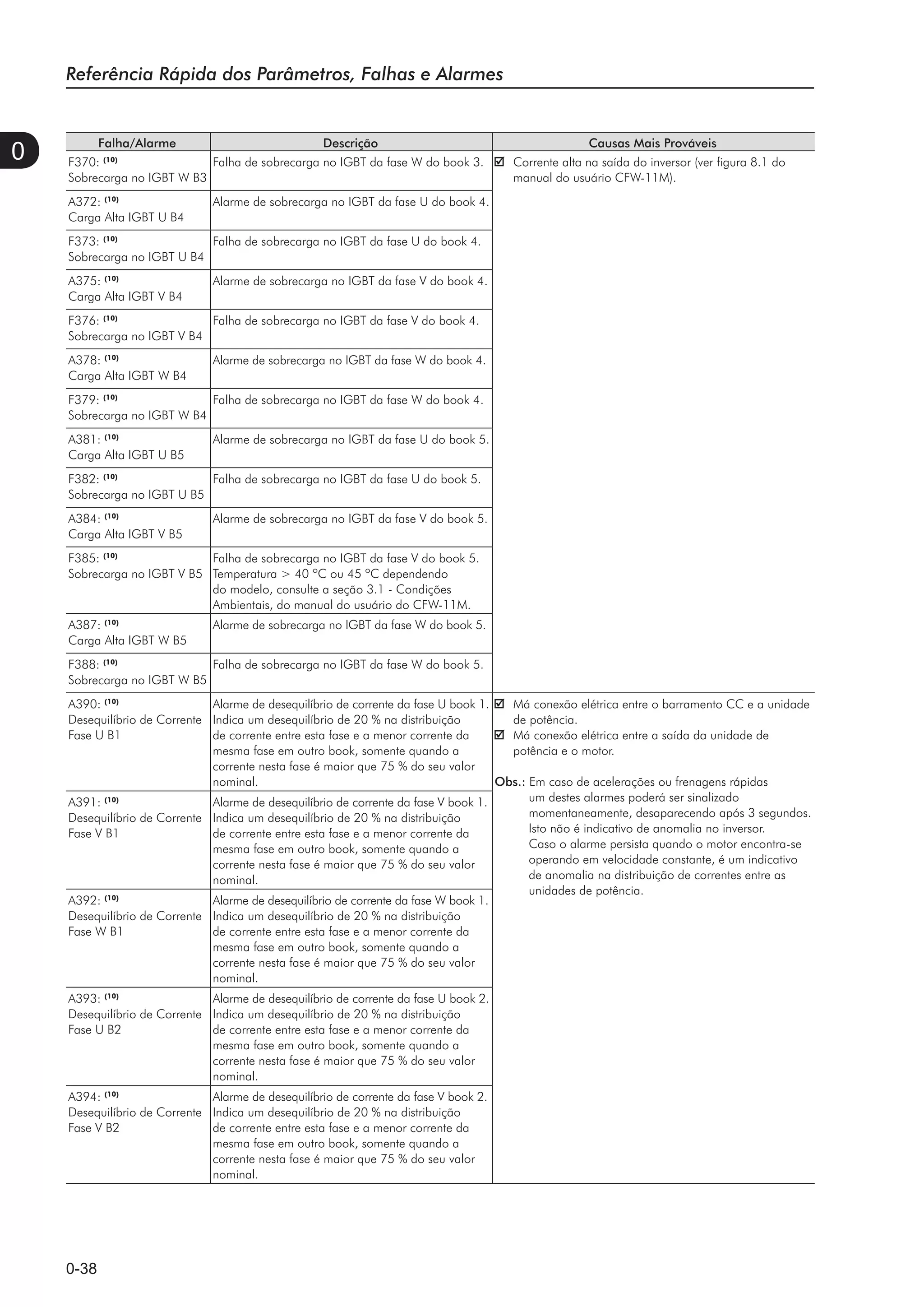
Referência Rápida das Falhas e Alarmes............................................................................................0-30
Capítulo 1
Instruções de Segurança
1.1 Avisos de Segurança no Manual...................................................................................................1-1
1.2 Aviso de Segurança no Produto....................................................................................................1-1
1.3 Recomendações Preliminares........................................................................................................1-2
Capítulo 2
Informações Gerais
2.1 Sobre o Manual ........................................................................................................................2-1
2.2 Terminologia e Definições............................................................................................................2-1
2.2.1 Termos e Definições Utilizados no Manual............................................................................2-1
2.2.2 Representação Numérica....................................................................................................2-3
2.2.3 Símbolos para Descrição das Propriedades dos Parâmetros....................................................2-3
Capítulo 3
Sobre o CFW-11
3.1 Sobre o CFW-11 ........................................................................................................................3-1
Capítulo 4
HMI
4.1 HMI ..........................................................................................................................................4-1
Capítulo 5
Instruções Básicas para Programação
5.1 Estrutura de Parâmetros...............................................................................................................5-1
5.2 Grupos Acessados na Opção Menu do Modo de Monitoração......................................................5-2
5.3 Ajuste da Senha em P0000..........................................................................................................5-3
5.4 HMI [30]....................................................................................................................................5-4
5.5 Ajuste de Data e Horário.............................................................................................................5-9
5.6 Ajuste das Indicações do Display no Modo Monitoração..............................................................5-10
5.7 Incompatibilidade de Parâmetros................................................................................................5-12
Capítulo 6
Identificação do Modelo do Inversor e Acessórios
6.1 Dados do Inversor [42]...............................................................................................................6-2](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-5-2048.jpg)
![Índice
Capítulo 7
Colocação em Funcionamento e Ajustes
7.1 Parâmetros de Backup [06]..........................................................................................................7-1
Capítulo 8
Tipos de Controle Disponíveis
8.1 Tipos de Controle........................................................................................................................8-1
Capítulo 9
Controle Escalar (V/f)
9.1 Controle V/f [23]........................................................................................................................9-2
9.2 Curva V/f Ajustável [24]..............................................................................................................9-6
9.3 Limitação de Corrente V/f [26]....................................................................................................9-7
9.4 Limitação do Barramento CC V/f [27]........................................................................................9-10
9.5 Colocação em Funcionamento no Modo de Controle V/f.............................................................9-13
Capítulo 10
Controle VVW
10.1 Controle VVW [25]................................................................................................................10-3
10.2 Dados do Motor [43]..............................................................................................................10-3
10.3 Colocação em Funcionamento no Modo de Controle VVW.......................................................10-4
Capítulo 11
Controle Vetorial
11.1 Controle Sensorless e com Encoder..........................................................................................11-1
11.2 Modo I/F (Sensorless)..............................................................................................................11-5
11.3 Auto-Ajuste.............................................................................................................................11-5
11.4 Fluxo Ótimo para Controle Vetorial Sensorless..........................................................................11-6
11.5 Controle de Torque.................................................................................................................11-7
11.6 Frenagem Ótima....................................................................................................................11-8
11.7 Dados do Motor [43]............................................................................................................11-10
11.7.1 Ajuste dos Parâmetros P0409 a P0412 a partir da Folha de Dados do Motor.................11-15
11.8 Controle Vetorial [29]...........................................................................................................11-16
11.8.1 Regulador de Velocidade [90]....................................................................................11-16
11.8.2 Regulador de Corrente [91]........................................................................................11-19
11.8.3 Regulador de Fluxo [92].............................................................................................11-20
11.8.4 Controle I/F [93].......................................................................................................11-23
11.8.5 Auto-Ajuste [05] e [94]..............................................................................................11-24
11.8.6 Limitação Corrente Torque [95]..................................................................................11-29
11.8.7 Regulador do Barramento CC [96].............................................................................11-31
11.9 Colocação em Funcionamento nos Modos de Controle Vetorial Sensorless e com Encoder.........11-33](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-6-2048.jpg)
![Índice
Capítulo 12
Funções Comuns a Todos os Modos de Controle
12.1 Rampas [20]..........................................................................................................................12-1
12.2 Referência de Velocidade [21].................................................................................................12-3
12.3 Limites de Velocidade [22].......................................................................................................12-5
12.4 Multispeed [36]......................................................................................................................12-7
12.5 Potenciômetro Eletrônico [37]..................................................................................................12-9
12.6 Lógica de Parada [35]...........................................................................................................12-10
12.7 Flying Start / Ride-Through [44].............................................................................................12-11
12.7.1 Flying Start V/f...........................................................................................................12-12
12.7.2 Flying Start Vetorial....................................................................................................12-12
12.7.2.1 P0202=3...................................................................................................12-12
12.7.2.2 P0202=4...................................................................................................12-15
12.7.3 Ride-Through V/f........................................................................................................12-15
12.7.4 Ride-Through Vetorial.................................................................................................12-16
12.8 Frenagem CC [47]...............................................................................................................12-19
12.9 Pular Velocidade [48]............................................................................................................12-23
12.10 Busca de Zero do Encoder...................................................................................................12-24
Capítulo 13
Entradas e Saídas Digitais e Analógicas
13.1 Configuração de I/O [07].......................................................................................................13-1
13.1.1 Entradas Analógicas [38].............................................................................................13-1
13.1.2 Saídas Analógicas [39]................................................................................................13-6
13.1.3 Entradas Digitais [40].................................................................................................13-11
13.1.4 Saídas Digitais / a Relé [41].......................................................................................13-19
13.2 Comando Local [31] e Comando Remoto [32].......................................................................13-29
13.3 Comando a 3 Fios [33].........................................................................................................13-34
13.4 Comando Avanço/Retorno [34].............................................................................................13-34
Capítulo 14
Frenagem Reostática
14.1 Frenagem Reostática [28]........................................................................................................14-1
Capítulo 15
Falhas e Alarmes
15.1 Proteção de Sobrecarga no Motor............................................................................................15-1
15.2 Proteção de Sobretemperatura do Motor..................................................................................15-2
15.3 Proteções [45]........................................................................................................................15-4
15.4 Proteção de Sobretemperatura do Motor Usando Módulo IOE-01, IOE-02 ou IOE-03..............15-17
15.4.1 Sensor de Temperatura Tipo PTC.................................................................................15-18
15.4.2 Sensor de Temperatura Tipo PT100 ou KTY84..............................................................15-18](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-7-2048.jpg)
![Índice
Capítulo 16
Parâmetros de Leitura [09]
16.1 Histórico de Falhas [08]..........................................................................................................16-9
Capítulo 17
Comunicação [49]
17.1 Interface Serial RS-232 e RS-485.............................................................................................17-1
17.2 Interface CAN – CANopen/DeviceNet......................................................................................17-1
17.3 Interface Anybus-CC...............................................................................................................17-2
17.4 Interface Profibus DP...............................................................................................................17-3
17.5 Estados e Comandos da Comunicação....................................................................................17-4
Capítulo 18
SoftPLC [50]
18.1 SoftPLC...................................................................................................................................18-1
18.2 Configuração de I/O [07].......................................................................................................18-1
18.2.1 Entradas Digitais [40]...................................................................................................18-1
18.2.2 Saídas Digitais [41]......................................................................................................18-2
Capítulo 19
Função Trace [52]
19.1 Função Trace..........................................................................................................................19-1
Capítulo 20
Regulador PID [46]
20.1 Descrição e Definições............................................................................................................20-1
20.2 Colocação em Funcionamento................................................................................................20-3
20.3 Modo Dormir (Sleep)...............................................................................................................20-8
20.4 Telas do Modo de Monitoração...............................................................................................20-8
20.5 Ligação de Transdutor a 2 Fios................................................................................................20-9
20.6 Parâmetros.............................................................................................................................20-9
20.7 PID Acadêmico.....................................................................................................................20-16](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-8-2048.jpg)
![Índice
Capítulo 21
Controle Vetorial PM
21.1 Motores Síncronos a Ímãs Permanentes (PMSM).........................................................................21-1
21.2 Controle Pm Sensorless e Pm com Encoder...............................................................................21-1
21.2.1 PM Sensorless - P0202 = 7..........................................................................................21-2
21.2.2 PM com Encoder - P0202 = 6......................................................................................21-3
21.2.3 Funções Modificadas....................................................................................................21-4
21.3 Instruções Básicas para Programação – Incompatibilidade de Parâmetros....................................21-4
21.4 Identificação do Modelo do Inversor e Acessórios......................................................................21-4
21.5 Controle de Torque..................................................................................................................21-5
21.6 Dados do Motor [43] e Auto-Ajuste [05] ou [94].......................................................................21-6
21.7 Controle Vetorial PM [29]........................................................................................................21-8
21.7.1 Regulador de Velocidade [90]......................................................................................21-8
21.7.2 Regulador de Corrente [91]..........................................................................................21-9
21.7.3 Regulador de Fluxo [92]...............................................................................................21-9
21.7.4 Limitação da Corrente de Torque [95].........................................................................21-10
21.7.5 Regulador do Barramento CC [96].............................................................................21-10
21.7.6 Flying Start/Ride-Through [44]....................................................................................21-11
21.7.7 Frenagem CC [47]....................................................................................................21-12
21.7.8 Busca de Zero do Encoder..........................................................................................21-12
21.8 Colocação em Funcionamento no Modo de Controle Vetorial PM.............................................21-12
21.9 Falhas e Alarmes...................................................................................................................21-16
21.10 Parâmetros de Leitura [09]...................................................................................................21-16
21.11 Limites de Velocidade [22]...................................................................................................21-16](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-9-2048.jpg)























































![Instruções Básicas para Programação
5-4
5
5.4 HMI [30]
No grupo “30 HMI” estão disponíveis parâmetros relacionados com a apresentação das informações no display
da HMI. Veja a descrição detalhada a seguir sobre os ajustes possíveis desses parâmetros.
P0193 – Dia da Semana
Faixa de
Valores:
0 = Domingo
1 = Segunda-feira
2 = Terça-feira
3 = Quarta-feira
4 = Quinta-feira
5 = Sexta-feira
6 = Sábado
Padrão: 0 = Domingo
P0194 – Dia
Faixa de
Valores:
01 a 31 Padrão: 01
P0195 – Mês
Faixa de
Valores:
01 a 12 Padrão: 01
P0196 – Ano
Faixa de
Valores:
00 a 99 Padrão: 06
P0197 – Hora
Faixa de
Valores:
00 a 23 Padrão: 00
P0198 – Minutos
P0199 – Segundos
Faixa de
Valores:
00 a 59 Padrão: P0198 = 00
P0199 = 00
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
30 HMI
Descrição:
Esses parâmetros ajustam a data e o horário do relógio de tempo real do CFW-11. É importante configurá-los com
a data e hora corretos para que o registro de falhas e alarmes ocorra com informações reais de data e hora.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-66-2048.jpg)






![Instruções Básicas para Programação
5-11
5
Seq. Ação/Resultado Indicação no display
1
- Modo Monitoração.
- Pressione “Menu”
("soft key" direita).
Ready LOC 0rpm
16:10 Menu
0 rpm
0.0 A
0.0 Hz
2
- O grupo “00 TODOS
PARÂMETROS” já está
selecionado .
Ready LOC 0rpm
Sair 16:10 Selec.
00 TODOS PARAMETROS
01 GRUPOS PARAMETROS
02 START-UP ORIENTADO
03 PARAM. ALTERADOS
3
- O grupo “01 GRUPOS
PARÂMETROS” é
selecionado.
- Pressione “Selec.”.
Ready LOC 0rpm
Sair 16:10 Selec.
00 TODOS PARAMETROS
01 GRUPOS PARAMETROS
02 START-UP ORIENTADO
03 PARAM. ALTERADOS
4
- Uma nova lista de
grupos é mostrada
no display, tendo o
grupo “20 Rampas”
selecionado.
- Pressione até
o grupo “30 HMI” ser
selecionado.
Ready LOC 0rpm
Sair 16:10 Selec.
20 Rampas
21 Ref. Velocidade
22 Limites Velocidade
23 Controle V/F
5
- O grupo “30 HMI” é
selecionado.
- Pressione “Selec.”.
Ready LOC 0rpm
Sair 16:10 Selec.
27 Lim . Barram.CC V/F
28 Frenag. Reostatica
29 Controle Vetorial
30 HMI
6
- O parâmetro
“Dia P0194” já está
selecionado.
- Pressione
até selecionar “Sel.
Parâm. Leitura 1
P0205”.
Ready LOC 0rpm
Sair 16:10 Selec.
Dia
P0194: 06
Mes
P0195: 10
Seq. Ação/Resultado Indicação no display
7
- O parâmetro “Sel.
Parâm. Leitura 1
P0205” é selecionado.
- Pressione “Selec.”.
Ready LOC 0rpm
Sair 16:10 Selec.
Idioma
P0201 : Portugues
Sel. Param . Leitura 1
P0205 : Veloc Motor #
8
- Pressione até
selecionar a opção
“[11] Ref. Veloc. –”.
- Pressione “Salvar”.
Ready LOC 0rpm
Sair 16:10 Salvar
P0205
Sel. Param. Leitura 1
[011] Ref. Veloc. -
9 - Pressione “Sair”.
Ready LOC 0rpm
Sair 16:10 Selec.
Idioma
P0201 : Portugues
Sel. Param . Leitura 1
P0205 : Ref. Veloc. -
10 - Pressione “Sair”.
Ready LOC 0rpm
Sair 16:10 Selec.
27 Lim. Barram. CC V/F
28 Frenag: Reostatica
29 Controle Vetorial
30 HMI
11 - Pressione “Sair”.
Sair 16:10 Selec.
Ready LOC 0rpm
00 TODOS PARAMETROS
01 GRUPOS PARAMETROS
02 START-UP ORIENTADO
03 PARAM. ALTERADOS
12
- O display volta para o
Modo Monitoração com a
referência de velocidade
indicada por barra
gráfica.
Ready LOC 0rpm
16:10 Menu
rpm 5%
0.0 A
0.0 Hz
Figura 5.5 - Configura a monitoração no modo gráfico de barras
Para retornar ao Modo de Monitoração padrão (numérico), basta selecionar opções finalizadas com o sinal “#”
(valores de 1 a 10) nos parâmetros P0205, P0206 e/ou P0207.
Conteúdo do parâmetro P0205 na forma numérica com caracteres maiores:
Programe os parâmetros de leitura (P0206 e P0207) em zero (inativo) e P0205 como valor numérico (uma
opção finalizada com “#”). Assim, P0205 passa a ser exibido em caracteres maiores. A figura 5.6 ilustra esse
modo de monitoração.
Run LOC 1800rpm
11:23 Menu
Conteúdo do parâmetro definido em P0205,
com caracteres maiores.
Os parâmetros P0206 e P0207 devem ser
programados para 0.
rpm
1800
Figura 5.6 - Exemplo de tela no Modo Monitoração com P0205 em caracteres maiores](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-73-2048.jpg)

![Instruções Básicas para Programação
5-13
5
25) [P0221 ou P0222 programada para (7=E.P. )] E [sem DIx (P0263...P0270) programada para (11=Acelera
E.P.) OU sem DIx (P0263...P0270) programada para (12= Desacelera E.P.)];
26) [P0221 e P0222 não programadas para (7=E.P.)] E [com DIx (P0263...P0270) programada para
(11=Acelera E.P.) OU com DIx (P0263...P0270) programada para (12= Desacelera E.P.)];
27) [P0202 programada para (0=V/f 60 Hz) OU (1=V/f 50 Hz) OU (2=V/f Ajustável) OU (5=VVW)] E
[P0231=1(N* sem Rampa) OU P0231=2 (Máxima Corrente Torque) OU P0236=1 (N* sem Rampa) OU
P0236=2 (Máxima Corrente Torque) OU P0241=1 (N* sem Rampa) OU P0241=2 (Máxima Corrente
Torque) OU P0246=1 (N* sem Rampa) OU P0246=2 (Máxima Corrente Torque)];
28) [P0202 programada para (0=V/f 60 Hz) OU (1=V/f 50 Hz) OU (2=V/f Ajustável) OU (5=VVW)] E [DIx
(P0263...P0270) programada para (16=JOG+) OU (17=JOG-)];
29) P0203 programada para (1=Regulador PID) E P0217 para (1=Ativo) E [P0224 programada para (0=Teclas
,
29) P0203 programada para (1=Regulador PID) E P0217 para (1=Ativo) E [P0224 programada para (0=Teclas
) OU P0227 programada para (0=Teclas ,
29) P0203 programada para (1=Regulador PID) E P0217 para (1=Ativo) E [P0224 programada para (0=Teclas
)];
30) DIx (P0263...P0270) programada para (29=Temporizador DO2) sem DO2 (P0276) programada para
(29=Temporizador DO2);
31) DO2 (P0276) programada para (29=Temporizador) sem DIx (P0263...P0270) programada para
(29=Temporizador DO2);
32) DIx (P0263...P0270) programada para (30=Temporizador DO3) sem DO3 (P0277) programada para
(29=Temporizador);
33) DO3 (P0277) programada para (29=Temporizador) sem DIx (P0263...P0270) programada para
(30=Temporizador DO3);
34) [P0224 programada para (1=DIx) OU P0227 programada para (1=DIx)] E [sem DIx (P0263...P0270)
programada para (1=Gira/Pára) E sem DIx (P0263...P0270) programada para (2=Habilita Geral) E
sem DIx (P0263...P0270) programada para (3=Parada Rápida) E sem DIx (P0263...P0270) programada
para (4=Avanço) E sem DIx (P0263...P0270) programada para (5=Retorno) E sem DIx (P0263...P0270)
programada para (6=Start) E sem DIx (P0263...P0270) programada para (7=Stop)].
35) P0202 programado para 3 (Sensorless) ou 4 (Encoder) e P0297 = 0 (1.25 kHz).
36) P0297 programado para:
- 3 ou 4 na mecânica B e P0296 ajustado entre 500 V a 600 V.
- 3 ou 4 na mecânica D e P0296 ajustado entre 500 V a 690 V.
- 1, 2 ou 3 nas mecânicas E, F ou G e P0296 ajustado entre 500 V a 690 V, e nas mecânicas do Modular Drive.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-75-2048.jpg)


![Identificação do Modelo do Inversor e Acessórios
6-2
6
6.1 Dados do Inversor [42]
Nesse grupo encontram-se parâmetros relacionados às informações e características do inversor, como modelo
do inversor, acessórios identificados pelo circuito de controle, versão de software, frequência de chaveamento,
etc.
P0023 – Versão de Software
Faixa de
Valores:
0.00 a 655.35 Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
42 Dados do Inversor
Descrição:
Indica a versão de software contida na memória flash do microcontrolador localizado no cartão de controle.
P0027 – Configuração de Acessórios 1
P0028 – Configuração de Acessórios 2
Faixa de
Valores:
0000h a FFFFh Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
42 Dados do Inversor
Descrição:
Esses parâmetros identificam através de um código hexadecimal os acessórios que se encontram instalados no
módulo de controle.
Para os acessórios instalados nos slots 1 e 2 o código de identificação é informado no parâmetro P0027. No caso
de módulos conectados nos slots 3, 4 ou 5, o código será mostrado pelo parâmetro P0028.
A tabela 6.1 apresenta os códigos apresentados nestes parâmetros, relativos aos principais acessórios do CFW-11.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-78-2048.jpg)








![Colocação em Funcionamento e Ajustes
7-1
7
colocação em funcionamento e ajustes
Para colocar em funcionamento nos diversos tipos de controle, partindo da programação padrão de fábrica,
consulte as seguintes seções:
- 9.5 - Colocação em funcionamento no modo de controle V/f.
- 10.3 - Colocação em funcionamento no modo de controle V/f.
- 11.9 - Colocação em funcionamento no modo de controle V/f.
Para utilizar parâmetros previamente carregados, consulte a seção 7.1 - Parâmetros de Backup descrita a seguir.
7.1 Parâmetros de Backup [06]
As funções de BACKUP do CFW-11 permitem que se salve o conteúdo dos parâmetros atuais do inversor em
uma memória específica, ou vice-versa (sobrescrever os parâmetros atuais com o conteúdo da memória).
Além disso, há uma função exclusiva para atualização do software, através do Módulo de Memória Flash.
P0204 – Carrega/Salva Parâmetros
Faixa de
Valores:
0 = Sem função
1 = Sem função
2 = Reset P0045
3 = Reset P0043
4 = Reset P0044
5 = Carrega WEG 60 Hz
6 = Carrega WEG 50 Hz
7 = Carrega Usuário 1
8 = Carrega Usuário 2
9 = Carrega Usuário 3
10 = Salva Usuário 1
11 = Salva Usuário 2
12 = Salva Usuário 3
Padrão: 0 = Sem
função
Propriedades: CFG
Grupos de
Acesso via HMI:
06 PARÂMETROS BACKUP
Descrição:
Possibilita salvar os parâmetros atuais do inversor em uma área de memória EEPROM do módulo de controle
ou, o contrário, carregar os parâmetros com o conteúdo dessa área. Permite também zerar os contadores de
Horas Habilitado (P0043), kWh (P0044) e Horas do Ventilador Ligado (P0045). A tabela 7.1 descreve as ações
realizadas por cada opção.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-87-2048.jpg)


![Colocação em Funcionamento e Ajustes
7-4
7
Tabela 7.3 – Opções do parâmetro P0319
P0319 Ação
0 Inativa: nenhuma ação
1
Inversor → HMI: transfere o conteúdo atual dos parâmetros do inversor e das memórias do usuário 1/2/3 para a memória
não volátil da HMI (EEPROM). Os parâmetros atuais do inversor permanecem inalterados.(1)
2
HMI → Inversor: transfere o conteúdo da memória não volátil da HMI (EEPROM) para os parâmetros atuais do inversor e
para as memórias do usuário 1/2/3. Após concluída a transferência ocorre o reset do inversor.(1)
(1) O conteúdo de P0319 retorna para zero.
NOTA!
Caso a HMI tenha sido previamente carregada com os parâmetros de uma versão “diferente”
daquela do inversor para o qual ela está tentando copiar os parâmetros, a operação não será
efetuada e a HMI indicará a falha F082 (Falha na Função Copy). Entende-se por versão “diferente”
aquelas que são diferentes em “x” ou “y”, supondo que a numeração das versões de software
seja descrita como Vx.yz.
Exemplo: Versão V1.60 → (x=1, y=6 e z=0) previamente armazenada na HMI.
Versão do Inversor: V1.75 → (x’=1, y’=7 e z’=5)
P0319=2 → F082 [(y=6) → (y’=7)]
Versão do Inversor: V1.62 → (x’=1, y’=6 e z’=2)
P0319=2 → cópia normal [(y=6) = (y’=6)] e [(x=1) = (x'=1)]
Para copiar os parâmetros de um inversor para o outro, deve-se proceder da seguinte forma:
1. Conectar a HMI no inversor que se deseja copiar os parâmetros (Inversor A);
2. Fazer P0319=1 (Inv.→ HMI) para transferir os parâmetros do Inversor A para a HMI;
3. Pressionar a tecla "soft key" direita “Salvar”. P0319 volta automaticamente para 0 (Inativa), quando a
transferência estiver concluída;
4. Desligar a HMI do inversor;
5. Conectar esta mesma HMI no inversor para o qual se deseja transferir os parâmetros (Inversor B);
6. Colocar P0319=2 (HMI→ Inv.) para transferir o conteúdo da memória não volátil da HMI (EEPROM
contendo os parâmetros do Inversor A) para o Inversor B;
7. Pressionar a tecla "soft key" direita “Salvar”. Quando P0319 voltar para 0 a transferência dos parâmetros
foi concluída.
A partir deste momento os Inversores A e B estarão com o mesmo conteúdo dos parâmetros.
Obs.:
No caso dos inversores A e B não serem do mesmo modelo, verifique os valores de P0296 (Tensão Nominal)
e P0297 (Frequência de Chaveamento) no Inversor B;
Se os inversores A e B acionarem motores diferentes, verificar os parâmetros do motor do Inversor B.
8. Para copiar o conteúdo dos parâmetros do Inversor A para outros inversores, repetir os mesmos procedimentos
5 a 7 descrito anteriormente.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-90-2048.jpg)





![Controle Escalar (V/f)
9-2
9
9.1 Controle V/f [23]
P0136 – Boost de Torque Manual
Faixa de
Valores:
0 a 9 Padrão: 1
Propriedades: V/f
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
23 Controle V/f
Descrição:
Atua em baixas velocidades, aumentando a tensão de saída do inversor para compensar a queda de tensão na
resistência estatórica do motor, a fim de manter o torque constante.
O ajuste ótimo é o menor valor de P0136 que permite a partida satisfatória do motor. Valor maior que o necessário
irá incrementar demasiadamente a corrente do motor em baixas velocidades, podendo levar o inversor a uma
condição de falha (F048, F051, F071, F072, F078 ou F183) ou alarme (A046, A047, A050 ou A110).
tensão de saída
nominal
1/2 nominal
Velocidade
nnom/2 nnom
P0136=9
P0136=0
Figura 9.2 - Efeito de P0136 na curva V/f (P0202=0 ou 1)
P0137 – Boost de Torque Automático
Faixa de
Valores:
0.00 a 1.00 Padrão: 0.00
Propriedades: V/f
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
23 Controle V/f
Descrição:
O Boost de Torque Automático compensa a queda de tensão na resistência estatórica em função da corrente ativa
do motor.
Os critérios para o ajuste de P0137 são os mesmos que os do parâmetro P0136.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-96-2048.jpg)



![Controle Escalar (V/f)
9-6
9
Descrição:
Para obter uma visão geral dos tipos de controle e orientação para a escolha do tipo mais adequado para a
aplicação, consulte o capítulo 8 - Tipos de controle disponíveis.
No caso do modo V/f selecionar P0202=0, 1 ou 2:
Ajuste do parâmetro P0202 no modo V/f:
P0202=0 para motores com frequência nominal=60 Hz;
P0202=1 para motores com frequência nominal=50 Hz.
Obs.:
O ajuste adequado de P0400 garante a aplicação da correta relação V/f na saída, no caso de motores
com tensão a 50Hz ou 60Hz diferentes da tensão de entrada do inversor.
P0202=2 para motores especiais com frequência nominal diferente de 50 Hz ou 60 Hz ou para ajuste de
perfis da curva V/f especiais. Exemplo: aproximação de curva V/f quadrática para economia de energia
em acionamento de cargas de torque variável, como bombas centrífugas e ventiladores.
9.2 Curva V/f Ajustável [24]
P0142 – Tensão de Saída Máxima
P0143 – Tensão de Saída Intermediária
P0144 – Tensão de Saída em 3Hz
Faixa de
Valores:
0.0 a 100.0 % Padrão: P0142 = 100.0 %
P0143 = 50.0 %
P0144 = 8.0 %
P0145 – Velocidade de Início do Enfraquecimento de Campo
P0146 – Velocidade Intermediária
Faixa de
Valores:
0 a 18000 rpm Padrão: P0145 = 1800 rpm
P0146 = 900 rpm
Propriedades: Adj e CFG
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
24 Curva V/f Ajust
Descrição:
Esta função permite o ajuste da curva que relaciona a tensão e a frequência de saída do inversor através de
parâmetros conforme a figura 9.8 no modo V/f.
Necessária quando o motor utilizado tiver frequência nominal diferente de 50 Hz ou 60 Hz, ou quando desejada
curva V/f quadrática, para economia de energia no acionamento de bombas centrífugas e ventiladores, ou ainda
em aplicações especiais, como por exemplo quando usado transformador na saída do inversor, entre este e o motor.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-100-2048.jpg)
![9-7
9
Controle Escalar (V/f)
Função ativada com P0202=2 (V/f Ajustável).
O valor padrão de P0144 (8.0 %) é adequado para motores standard com frequência nominal de 60 Hz. No
caso de utilização de motor com frequência nominal (ajustada em P0403) diferente de 60 Hz, o valor padrão de
P0144 pode tornar-se inadequado, podendo causar dificuldade na partida do motor. Uma boa aproximação para
o ajuste de P0144 é dada pela fórmula:
p0144 =
3
x p0142
p0403
Caso for necessário aumentar o torque de partida, aumentar o valor de P0144 gradativamente.
tensão
de saída
tensão nominal da rede
100 %
P0142
P0143
P0144
0.1Hz 3Hz P0146 P0145 P0134
P0202=2
Velocidade/
Frequência
Figura 9.8 - Curva V/f em função de P0142 a P0146
9.3 Limitação de Corrente V/f [26]
P0135 – Corrente Máxima de Saída
Faixa de
Valores:
0.2 a 2xInom-HD
Padrão: 1.5xInom-HD
Propriedades: V/F e VVW
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
26 Lim.Corrente V/f
P0344 – Configuração da Limitação de Corrente
Faixa de
Valores:
0=Hold -LR ON
1=Desac. -LR ON
2=Hold -LR OFF
3=Desac. -LR OFF
Padrão: 3
Propriedades: V/f, CFG e VVW
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
26 Lim. Corrente V/f](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-101-2048.jpg)


![Controle Escalar (V/f)
9-10
9
9.4 Limitação do Barramento CC V/f [27]
Existem duas funções no inversor para limitar a tensão do barramento CC durante a frenagem do motor.
Atuam limitando o torque e a potência de frenagem, de forma a evitar o desligamento do inversor por
sobretensão (F022).
A sobretensão no barramento CC é mais comum quando acionada carga com alto momento de inércia ou
quando programado tempo de desaceleração curto.
NOTA!
Quando utilizar a frenagem reostática, a função "Hold de Rampa" ou "Acelera Rampa" deve ser
desabilitada. Consulte a descrição de P0151.
No modo V/f existem dois tipos de função para limitar a tensão do barramento CC:
1 - “Hold de Rampa”:
Tem efeito somente durante a desaceleração.
Forma de atuação: quando a tensão do barramento CC atinge o nível ajustado em P0151 é enviado um
comando ao bloco “rampa”, que inibe a variação da velocidade do motor (“hold de rampa”). Consulte as
figuras 9.10 e 9.11.
Com esta função consegue-se um tempo de desaceleração otimizado (mínimo possível) para a carga
acionada.
Uso recomendado no acionamento de cargas com alto momento de inércia referenciado ao eixo do motor,
ou cargas com média inércia, que exigem rampas de desaceleração curtas.
erro < 0: hold Rampa= inativo
erro ≥ 0: Hold Rampa= ativo
hold Rampa
saída
rampa Acel/Desacel
tensão do
barramento CC(Ud
)
erro
entrada
p0151
Figura 9.10 - Blocodiagrama da função de limitação da tensão do barramento CC utilizando Hold de Rampa](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-104-2048.jpg)






![10-3
10
Controle VVW
10.1 Controle VVW [25]
O grupo de parâmetros [25] – Controle VVW – contém apenas 5 parâmetros relacionados com essa função:
P0139, P0140, P0141, P0202 e P0397.
No entanto, como os parâmetros P0139, P0140, P0141 e P0202 já foram apresentados na seção 9.1 - Controle
V/f, somente o P0397 será descrito a seguir.
P0397 – Compensação de Escorregamento durante a Regeneração
Faixa de
Valores:
0 = Inativa
1 = Ativa
Padrão: 1 = Ativa
Propriedades: CFG e VVW
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
25 Controle VVW
Descrição:
HabilitaoudesabilitaacompensaçãodeescorregamentodurantearegeneraçãonomododecontroleVVW.Consulte
o parâmetro P0138 na seção 9.1 - Controle V/f, para mais detalhes sobre a compensação de escorregamento.
10.2 Dados do Motor [43]
Neste grupo estão relacionados os parâmetros para o ajuste dos dados do motor utilizado. Deve-se ajustá-lo
de acordo com os dados de placa do motor (P0398 a P0406, exceto P0405) e através da rotina de Auto-
Ajuste ou dos dados existentes na folha de dados do motor (demais parâmetros).
Nesta seção serão apresentados apenas os parâmetros P0399 e P0407, os demais são apresentados na
seção 11.7 - Dados do Motor [43].
P0398 – Fator de Serviço do Motor
Para mais informações, consulte a seção 11.7 - Dados do Motor [43].
P0399 – Rendimento Nominal do Motor
Faixa de
Valores:
50.0 a 99.9 Padrão: 67.0
Propriedades: CFG e VVW
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
43 Dados do Motor
Descrição:
Ajuste do rendimento nominal do motor.
Esse parâmetro é importante para o funcionamento preciso do controle VVW. O ajuste impreciso implica no cálculo
incorreto da compensação do escorregamento e, consequentemente, imprecisão no controle de velocidade.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-111-2048.jpg)
![Controle VVW
10-4
10
P0400 – Tensão Nominal do Motor
P0401 – Corrente Nominal do Motor
P0402 – Rotação Nominal do Motor
P0403 – Frequência Nominal do Motor
P0404 – Potência Nominal do Motor
P0406 – Ventilação do Motor
Para mais detalhes, consulte a seção 11.7 - Dados do Motor [43].
P0407 – Fator de Potência Nominal do Motor
Faixa de
Valores:
0.50 a 0.99 % Padrão: 0.68 %
Propriedades: CFG e VVW
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
43 Dados do Motor
Descrição:
Ajuste do fator de potência do motor, conforme a informação contida na placa do mesmo (cos Ø).
Esse parâmetro é importante para o funcionamento do controle VVW. O ajuste impreciso implicará no cálculo
incorreto da compensação do escorregamento.
O valor padrão desse parâmetro é ajustado automaticamente quando o parâmetro P0404 é alterado. O valor
sugerido é válido para motores WEG, trifásicos, IV pólos. Para outros tipos de motores o ajuste deve ser feito
manualmente.
P0408– Fazer Auto-Ajuste
P0409 – Resistência do Estator do Motor (Rs)
P0410 – Corrente de Magnetização do Motor (Im)
Para mais detalhes, consulte o item 11.8.5 - Auto-Ajuste [05] e [94].
10.3 Colocação em Funcionamento no Modo de Controle VVW
NOTA!
Leia todo o manual do usuário CFW-11 antes de instalar, energizar ou operar o inversor.
Sequência para instalação, verificação, energização e colocação em funcionamento:
a) Instale o inversor: de acordo com o capítulo 3 - Instalação e Conexão do manual do usuário CFW-11,
ligando todas as conexões de potência e controle.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-112-2048.jpg)

![Controle VVW
10-6
10
Seq. Ação/Resultado Indicação no display
1
- Modo Monitoração.
- Pressione “Menu”
("soft key" direita).
Ready LOC 0rpm
13:48 Menu
0 rpm
0.0 A
0.0 Hz
2
- O grupo “00
TODOS PARÂMETROS”
já está selecionado.
Ready LOC 0rpm
Sair 13:48 Selec.
00 TODOS PARAMETROS
01 GRUPOS PARAMETROS
02 START-UP ORIENTADO
03 PARAM. ALTERADOS
3
- O grupo “01
GRUPOS PARÂMETROS”
é selecionado.
Ready LOC 0rpm
Sair 13:48 Selec.
00 TODOS PARAMETROS
01 GRUPOS PARAMETROS
02 START-UP ORIENTADO
03 PARAM. ALTERADOS
4
- O grupo “02
start-up orientado” é
então selecionado.
- Pressione “Selec.”.
Ready LOC 0rpm
Sair 13:48 Selec.
00 TODOS PARAMETROS
01 GRUPOS PARAMETROS
02 START-UP ORIENTADO
03 PARAM. ALTERADOS
5
- O parâmetro “Start-up
Orientado P0317: Não”
já está selecionado.
- Pressione “Selec.”.
Ready LOC 0rpm
Sair 13:48 Selec.
Start-Up Orientado
P0317: Nao
6
- O conteúdo de
“P0317 = [000] Não”
é mostrado.
Ready LOC 0rpm
Sair 13:48 Salvar
P0317
Start-up Orientado
[000] Nao
7
-Oconteúdodoparâmetro
é alterado para “P0317 =
[001] Sim”.
- Pressione “Salvar”.
Ready LOC 0rpm
Sair 13:48 Salvar
P0317
Start-up Orientado
[001] Sim
8
- Neste momento é
iniciada a rotina do
Start-up Orientado e
o estado “Config” é
indicado na parte superior
esquerda da HMI.
- O parâmetro “Idioma
P0201: Português” já
está selecionado.
- Se necessário, altere
o idioma pressionando
“Selec.”, em seguida
e
para selecionar o idioma
e depois pressione
“Salvar”.
Config LOC 0rpm
Reset 13:48 Selec.
Idioma
P0201: Portugues
Tipo de Controle
P0202: V/F 60Hz
Seq. Ação/Resultado Indicação no display
9
- Ajuste o conteúdo de
P0202 pressionando
“Selec.”.
- Em seguida pressione
até selecionar
a opção ”[005] VVW”,
e depois pressione
“Salvar”.
Config LOC 0rpm
Reset 13:48 Selec.
Idioma
P0201: Portugues
Tipo de Controle
P0202: V/F 60Hz
Config LOC 0rpm
Sair 13:48 Salvar
P0202
Tipo de Controle
[005] VVW
10
- Se necessário, altere o
conteúdo de P0296 de
acordo com a tensão de
rede utilizada . Para isto,
pressione “Selec.”. Esta
alteração afetará P0151,
P0153, P0185, P0321,
P0322, P0323 e P0400.
Config LOC 0rpm
Reset 13:48 Selec.
Tipo de Controle
P0202: VVW
Tensao Nominal Rede
P0296: 440 - 460 V
11
- Se necessário, mude o
conteúdo de P0298 de
acordo com a aplicação
do inversor. Para isso,
pressione “Selec.”. Esta
alteração afetará P0156,
P0157, P0158, P0401 e
P0404. O tempo e o nível
de atuação da proteção
de sobrecarga nos IGBTs
também serão afetados
Config LOC 0rpm
Reset 13:48 Selec.
Tensao Nominal Rede
P0296: 440 - 460 V
Aplicacao
P0298: Uso Normal (ND)
12
- Se necessário, ajuste o
conteúdo de P0398 de
acordo com o fator de
serviço do motor. Para
isso, pressione “Selec.”.
Esta alteração afetará
o valor de corrente e o
tempo de atuação da
função de sobrecarga do
motor.
Config LOC 0rpm
Reset 13:48 Selec.
Aplicacao
P0298: Uso Normal (ND)
Fator Servico Motor
P0398: 1.15
13
- Se necessário, ajuste o
conteúdo de P0399 de
acordo com o rendimento
nominal do motor. Para
isso, pressione “Selec.”.
Config LOC 0rpm
Reset 13:48 Selec.
Fator Sevico Motor
P0398: 1.15
Rendimento Nom. Motor
P0399: 67.0 %
Figura 10.2 - Start-up Orientado do modo VVW](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-114-2048.jpg)
![10-7
10
Controle VVW
Seq. Ação/Resultado Indicação no display
14
- Se necessário, ajuste
o conteúdo de P0400
de acordo com a tensão
nominal do motor. Para
isto, pressione “Selec.”.
Esta alteração corrige a
tensão de saída pelo fator
x = P0400/P0296.
Config LOC 0rpm
Reset 13:48 Selec.
Rendimento Nom. Motor
P0399: 67.0 %
Tensao Nom. Motor
P0400: 440 V
15
- Se necessário, ajuste
P0401 de acordo com
a corrente nominal do
motor. Para isto, pressione
“Selec.”. Esta alteração
afetará P0156, P0157,
P0158 e P0410.
Config LOC 0rpm
Reset 13:48 Selec.
Tensao Nominal Motor
P0400: 440V
Corrente Nom. Motor
P0401: 13.5 A
16
- Se necessário, ajuste
P0402 de acordo com
a rotação nominal do
motor. Para isso, pressione
“Selec.”. Esta alteração
afeta P0122 a P0131,
P0133, P0134, P0182,
P0208, P0288 e P0289.
Config LOC 0rpm
Reset 13:48 Selec.
Corrente Nom. Motor
P0401: 13.5A
Rotacao Nom. Motor
P0402: 1750 rpm
17
- Se necessário, ajuste
P0403 de acordo com
a frequência nominal do
motor. Para isso, pressione
“Selec.”.
Config LOC 0rpm
Reset 13:08 Selec.
Rotacao Nom. Motor
P0402: 1750 rpm
Frequencia Nom. Motor
P0403: 60 Hz
18
- Se necessário, altere o
conteúdo de P0404 de
acordo com a potência
nominal do motor. Para
isso, pressione “Selec.”.
Esta alteração afeta
P0410.
Config LOC 0rpm
Reset 13:48 Selec.
Frequencia Nom.Motor
P0403: 60 Hz
Potencia Nom. Motor
P0404: 7.5 CV
19
- Se necessário, altere
P0406 de acordo com
o tipo de ventilação do
motor. Para isso, pressione
“Selec.”.
Esta alteração afetará
P0156, P0157, P0158,
P0399, e P0407.
Config LOC 0rpm
Reset 13:48 Selec.
Potencia Nom. Motor
P0404: 7.5 CV
Ventilacao do Motor
P0406: Autoventilado
Seq. Ação/Resultado Indicação no display
20
- Se necessário, altere
P0407 de acordo com o
fator de potência nominal
do motor. Para isto,
pressione “Selec.”.
Config LOC 0rpm
Reset 13:48 Selec.
Ventilacao do Motor
P0406: AutoVentilado
Fator Pot. Nom. Motor
P0407: 0.68
21
- Nesse ponto, a HMI
apresenta a opção de fazer
“Auto-Ajuste”. Sempre que
possível, deve-se fazer o
Auto-Ajuste.
- Assim, pressione
“Selec.” para acessar
o parâmetro P0408 e
depois para
selecionar a opção
“[001] Sem Girar”.
Consulte o item 11.8.5
- Auto-Ajuste [05] e [94],
para mais detalhes.
-Em seguida pressione
“Salvar”.
Config LOC 0rpm
Reset 13:09 Selec.
Fator Pot.Nom. Motor
P0407: 0.68
Fazer Auto-Ajuste
P0408: Nao
Ready LOC 0rpm
Sair 13:48 Salvar
P0408
Fazer Auto-Ajuste
[001] Sem Girar
22
- Feito isso é iniciada a
rotina do Auto-Ajuste
e o estado “Aajuste” é
indicado na parte superior
esquerdo da HMI.
- A HMI iniciará a rotina
apresentando “P0409:
Estimando Rs”.
Aguarde o término da
rotina de Auto-Ajuste.
Aajuste LOC 0rpm
13:48
P0409
Estimando Rs
23
- Uma vez terminada a
rotina de Auto-Ajuste,
o inversor volta para o
Modo de Monitoração e
está pronto para operar.
Ready LOC 0rpm
13:48 Menu
0 rpm
0.0 A
0.0 Hz
Figura 10.2 (cont.) - Start-up Orientado do modo VVW](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-115-2048.jpg)






![Controle Vetorial
11-6
11
NOTA!
Sempre que P0408=1 ou 2 o parâmetro P0413 (Constante de tempo mecânica Tm
) será ajustado
para um valor aproximado da constante de tempo mecânica do rotor do motor. Para isto, leva-se em
consideração a inércia do rotor do motor (dados de tabela válidos para motores WEG), a Corrente
e a Tensão Nominal do inversor.
P0408=2 (Gira para Im
) no modo vetorial com encoder (P0202 = 4): após concluir a rotina de
Auto-ajuste, acople a carga ao motor e faça P0408=4 (Medir Tm
). Neste caso P0413 será estimado
levando em conta também a carga acionada.
Se a opção P0408=2 (Gira para Im
) for realizada com a carga acoplada ao motor, poderá ser
estimado um valor errado de P0410 (Im
). Isto implicará em erro nas estimações de P0412 (Constante
rotórica - Tr
) e de P0413 (Constante de tempo mecânica -Tm
). Também, poderá ocorrer falha de
sobrecorrente (F071) durante a operação do inversor.
Obs: O termo “carga” engloba tudo que esteja acoplado ao eixo do motor, por exemplo, redutor,
disco de inércia, etc.
Na opção P0408=4 (Medir Tm
) a rotina de Auto-Ajuste estima somente o valor de P0413 (constante
de tempo mecânica - Tm
), com o motor girando. Deve ser feito, de preferência, com a carga acoplada
ao motor.
Durante a sua execução a rotina de Auto-ajuste é cancelada pressionando-se a tecla desde
que P0409 a P0413 sejam todos diferentes de zero.
Para mais detalhes sobre os parâmetros do Auto-Ajuste consulte o item 11.8.5 - Auto-Ajuste [05] e [94], deste
manual.
Alternativas para obtenção dos parâmetros do motor:
Ao invés de rodar o Auto-Ajuste é possível, obter os valores de P0409 a P0412 da seguinte forma:
- A partir da folha de dados de ensaio do motor, a qual pode ser fornecida pelo fabricante do mesmo.
Consulte o item 11.7.1 - Ajuste dos Parâmetros P0409 a P0412 a Partir da Folha de Dados do Motor,
deste manual.
- Manualmente, copiando o conteúdo dos parâmetros de outro inversor CFW-11 que utiliza motor idêntico.
11.4 flUXO ÓTIMO PARA CONTROlE vETORIAl SENSORlESS
NOTA!
Função ativa apenas no modo de controle vetorial sensorless (P0202=3), se P0406=2.
A função de Fluxo Ótimo pode ser utilizada no acionamento de alguns tipos de motores WEG (*)
permitindo a
operação em baixas velocidades com torque nominal sem a necessidade de ventilação forçada no motor. A
faixa de frequência de operação é de 12:1, ou seja, de 5 Hz a 60 Hz para motores com frequência nominal
de 60 Hz e de 4.2 Hz a 50 Hz para motores com frequência nominal de 50 Hz.
NOTA!
(*) Motores WEG que podem ser utilizados com a função de Fluxo Ótimo: Nema Premium Efficiency,
Nema High Efficiency, IEC Premium Efficiency, IEC Top Premium Efficiency e Alto Rendimento Plus.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-122-2048.jpg)

![Controle Vetorial
11-8
11
Ajustes para controle de torque:
Limitação de torque:
1. Via parâmetros P0169, P0170 (pela HMI, Serial ou Fieldbus). Consulte o item 11.8.6 - Limitação Corrente
Torque [95];
2. Pelas entradas analógicas AI1, AI2, AI3 ou AI4. Consulte o item 13.1.1 - Entradas Analógicas, opção 2
(máxima corrente de torque);
Referência de velocidade:
3. Ajuste a referência de velocidade 10%, ou mais, acima da velocidade de trabalho. Isso garante que a
saída do regulador de velocidade fique saturada no valor máximo permitido pelo ajuste de limite de
torque.
NOTA!
A limitação de torque com o regulador de velocidade saturado, também tem a função de proteção
(limitação). Por exemplo: para um bobinador, na situação em que o material em bobinamento rompe,
o regulador sai da condição de saturado e passa a controlar a velocidade do motor, a qual estará
no valor fornecido pela referência de velocidade.
11.6 Frenagem Ótima
NOTA!
Somente ativa nos modos de Controle Vetorial (P0202=3 ou 4), quando P0184=0, P0185 for
menor que o valor padrão e P0404<21(75 CV).
NOTA!
A atuação da frenagem ótima pode causar no motor:
- aumento no nível de vibração;
- aumento do ruído acústico;
- aumento da temperatura;
Verificar o impacto destes efeitos na aplicação antes de utilizar a frenagem ótima.
Função que auxilia na frenagem controlada do motor, eliminando, em muitos casos, a necessidade de IGBT
e resistor de frenagem adicionais.
A Frenagem Ótima possibilita a frenagem do motor com torque maior do que aquele obtido com métodos
tradicionais, como por exemplo, a frenagem por injeção de corrente contínua (frenagem CC). No caso da
frenagem por corrente contínua somente as perdas no rotor do motor são utilizadas para dissipar a energia
armazenada na inércia da carga mecânica acionada, desprezando-se as perdas totais por atrito. Já no caso
da Frenagem Ótima, tanto as perdas totais no motor, quanto as perdas totais no inversor, são utilizadas.
Consegue-se torque de frenagem aproximadamente 5 vezes maior do que com frenagem CC.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-124-2048.jpg)

![Controle Vetorial
11-10
11
Exemplos: 1 CV/0.75 kW, IV pólos: η=0.76 que resulta em TB1=0.32;
20 CV/15.0 kW, IV pólos: η=0.86 que resulta em TB1=0.16.
T
Tnom
N
nnom
TB1
1.0
0
0 0.2 1.0 2.0
(c)
(b)
(a)
Figura 11.3 - Curva T x N para Frenagem Ótima e motor típico de 10 CV/7.5 kW, acionado por inversor com limite de torque
ajustado para um valor igual ao torque nominal do motor
(a) Torque gerado pelo motor em operação normal, acionado pelo inversor no “modo motor” (torque resistente
de carga).
(b) Torque de frenagem gerado pelo uso da Frenagem Ótima.
(c) Torque de frenagem gerado pelo uso da Frenagem CC.
Para uso da Frenagem Ótima:
a) Ative a frenagem ótima fazendo P0184=0 (modo regulação Ud
=com perdas) e ajuste o nível de regulação
do barramento CC em P0185, conforme apresentado no item 11.8.7 - Regulador do Barramento CC, com
P0202=3 ou 4 e P0404 menor que 21 (75.0 CV).
b) Para habilitar e desabilitar a Frenagem Ótima via entrada digital, programe uma das entradas (DIx) para
“Regulador Barramento CC.” (P0263 ... P0270=25 e P0184=2).
Resulta:
DIx=24 V (fechada): Frenagem Ótima ativa, equivalente à P0184=0.
DIx=0 V (aberta): Frenagem Ótima inativa.
11.7 Dados do Motor [43]
Neste grupo, estão relacionados os parâmetros para o ajuste dos dados do motor utilizado. Ajustá-los de
acordo com os dados de placa do motor (P0398 a P0406), exceto P0405, e através da rotina de Auto-Ajuste
ou dos dados existentes na folha de dados do motor (demais parâmetros). No modo Controle Vetorial não
são utilizados os parâmetros P0399 e P0407.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-126-2048.jpg)



![Controle Vetorial
11-14
11
P0406 – Ventilação do Motor
Faixa de
Valores:
0 = Autoventilado
1 = Independente
2 = Fluxo Ótimo
3 = Proteção Estendida
Padrão: 0
Propriedades: CFG
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
43 Dados do Motor
Descrição:
Na rotina de Start-up Orientado o valor ajustado em P0406 modifica automaticamente os parâmetros relacionados
à proteção de sobrecarga no motor da seguinte forma:
Tabela 11.2 - Alteração da proteção de sobrecarga do motor em função de P0406
P0406 P0156 (Corr. Sobrec. 100 %) P0157 (Corr. Sobrec. 50 %) P0158 (Corr. Sobrec. 5 %)
0 1.05xP0401 0.9xP0401 0.65xP0401
1 1.05xP0401 1.05xP0401 1.05xP0401
2 1.05xP0401 1.0xP0401 1.0xP0401
3 0.98xP0401 0.9xP0401 0.55xP0401
ATENÇÃO!
Para mais detalhes consulte na seção 11.4 - Fluxo Ótimo para Controle Vetorial Sensorless, para
utilização da opção P0406=2 (Fluxo Ótimo).
P0407 – Fator de Potência Nominal do Motor
Para mais detalhes, consulte a seção 10.2 - Dados do Motor [43].
P0408 – Fazer Auto-Ajuste
P0409 – Resistência do Estator do Motor (Rs)
P0410 – Corrente de Magnetização do Motor (Im)
P0411 – Indutância de Dispersão de Fluxo do Motor (σls)
P0412 – Constante Lr/Rr (Constante de Tempo Rotórica do Motor – Tr)
P0413 – Constante Tm (Constante de Tempo Mecânico)
Parâmetros da função Auto-Ajuste. Consulte o item 11.8.5 - Auto-Ajuste [05] e [94].](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-130-2048.jpg)
![11-15
11
Controle Vetorial
11.7.1 Ajuste dos Parâmetros P0409 a P0412 a partir da Folha de Dados do Motor
De posse dos dados do circuito equivalente do motor é possível calcular o valor a ser programado nos
parâmetros P0409 a P0412, ao invés de utilizar o Auto-Ajuste para obtê-los.
Dados de entrada:
Folha de dados do motor:
Vn
= tensão nominal informada nos dados do motor em Volts;
fn
= frequência nominal informada nos dados do motor em Hz;
R1
= resistência do estator do motor por fase em Ohms;
R2
= resistência do rotor do motor por fase em Ohms;
X1
= reatância indutiva do estator em Ohms;
X2
= reatância indutiva do rotor em Ohms;
Xm
= reatância indutiva de magnetização em Ohms;
Io
= corrente do motor a vazio;
ω = velocidade angular.
ω =2 x π x fn
P0409 =
P0400 x R1
Vn
P0410 =
Vn
x Io
x 0.95
P0400
P0411 =
P0400 x [X1
+(X2
x Xm
)/(X2
+ Xm
)]
Vn
x ω
P0412 =
P0400 x (Xm
+ X2
)
Vn
x ω x R2](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-131-2048.jpg)
![Controle Vetorial
11-16
11
11.8 Controle Vetorial [29]
11.8.1 Regulador de Velocidade [90]
Neste grupo são apresentados os parâmetros relacionados ao regulador de velocidade do CFW-11.
P0160 – Configuração do Regulador de Velocidade
Faixa de
Valores:
0 = Normal
1 = Saturado
Padrão: 0 = Normal
Propriedades: CFG, PM e Vetorial
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
29 Controle Vetorial
90 Regulador Veloc.
Descrição:
Ajustar P0160=1 nas aplicações que se deseja um controle de torque estável, como em um processo de
bobinamento de materiais; nesses casos a referência de velocidade é mantida sempre maior que o valor da
realimentação de velocidade, com o objetivo de saturar o regulador de velocidade, isto é, manter a sua saída
igual ao valor ajustado em P0169 ou P0170 durante o processo.
Se utilizado para controle de velocidade pode ocorrer F022, mesmo quando a regulação da tensão do barramento
CC estiver ativa (P0185 < valor padrão).
P0161 – Ganho Proporcional do Regulador de Velocidade
Faixa de
Valores:
0.0 a 63.9 Padrão: 7.0
P0162 – Ganho Integral do Regulador de Velocidade
Faixa de
Valores:
0.000 a 9.999 Padrão: 0.005
Propriedades: PM e Vetorial
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
29 Controle Vetorial
90 Regulador Veloc.
Descrição:
Os ganhos do regulador de velocidade são calculados automaticamente em função do parâmetro P0413
(Constante Tm
). Alterando-se P0413, os parâmetros P0161 e P0162 são modificados proporcionalmente.
Entretanto, esses ganhos podem ser ajustados manualmente para otimizar a resposta dinâmica de velocidade.
O ganho Proporcional (P0161) estabiliza mudanças bruscas de velocidade ou referência, enquanto o ganho
Integral (P0162) corrige o erro entre referência e velocidade, bem como melhora a resposta em torque a baixas
velocidades.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-132-2048.jpg)


![11-19
11
Controle Vetorial
11.8.2 Regulador de Corrente [91]
Neste grupo aparecem os parâmetros relacionados ao regulador de corrente do CFW-11.
P0167 – Ganho Proporcional do Regulador de Corrente
Faixa de
Valores:
0.00 a 1.99 Padrão: 0.50
P0168 – Ganho Integral do Regulador de Corrente
Faixa de
Valores:
0.000 a 1.999 Padrão: 0.010
Propriedades: Vetorial
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
29 Controle Vetorial
91 Regulador Corrente
Descrição:
Os parâmetros P0167 e P0168 são automaticamente ajustados em função dos parâmetros P0411 e P0409,
respectivamente.
NOTA!
Em geral esses parâmetros não necessitam de reajuste. Porém quando o ajuste de P0296 for maior
que o ajuste de P0400 ou a tensão do barramento CC é controlada por um AFE (Active Front End),
poderá ocorrer instabilidade na corrente. Nestes casos recomenda-se reduzir o valor do parâmetro
P0167.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-135-2048.jpg)
![Controle Vetorial
11-20
11
11.8.3 Regulador de Fluxo [92]
Os parâmetros relacionados ao regulador de fluxo do CFW-11 são apresentados a seguir.
P0175 – Ganho Proporcional do Regulador de Fluxo
Faixa de
Valores:
0.0 a 31.9 Padrão: 2.0
P0176 – Ganho Integral do Regulador de Fluxo
Faixa de
Valores:
0.000 a 9.999 Padrão: 0.020
Propriedades: Vetorial
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
29 Controle Vetorial
92 Regulador Fluxo
Descrição:
Esses parâmetros são ajustados automaticamente em função do parâmetro P0412. Em geral, o ajuste automático
é suficiente e não é necessário o reajuste.
Esses ganhos somente devem ser reajustados manualmente quando o sinal da corrente de excitação (Id*) estiver
instável (oscilando) e comprometendo o funcionamento do sistema.
NOTA!
Para ganhos P0175 > 12.0, a corrente de excitação (Id*) pode ficar instável.
Obs.:
(Id*) é observada nas saídas AO3 e/ou AO4, ajustando P0257=22 e/ou P0260=22.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-136-2048.jpg)
![11-21
11
Controle Vetorial
P0178 – Fluxo Nominal
Faixa de
Valores:
0 a 120 % Padrão: 100 %
P0179 – Fluxo Máximo
Faixa de
Valores:
0 a 120 % Padrão: 120 %
Propriedades: Vetorial
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
29 Controle Vetorial
92 Regulador Fluxo
Descrição:
O parâmetro P0178 é a referência de fluxo, enquanto o parâmetro P0179 define o valor máximo da corrente de
exitação (magnetização).
NOTA!
Esses parâmetros não devem ser modificados.
P0181 – Modo de Magnetização
Faixa de
Valores:
0 = Habilita Geral
1 = Gira/Pára
Padrão: 0 = Habilita
Geral
Propriedades: CFG e Encoder
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
29 Controle Vetorial
92 Regulador Fluxo
Descrição:
Tabela 11.4 - Modo de magnetização
P0181 Ação
0 = Habilita Geral Aplica corrente de magnetização após Habilita Geral ON
1 = Gira/Pára Aplica corrente de magnetização após Gira/Para=Gira
No modo de controle vetorial sensorless, a corrente de magnetização está permanentemente ativa. Para desabilitá-la
quando o motor está parado, pode ser utilizada uma entrada digital para habilita geral, existe também a possibilidade
de programar P0217 em 1 (ativo) , consulte a seção 12.6 - Lógica de Parada [35]. Além disso, pode-se dar um
atraso de tempo para desabilitar a corrente de magnetização, programando P0219 maior que zero.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-137-2048.jpg)

![11-23
11
Controle Vetorial
11.8.4 Controle I/f [93]
P0182 – Velocidade para Atuação do Controle I/f
Faixa de
Valores:
0 a 90 rpm Padrão: 18 rpm
Propriedades: Sless
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
29 Controle Vetorial
93 Controle I/f
Descrição:
Define a velocidade abaixo da qual ocorre a transição de controle vetorial sensorless para I/f.
A velocidade mínima recomendada para operação do controle vetorial sensorless é de 18 rpm para motores com
frequência nominal de 60 Hz e 4 pólos e de 15 rpm para motores com 4 pólos com frequência nominal de 50 Hz.
NOTA!
Para P0182 ≤ 3 rpm a função I/f será desativada, e o inversor irá atuar sempre no modo vetorial
sensorless.
P0183 – Corrente no Modo I/f
Faixa de
Valores:
0 a 9 Padrão: 1
Propriedades: Sless
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
29 Controle Vetorial
93 Controle I/f
Descrição:
Define a corrente a ser aplicada no motor quando o inversor está atuando no modo I/f isto é, com velocidade do
motor abaixo do valor definido pelo parâmetro P0182.
Tabela 11.5 - Corrente aplicada no modo I/f
P0183 Corrente no modo I/f em percentual de P0410 (Im)
0 100 %
1 120 %
2 140 %
3 160 %
4 180 %
5 200 %
6 220 %
7 240 %
8 260 %
9 280 %](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-139-2048.jpg)
![Controle Vetorial
11-24
11
11.8.5 Auto-Ajuste [05] e [94]
Nesse grupo se encontram os parâmetros relacionados ao motor e que podem ser estimados pelo inversor
durante a rotina de Auto-Ajuste.
P0408 – Fazer Auto-Ajuste
Faixa de
Valores:
0 = Não
1 = Sem girar
2 = Girar para Im
3 = Girar para Tm
4 = Estimar Tm
Padrão: 0 = Não
Propriedades: CFG, Vetorial e VVW
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS 05 Auto-Ajuste
29 Controle Vetorial ou
94 Auto-Ajuste
NOTA!
Os comandos via Rede de Comunicação, SoftPLC e PLC11 ficam inativos durante o Auto-Ajuste.
Descrição:
Modificando-se o valor padrão desse parâmetro para uma das 4 opções disponíveis, é possível estimar os valores
dos parâmetros relacionados ao motor em uso. Veja a descrição a seguir para mais detalhes de cada opção.
Tabela 11.6 - Opções do Auto-Ajuste
P0408 Auto-Ajuste Tipo de Controle Parâmetros Estimados
0 Não – –
1 Sem girar Vetorial sensorless, com encoder ou VVW
P0409, P0410, P0411,
P0412 e P0413
2 Girar p/ Im
Vetorial sensorless ou com encoder
3 Girar p/ Tm
Vetorial com encoder
4 Estimar Tm
Vetorial com encoder P0413
P0408=1 – Sem girar: O motor permanece parado durante o auto-ajuste. O valor de P0410 é obtido de uma
tabela, válida para os motores WEG até 12 pólos.
NOTA!
Para isso, P0410 deve estar igual a zero antes de iniciar o Auto-Ajuste. Se P0410≠0, a rotina de
Auto-Ajuste manterá o valor existente.
Obs.: Ao usar outra marca de motor, deve-se ajustar P0410 com o valor adequado (corrente com motor à
vazio) antes de iniciar o Auto-Ajuste.
P0408=2 – Girar para Im
: O valor de P0410 é estimado com o motor girando. Deve ser executado sem carga
acoplada ao motor. P0409, P0411 a P0413 são estimados com o motor parado.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-140-2048.jpg)




![11-29
11
Controle Vetorial
11.8.6 Limitação Corrente Torque [95]
Os parâmetros colocados nesse grupo definem os valores de limitação de torque.
P0169 – Máxima Corrente de Torque "+"
P0170 – Máxima Corrente de Torque "-"
Faixa de
Valores:
0.0 a 350.0 % Padrão: 125.0 %
Propriedades: PM e Vetorial
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
29 Controle Vetorial
95 Lim. Corr. Torque
Descrição:
Estes parâmetros limitam o valor da componente da corrente do motor que produz torque "+" (P0169) ou torque
"-" (P0170). O ajuste é expresso em percentual da corrente de torque nominal do motor.
O torque positivo ocorre quando o motor aciona a carga no sentido de giro horário, ou a carga aciona o motor
no sentido de giro anti-horário. O torque negativo ocorre quando o motor aciona a carga no sentido de giro
anti-horário, ou a carga aciona o motor no sentido de giro horário.
Se P0169 ou P0170 for ajustado muito baixo, poderá não haver torque suficiente para o motor acionar a carga.
Se o valor ajustado nos parâmetros for muito alto pode ocorrer falha de sobrecarga ou sobre-corrente.
Caso alguma Entrada Analógica (AIx) esteja programada para a opção 2 (Máxima Corrente de Torque), P0169
e P0170 ficam inativos e a limitação de corrente será dada pela AIx. Neste caso o valor da limitação poderá ser
monitorado no parâmetro correspondente à AIx programada (P0018...P0021).
NOTA!
O máximo valor que esses parâmetros podem assumir é limitado internamente em 1.8 x P0295 (HD).
Na condição de limitação de torque a corrente do motor pode ser calculada por:
+ (P0410)2p0169 ou p0170(*)
x P0401
100
2
Imotor
=
O torque máximo desenvolvido pelo motor é dado por:
Tmotor
(%)=
P0401 x P0169(*)
ou P0170
100
x100
(P0401)2
- P0410 x P0178 2
100
(*) Caso a limitação de corrente de torque seja fornecida por entrada analógica, substituir P0169 ou P0170
por P0018, P0019, P0020 ou P0021 de acordo com a AIx programada. Para mais detalhes consulte o item
13.1.1 - Entradas Analógicas [38].
Para as aplicações de controle de torque são fornecidas na seção 11.5 - Controle de Torque, algumas recomendações
de ajuste de P0169 e P0170.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-145-2048.jpg)

![11-31
11
Controle Vetorial
11.8.7 Regulador do Barramento CC [96]
Para a desaceleração de cargas de alta inércia ou com tempos de desaceleração pequenos, o CFW-11 dispõe
da função Regulador do Barramento CC, que evita o bloqueio do inversor por sobretensão no barramento
CC (F022).
P0184 – Modo de Regulação da Tensão CC
Faixa de
Valores:
0 = Com perdas
1 = Sem perdas
2 = Habilita/Desabilita via DIx
Padrão: 1 = Sem
perdas
Propriedades: CFG, PM e Vetorial
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
29 Controle Vetorial
96 Regulador Barr. CC
Descrição:
Habilita ou desabilita a função da seção 11.6 Frenagem Ótima na regulação da tensão CC, conforme tabela a
seguir.
Tabela 11.8 - Modos de regulação da tensão CC
P0184 Ação
0 = Com perdas
(Frenagem Ótima)
A Frenagem Ótima está ativa como descrito em P0185. Isto dá o menor tempo de desaceleração
possível sem utilizar a frenagem reostática ou regenerativa
1 = Sem perdas
Controle da rampa de desaceleração automática. A Frenagem Ótima está inativa. A rampa
de desaceleração é automaticamente ajustada para manter o barramento CC abaixo do nível
ajustado no P0185. Este procedimento evita a falha por sobretensão no barramento CC (F022).
Também pode ser usado com cargas excêntricas
2 = Habilita/desabilita via DIx
DIx=24 V: A frenagem atua conforme descrito para P0184=1
DIx=0 V: A Frenagem Sem Perdas fica inativa. A tensão do barramento CC será controlada
pelo parâmetro P0153 (Frenagem Reostática)
P0185 – Nível de Atuação da Regulação da Tensão do Barramento CC
Faixa de
Valores:
339 a 400 V
585 a 800 V
585 a 800 V
585 a 800 V
585 a 800 V
809 a 1000 V
809 a 1000 V
924 a 1200 V
924 a 1200 V
Padrão: P0296 = 0 : 440 V
P0296 = 1 : 800 V
P0296 = 2 : 800 V
P0296 = 3 : 800 V
P0296 = 4 : 800 V
P0296 = 5 : 1000 V
P0296 = 6 : 1000 V
P0296 = 7 : 1000 V
P0296 = 8 : 1200 V
Propriedades: Vetorial
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
29 Controle Vetorial
96 Regulador Barr. CC](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-147-2048.jpg)

![11-33
11
Controle Vetorial
11.9 Colocação em Funcionamento nos Modos de Controle Vetorial
Sensorless e com Encoder
NOTA!
Leia todo o manual do usuário CFW-11 antes de instalar, energizar ou operar o inversor.
Sequência para instalação, verificação, energização e colocação em funcionamento:
a) Instale o inversor: de acordo com o Capítulo 3 - Instalação e Conexão do manual do usuário CFW-11,
ligando todas as conexões de potência e controle.
b) Prepare o acionamento e energize o inversor: de acordo com a seção 5.1 - Preparação e Energização, do
manual do usuário CFW-11.
c) Ajuste a senha P0000=5: de acordo com a seção 5.3 - Ajuste da Senha em P0000, deste manual.
d) Ajuste o inversor para operar com a rede e o motor da aplicação: através do Menu “Start-up Orientado”
acesse P0317 e altere o seu conteúdo para 1, o que faz o inversor iniciar a sequência de Start-up Orientado.
A rotina de Start-up Orientado apresenta na HMI os principais parâmetros em uma sequência lógica. O ajuste
destes parâmetros prepara o inversor para operação com a rede e motor da aplicação. Veja a sequência passo a
passo na figura 11.6.
O ajuste dos parâmetros apresentados neste modo de funcionamento resulta na modificação automática do
conteúdo de outros parâmetros e/ou variáveis internas do inversor, conforme indicado na figura 11.6. Desta forma
obtém-se uma operação estável do circuito de controle com valores adequados para obter o melhor desempenho
do motor.
Durante a rotina de Start-up Orientado será indicado o estado “Config” (Configuração) no canto superior esquerdo
da HMI.
Parâmetros relacionados ao motor:
Programe o conteúdo dos parâmetros P0398, P0400 a P0406 diretamente dos dados de placa do motor.
Opções para ajuste dos parâmetros P0409 a P0412:
- Automático pelo inversor executando a rotina de Auto-Ajuste selecionada em uma das opções de P0408.
- A partir de folha de dados de ensaio do motor fornecida pelo fabricante. Consulte este procedimento no
item11.7.1 - Ajuste dos parâmetros P0409 a P0412 a partir da folha de Dados do Motor deste manual.
- Manualmente, copiando o conteúdo dos parâmetros de outro inversor CFW-11 que utiliza motor idêntico.
e) Ajuste de parâmetros e funções específicos para a aplicação: programe as entradas e saídas digitais
e analógicas, teclas da HMI, etc., de acordo com as necessidades da aplicação.
Para aplicações:
Simples, que podem utilizar as entradas e saídas digitais e analógicas programadas com valores padrão
de fábrica, utilizando o Menu [04] “Aplicação Básica”. Consulte o item 5.2.3 - Ajuste dos Parâmetros da
Aplicação Básica, do manual do usuário CFW-11.
Que necessitem somente das entradas e saídas digitais e analógicas com programação diferente do
padrão de fábrica, utilize o Menu [07] “Configuração I/O”.
Que necessitem de funções como Flying Start, Ride-Through, Frenagem CC, Frenagem Reostática, etc.,
acesse e modifique os parâmetros destas funções através do Menu [01] “Grupos de Parâmetros”.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-149-2048.jpg)
![Controle Vetorial
11-34
11
Seq. Ação/Resultado Indicação no display
1
- Modo Monitoração.
- Pressione “Menu”
("soft key" direita).
Ready LOC 0rpm
13:48 Menu
0 rpm
0.0 A
0.0 Hz
2
- O grupo “00
TODOS PARÂMETROS” já
está selecionado.
Ready LOC 0rpm
Sair 13:48 Selec.
00 TODOS PARAMETROS
01 GRUPOS PARAMETROS
02 START-UP ORIENTADO
03 PARAM. ALTERADOS
3
- O grupo “01
GRUPOS PARÂMETROS”
é selecionado.
Ready LOC 0rpm
Sair 13:48 Selec.
00 TODOS PARAMETROS
01 GRUPOS PARAMETROS
02 START-UP ORIENTADO
03 PARAM. ALTERADOS
4
- O grupo “02
START-UP ORIENTADO” é
então selecionado.
- Pressione “Selec.”.
Ready LOC 0rpm
Sair 13:48 Selec.
00 TODOS PARAMETROS
01 GRUPOS PARAMETROS
02 START-UP ORIENTADO
03 PARAM. ALTERADOS
5
- O parâmetro “Start-up
Orientado P0317: Não” já
está selecionado.
- Pressione “Selec.”.
Ready LOC 0rpm
Sair 13:48 Selec.
Start-Up Orientado
P0317: Nao
6
- O conteúdo de
“P0317 = [000] Não”
é mostrado.
Ready LOC 0rpm
Sair 13:48 Salvar
P0317
Start-up Orientado
[000] Nao
7
- O conteúdo do parâmetro
é alterado para “P0317 =
[001] Sim”.
- Pressione “Salvar”.
Ready LOC 0rpm
Sair 13:48 Salvar
P0317
Start-up Orientado
[001] Sim
8
- Neste momento é iniciada
a rotina do
Start-up Orientado e o
estado “Config” é indicado
na parte superior esquerda
da HMI.
- O parâmetro “Idioma
P0201: Português” já está
selecionado.
- Se necessário, mude
o idioma pressionando
“Selec.”, em seguida
e
para selecionar o idioma e
depois pressione “Salvar”.
Config LOC 0rpm
Reset 13:48 Selec.
Idioma
P0201: Portugues
Tipo de Controle
P0202: V/F 60Hz
Seq. Ação/Resultado Indicação no display
9
- Ajuste o conteúdo de
P0202 pressionando
“Selec.”.
- Em seguida pressione
até selecionar a
opção desejada: "[003]
Sensorless ou [004]
Encoder". Essa alteração
zera o conteúdo de P0410.
- Depois pressione "Salvar".
- Observe que a partir deste
momento as opções "Reset"
("Soft Key" esquerda)
ou
"Soft Key"
não estão mais
disponíveis.
- Para sair do Start-up
Orientado há 3 opções:
1- Executando o Auto-Ajuste;
2 - Ajustando manualmente
os parâmetros P0409 até
P0413;
3 - Alterando P0202 de
vetorial para escalar.
Config LOC 0rpm
Reset 13:48 Selec.
Idioma
P0201: Portugues
Tipo de Controle
P0202: V/F 60Hz
10
- Se necessário, altere o
conteúdo de P0296 de
acordo com a tensão de
rede utilizada . Para isto,
pressione “Selec.”. Esta
alteração afetará P0151,
P0153, P0185, P0190,
P0321, P0322, P0323 e
P0400.
Config LOC 0rpm
Reset 13:48 Selec.
Tipo de Controle
P0202: Sensorless
Tensao Nominal Rede
P0296: 440 - 460 V
11
- Se necessário, altere o
conteúdo de P0298 de
acordo com a aplicação do
inversor. Para isto, pressione
“Selec.”. Esta alteração
afetará P0156, P0157,
P0158, P0169, P0170,
P0401 e P0404. O tempo
e o nível de atuação da
proteção de sobrecarga
nos IGBTs serão também
afetados.
Config LOC 0rpm
Reset 13:48 Selec.
Tensao Nominal Rede
P0296: 440 - 460 V
Aplicacao
P0298: Uso Normal (ND)
12
- Se necessário, ajuste o
conteúdo de P0398 de
acordo com o fator de
serviço do motor. Para isso,
pressione “Selec.”. Esta
alteração afetará o valor
de corrente e o tempo
de atuação da função de
sobrecarga do motor.
Config LOC 0rpm
Reset 13:48 Selec.
Aplicacao
P0298: Uso Normal (ND)
Fator Servico Motor
P0398: 1.15
Figura 11.6 - Start-up Orientado do modo vetorial](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-150-2048.jpg)
![11-35
11
Controle Vetorial
Seq. Ação/Resultado Indicação no display
13
Se necessário, ajuste o
conteúdo de P0400 de
acordo com a tensão
nominal do motor. Para
isto, pressione “Selec.”.
Esta alteração afetará
P0190.
Config LOC 0rpm
Reset 13:48 Selec.
Fator Sevico Motor
P0398: 1.15
Tensao Nominal Motor
P0400: 440V
14
- Se necessário, ajuste
P0401 de acordo com
a corrente nominal do
motor. Para isto, pressione
“Selec.”. Esta alteração
afetará P0156, P0157 e
P0158.
Config LOC 0rpm
Reset 13:48 Selec.
Tensao Nominal Motor
P0400: 440V
Corrente Nom. Motor
P0401: 13.5 A
15
- Se necessário, ajuste
P0402 de acordo com
a rotação nominal do
motor. Para isto, pressione
“Selec.”. Esta alteração
poderá afetar P0122 a
P0131, P0133, P0134,
P0182, P0208, P0288 e
P0289.
Config LOC 0rpm
Reset 13:48 Selec.
Corrente Nom. Motor
P0401: 13.5A
Rotacao Nom. Motor
P0402= 1750rpm
16
- Se necessário, ajuste
P0403 de acordo com
a frequência nominal do
motor. Para isto, pressione
“Selec.”
Config LOC 0rpm
Reset 13:48 Selec.
Rotacao Nom. Motor
P0402: 1750 rpm
Frequencia Nom. Motor
P0403: 60Hz
17
- Se necessário, altere o
conteúdo de P0404 de
acordo com a potência
nominal do motor. Para
isto, pressione “Selec.”.
Config LOC 0rpm
Reset 13:48 Selec.
Frequencia Nom. Motor
P0403: 60Hz
Potencia Nom. Motor
P0404: 7.5CV
18
- Este parâmetro somente
estará visível se o cartão
de encoder ENC1, ENC2
ou módulo PLC11 estiver
conectado ao inversor.
- Se houver encoder
conectado ao motor,
ajuste P0405 de acordo
com o número de pulsos
por rotação do mesmo.
Para isto, pressione
“Selec.”.
Config LOC 0rpm
Reset 13:48 Selec.
Potencia Nom. Motor
P0404: 7.5cv
Numero Pulsos Encoder
P0405: 1024 ppr
Seq. Ação/Resultado Indicação no display
19
- Se necessário, altere
P0406 de acordo com
o tipo de ventilação do
motor. Para isto, pressione
“Selec.”. Esta alteração
afetará P0156, P0157,
P0158, P0399 e P0407.
Config LOC 0rpm
Reset 13:48 Selec.
Numero Pulsos Encorder
P0405: 1024 ppr
Ventilacao do Motor
P0406: Autoventilado
20
Neste ponto, a HMI
apresenta a opção de fazer
“Auto-Ajuste”. Sempre
que possível, deve-se fazer
o Auto-Ajuste.
- Assim, pressione “Selec.”
para acessar o parâmetro
P0408 e depois
para selecionar a opção
desejada. Consulte o item
11.8.5 - Auto-Ajuste [05] e
[94], para mais detalhes.
-Em seguida pressione
“Salvar”.
Config LOC 0rpm
Reset 13:48 Selec.
Ventilacao do Motor
P0406: AutoVentilado
Fazer Auto-Ajuste
P0408: Nao
21
- Feito isso é iniciada a
rotina do Auto-Ajuste
e o estado “Aajuste”
é indicado no canto
superior esquerdo da HMI.
- Se tiver sido escolhida
a opção 1, 2 ou 3 em
P0408, a HMI apresentará
“P0409: Estimando Rs”
Aajuste LOC 0rpm
13:48
P0409
Estimando Rs
[001] Sem Girar
22
- A HMI indicará
também a estimação
dos parâmetros P0411,
P0410 e P0412
(se escolhida a opção 1,
2 ou 3 em P0408).
- Quando P0408=1 ou 3
a HMI não indicará a
estimação de P0410.
- Quando P0408=3 ou 4
a HMI indicará a
estimação de P0413.
- Aguarde o término da
rotina de Auto-Ajuste.
Aajuste LOC 0rpm
13:48
P0411
Estimando σls
Aajuste LOC 0rpm
13:48
P0410
Estimando Im
Aajuste LOC 0rpm
13:48
P0412
Estimando Tr
Aajuste LOC 0rpm
13:48
P0413
Estimando Tm
23
- Uma vez terminada a
rotina de Auto-Ajuste,
o inversor volta para o
modo de monitoração.
Ready LOC 0rpm
13:48 Menu
0 rpm
4.0 A
0.0 Hz
Figura 11.6 (cont.) - Start-up Orientado do modo vetorial](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-151-2048.jpg)

![12-1
12
Funções Comuns a Todos os Modos de Controle
Funções Comuns a todos os Modos de Controle
Esta seção descreve as funções comuns a todos os modos de controle do inversor de frequência CFW-11
(V/f, VVW, Sensorless, Encoder).
12.1 Rampas [20]
As funções de RAMPAS do inversor permitem que o motor acelere e desacelere de forma mais rápida ou mais
lenta.
P0100 – Tempo de Aceleração
P0101 – Tempo de Desaceleração
Faixa de
Valores:
0.0 a 999.0 s Padrão: 20.0 s
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
20 Rampas
Descrição:
Esses parâmetros definem o tempo para acelerar (P0100) linearmente de 0 à velocidade máxima (definida em
P0134) e desacelerar (P0101) linearmente da velocidade máxima até 0.
Obs.: O ajuste em 0.0s significa que a rampa está desabilitada.
P0102 – Tempo de Aceleração da 2ª Rampa
P0103 – Tempo de Desaceleração da 2ª Rampa
Faixa de
Valores:
0.0 a 999.0 s Padrão: 20.0 s
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
20 Rampas
Descrição:
Esses parâmetros permitem que se configure uma segunda rampa para aceleração (P0102) ou desaceleração
(P0103) do motor, a qual é ativada via comando digital externo (definido por P0105). Uma vez acionado esse
comando, o inversor ignora o tempo da 1ª rampa (P0100 ou P0101) e passa a obedecer ao valor ajustado para
a 2ª rampa (consulte o exemplo para comando externo via DIx na figura 12.1 a seguir).](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-153-2048.jpg)
![Funções Comuns a Todos os Modos de Controle
12-2
12
aberto
aberto
24V
Tempo
24V
Tempo
P0102
P0100
DIx -
Gira/Pára
DIx - 2a
rampa
Velocidade
do Motor
P0103
P0101
Tempo
Figura 12.1 - Atuação da 2ª rampa
Neste exemplo, a comutação para a 2ª rampa (P0102 ou P0103) é feita através de uma das entradas digitais DI1
a DI8, desde que esta esteja programada para a função 2ª rampa (consulte o item 13.1.3 - Entradas Digitais [32],
para mais detalhes).
Obs.: O ajuste em 0.0s significa que a rampa está desabilitada.
P0104 – Rampa S
Faixa de
Valores:
0 = Inativa
1 = 50 %
2 = 100 %
Padrão: 0 = Inativa
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
20 Rampas
Descrição:
Esse parâmetro permite que as rampas de aceleração e desaceleração tenham um perfil não-linear, similar a um
“S”, como mostra a figura 12.2.
Tempo de Desaceleração
(P0101/P0103)
Tempo de Aceleração
(P0100/P0102)
t (s)
100 % rampa S
50 % rampa S
Linear
Velocidade
Figura 12.2 - Rampa S ou linear
A rampa S reduz choques mecânicos durante acelerações/desacelerações.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-154-2048.jpg)
![12-3
12
Funções Comuns a Todos os Modos de Controle
P0105 – Seleção 1a
/2a
Rampa
Faixa de
Valores:
0 = 1ª Rampa
1 = 2ª Rampa
2 = DIx
3 = Serial/USB
4 = Anybus-CC
5 = CANopen/DeviceNet/Profibus DP
6 = SoftPLC
7 = PLC11
Padrão: 2 = DIx
Propriedades: CFG
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
20 Rampas
Descrição:
Define a fonte de origem do comando que irá selecionar entre a 1ª Rampa e a 2ª Rampa.
Observações:
“1ª Rampa” significa que as rampas de aceleração e desaceleração estão seguindo os valores
programados em P0100 e P0101;
“2ª Rampa” significa que as rampas de aceleração e desaceleração estão seguindo os valores
programados em P0102 e P0103;
Pode-se monitorar o conjunto de rampas utilizadas num determinado instante no parâmetro P0680
(Estado Lógico).
12.2 Referência de Velocidade [21]
Esse grupo de parâmetros permite que se estabeleçam os valores das referências para a velocidade do motor
e para as funções JOG, JOG+ e JOG-. Também é possível definir se o valor da referência será mantido
quando o inversor for desligado ou desabilitado. Para mais detalhes consulte as figuras 13.8 e 13.9.
P0120 – Backup da Referência de Velocidade
Faixa de
Valores:
0 = Inativa
1 = Ativa
Padrão: 1 = Ativa
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
21 Refer. Velocidade
Descrição:
Esse parâmetro define se a função de backup da referência de velocidade está ativa ou inativa.
Se P0120=Inativa, o inversor não salvará o valor da referência de velocidade quando for desabilitado. Assim,
quando o inversor for novamente habilitado, o valor da referência de velocidade assumirá o valor do limite mínimo
de velocidade (P0133).
Esta função de backup aplica-se às referências via HMI, E.P., Serial/USB, Anybus-CC, CANopen/DeviceNet,
SoftPLC e Setpoint do PID.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-155-2048.jpg)

![12-5
12
Funções Comuns a Todos os Modos de Controle
P0122 – Referência de Velocidade para JOG +
P0123 – Referência de Velocidade para JOG -
Faixa de
Valores:
0 a 18000 rpm Padrão: 150 rpm
(125 rpm)
Propriedades: PM e Vetorial
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
21 Refer. Velocidade
Descrição:
Os comandos de JOG+ ou JOG- são sempre realizados via entradas digitais.
Uma entrada DIx deve ser programada para JOG+ e outra para JOG- conforme apresentado na tabela 12.2:
Tabela 12.2 - Seleção do comando JOG+ e JOG- via entrada digital
Entrada Digital
Função
JOG+ JOG -
DI1 P0263=16 P0263=17
DI2 P0264=16 P0264=17
DI3 P0265=16 P0265=17
DI4 P0266=16 P0266=17
DI5 P0267=16 P0267=17
DI6 P0268=16 P0268=17
DI7 P0269=16 P0269=17
DI8 P0270=16 P0270=17
Durante os comandos de JOG+ ou JOG- os valores de P0122 e P0123 são, respectivamente, adicionados ou
subtraídos da referência de velocidade para gerar a referência total (consulte a figura 13.8).
Para a opção JOG consulte a descrição do parâmetro anterior.
12.3 Limites de Velocidade [22]
Os parâmetros deste grupo têm como objetivo atuar como limitadores da velocidade do motor.
P0132 – Nível Máximo de Sobrevelocidade
Faixa de
Valores:
0 a 100 % Padrão: 10 %
Propriedades: CFG
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
22 Limites Velocidade
Descrição:
Esse parâmetro estabelece o maior valor de velocidade em que o motor poderá operar, e deve ser ajustado como
um percentual do limite máximo de velocidade (P0134).
Quando a velocidade real ultrapassar o valor de P0134+P0132 por mais de 20 ms, o CFW-11 irá desabilitar os
pulsos do PWM e indicará falha (F150).
Se desejar que esta função fique desabilitada, programe P0132=100 %.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-157-2048.jpg)

![12-7
12
Funções Comuns a Todos os Modos de Controle
12.4 Multispeed [36]
A função MULTISPEED é utilizada quando se deseja até 8 velocidades fixas pré-programadas, a mesma é
comandada através das entradas digitais (DI4, DI5 e DI6).
P0124 – Referência 1 Multispeed
Faixa de
Valores:
0 a 18000 rpm Padrão: 90 rpm
(75 rpm)
P0125 – Referência 2 Multispeed
Faixa de
Valores:
0 a 18000 rpm Padrão: 300 rpm
(250 rpm)
P0126 – Referência 3 Multispeed
Faixa de
Valores:
0 a 18000 rpm Padrão: 600 rpm
(500 rpm)
P0127 – Referência 4 Multispeed
Faixa de
Valores:
0 a 18000 rpm Padrão: 900 rpm
(750 rpm)
P0128 – Referência 5 Multispeed
Faixa de
Valores:
0 a 18000 rpm Padrão: 1200 rpm
(1000 rpm)
P0129 – Referência 6 Multispeed
Faixa de
Valores:
0 a 18000 rpm Padrão: 1500 rpm
(1250 rpm)
P0130 – Referência 7 Multispeed
Faixa de
Valores:
0 a 18000 rpm Padrão: 1800 rpm
(1500 rpm)
P0131 – Referência 8 Multispeed
Faixa de
Valores:
0 a 18000 rpm Padrão: 1650 rpm
(1375 rpm)
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
36 Multispeed](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-159-2048.jpg)

![12-9
12
Funções Comuns a Todos os Modos de Controle
12.5 Potenciômetro Eletrônico [37]
A função POTÊNCIOMETRO ELETRÔNICO (E.P.) permite que a referência de velocidade seja ajustada por
meio de 2 entradas digitais (uma para incrementá-la e a outra para decrementá-la).
Para habilitar essa função, deve-se primeiramente configurar a referência de velocidade via E.P., fazendo
P0221=7 e/ou P0222=7. Após habilitada esta função, basta programar duas das entradas digitais (P0263
a P0270) em 11 (Acelera E.P.) e 12 (Desacelera E.P.).
O funcionamento desta função pode ser observado na figura a seguir. É importante ressaltar que o incremento
da referência é feito com a aplicação de 24 V nas entradas digitais, enquanto o decremento é feito com a
aplicação do nível 0 V.
Para resetar a referência para zero, deve-se aplicar 24 V na entrada "acelera" e 0 V na entrada "desacelera"
simultaneamente com o CFW-11 desabilitado.
Tempo
Tempo
Tempo
Aceleração
Desaceleração
Referência
de Velocidade
Reset
para zero
Entradas
Digitais
Acelera
Desacelera
Habilitação &
Velocidade
mínima
aberto
24V
aberto
24V
DIx - Gira/Pára
Velocidade
de Saída
24V
Reset
DIx Acelera
DIx Desacelera
Tempo
Figura 12.5 - Função do potenciômetro eletrônico (E.P.)](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-161-2048.jpg)
![Funções Comuns a Todos os Modos de Controle
12-10
12
12.6 Lógica de Parada [35]
Essa função permite a configuração de uma velocidade na qual o inversor entrará em condição de bloqueio
(desabilita geral).
Recomenda-se utilizar essa função quando os comandos de Gira/Para, Sentido de giro, LOC/REM e JOG
forem gerados pelo teclado (HMI) ou pelas entradas digitais(DIx).
P0217 – Bloqueio por Velocidade Nula
Faixa de
Valores:
0 = Inativo
1 = Ativo
Padrão: 0 = Inativo
Propriedades: CFG
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
35 Lógica de Parada
Descrição:
Quando ativo, desabilita o inversor depois que a referência de velocidade (N*) e a velocidade real (N) forem
menores que o valor ajustado no parâmetro P0291 ± 1 % da velocidade nominal do motor (histerese).
O inversor volta a ser habilitado quando for atendida uma das condições definidas pelo parâmetro P0218.
PERIGO!
Cuidado ao aproximar-se do motor quando ele estiver na condição de bloqueio. O mesmo pode
voltar a operar a qualquer momento em função das condições do processo. Caso desejar manusear
o motor ou efetuar qualquer tipo de manutenção, desenergize o inversor.
P0218 – Saída do Bloqueio por Velocidade Nula
Faixa de
Valores:
0 = Referência ou Velocidade
1 = Referência
Padrão: 0 = Referência
ou Velocidade
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
35 Lógica de Parada
Descrição:
Especifica se a condição para a saída do bloqueio por velocidade nula, será apenas pela referência de velocidade
ou também pela velocidade real.
Tabela 12.5 - Saída da condição bloqueio por N=0
P0218
(P0217 = 1)
Inversor sai da condição de bloqueio por N=0
0
P0001 (N*) > P0291 ou
P0002 (N) > P0291
1 P0001 (N*) > P0291
Quando o Regulador PID estiver ativo (P0203=1) e em modo Automático, para o inversor sair da condição de
bloqueio, além da condição programada em P0218, é necessário ainda que o erro do PID (a diferença entre o
setpoint e a variável de processo) seja maior que o valor programado em P0535. Para mais detalhes consulte a
seção 20.6 - Parâmetros.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-162-2048.jpg)
![12-11
12
Funções Comuns a Todos os Modos de Controle
P0219 – Tempo com Velocidade Nula
Faixa de
Valores:
0 a 999 s Padrão: 0 s
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
35 Lógica de Parada
Descrição:
Define se a função Lógica de Parada será temporizada ou não.
Se P0219=0, a função funcionará sem temporização.
Se P0219>0, a função estará configurada com temporização, e será iniciada a contagem do tempo ajustado
neste parâmetro após a Referência de Velocidade e a Velocidade do Motor ficarem menores que o valor ajustado
em P0291. Quando a contagem atingir o tempo definido em P0219, ocorrerá a desabilitação do inversor. Se
durante a contagem de tempo alguma das condições que provocam o bloqueio por Lógica de Parada deixar de
ser atendida, então a contagem de tempo será zerada e o inversor continuará habilitado.
P0291 – Velocidade Nula
Para mais detalhes consulte no item 13.1.4 - Saídas digitais / a Relé [41].
12.7 Flying Start / Ride-Through [44]
A função FLYIN-START permite acionar um motor que está em giro livre, acelerando-o a partir da rotação em
que ele se encontra.
Já a função RIDE-THROUGH possibilita a recuperação do inversor, sem bloqueio por subtensão, quando
ocorrer uma queda na rede de alimentação.
Como essas funções operam de formas diferentes dependendo do modo de controle utilizado (V/f ou Vetorial),
elas serão descritas detalhadamente na sequência para cada um dos modos.
P0320 – Flying Start / Ride-Through
Faixa de
Valores:
0 = Inativas
1 = Flying Start
2 = Flying Start / Ride-Through
3 = Ride-Through
Padrão: 0
Propriedades: CFG e PM
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
44 FlyStart/RideThru
Descrição:
O parâmetro P0320 seleciona a utilização das funções Flying Start e Ride-Through. Mais detalhes nas seções
subsequentes.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-163-2048.jpg)
![Funções Comuns a Todos os Modos de Controle
12-12
12
12.7.1 Flying Start V/f
No modo V/f, o inversor vai impor uma frequência fixa na partida, definida pela referência de velocidade, e
aplicar a rampa de tensão definida no parâmetro P0331. A função Flying Start será acionada após o tempo
ajustado em P0332 (para permitir a desmagnetização do motor) sempre que um comando “Gira” for acionado.
12.7.2 Flying Start Vetorial
12.7.2.1 P0202=3
O comportamento da Função Flying Start (FS) no modo sensorless durante a aceleração e a re-aceleração
pode ser compreendido a partir da figura 12.6.
Na figura 12.6(b) é mostrado o comportamento da referência de velocidade quando a função FS é iniciada
com eixo do motor parado e P0329 pequeno (não otimizado).
Análise do funcionamento:
1. A frequência igual ao ajuste de P0134 é aplicada com uma corrente igual a 0.9xP0401 (controle I/f);
2. A frequência é reduzida até zero utilizando a rampa dada por: P0329xP0412;
3. Se a velocidade não for encontrada durante essa variação de frequência, é iniciada uma nova busca no
sentido de giro contrário, onde a frequência é variada desde [– P0134] até zero; após a segunda verificação
é encerrado o FS, e o modo de controle volta a ser o vetorial sensorless.
Na figura 12.6(c) é apresentada a referência de velocidade quando a Função FS é iniciada com o eixo do
motor girando no sentido desejado ou o eixo estava parado e P0329 já otimizado.
Análise do funcionamento:
1. A frequência igual ao ajuste de a P0134 é aplicada com uma corrente igual a 0.9xP0401 (controle I/f).
2. A frequência é reduzida utilizando a rampa dada por: P0329xP0412 até encontrar a velocidade do motor;
3. Neste momento o modo de controle volta a ser o vetorial sensorless.
NOTA!
Para que a velocidade do eixo do motor seja encontrada na primeira varredura, proceder ao ajuste
de P0329 da seguinte forma:
1. Incrementar P0329 utilizando intervalos de 1.0;
2. Habilitar o inversor e observar o movimento do eixo do motor durante a atuação do FS;
3. Se o eixo apresentar movimento nos dois sentidos de rotação, provocar a parada do motor e
repetir os itens 1. e 2.
NOTA!
Os parâmetros utilizados são P0327 a P0329.
NOTA!
Quando o comando de habilita geral for ativado, não ocorrerá a magnetização do motor.
NOTA!
Para o melhor funcionamento da função, recomenda-se a ativação da frenagem sem perdas,
ajustando-se o parâmetro P0185 de acordo com a tabela 11.9.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-164-2048.jpg)

![Funções Comuns a Todos os Modos de Controle
12-14
12
H. Geral (c/ G/P=ON) ou G/P( c/ HG=ON)
+24 v
tempo
(c)
(a)
(d)
4xP412 1s
P134
n*
N P0329xP0412
tempo
-P134
(b)
4xP412
1s 2xP412
P329xP412
n*
N
P001
tempo
P003
P327
tempo
P134
I/f Vetorial
I/f
I = 0.9 x P0401
Vetorial
N
N
P0001
P0134
P0134
n*
n*
N
N
P0327
-P0134
Vetorial
Vetorial
tempo
+24 V
P0329xP0412
H. Geral (c/ G/P=ON) ou G/P( c/ HG=ON)
P0329xP0412
4xP0412
4xP0412
2xP0412
P0003
1s
N
N
1s
I/F
I/F
tempo
tempo
tempo
I = 0.9 x P0401
(a)
(b)
(c)
(d)
Figura 12.6 (a) a (d) - Influência de P0327 e P0329 durante o Flying Start (P0202=3)
Desejando-se desativar momentaneamente a função Flying Start, pode-se programar uma das
entradas digitais P0263 a P0270 em 24 (Desab. FlyStart). Consulte o item 13.1.3 - Entradas
Digitais [40].](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-166-2048.jpg)

![Funções Comuns a Todos os Modos de Controle
12-16
12
P0331 – Rampa de Tensão
Faixa de
Valores:
0.2 a 60.0 s Padrão: 2.0 s
Propriedades: V/f e VVW
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
44 FlyStart/RideThru
Descrição:
Esse parâmetro ajusta o tempo necessário para que a tensão de saída atinja o valor da tensão nominal.
É utilizado tanto pela função Flying Start quanto pela função Ride-Through (ambas no modo V/f), em conjunto com
o parâmetro P0332.
P0332 – Tempo Morto
Faixa de
Valores:
0.1 a 10.0 s Padrão: 1.0 s
Propriedades: V/f e VVW
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
44 FlyStart/RideThru
Descrição:
O parâmetro P0332 ajusta o tempo mínimo que o inversor aguardará para voltar a acionar o motor, que é
necessário para a desmagnetização do motor.
No caso da função Ride-Through, o tempo é contado a partir da queda da rede. Entretanto na atuação da função
Flying Start, a contagem é iniciada após a aplicação do comando “Gira/Para=Gira”.
Para o correto funcionamento, deve-se ajustar esse tempo para duas vezes a constante rotórica do motor (consulte
a tabela 11.7 no item 11.8.5 - Auto-Ajuste [05] e [94]).
12.7.4 Ride-Through Vetorial
Diferente do modo V/f, no modo Vetorial a função Ride-Through procura regular a tensão do barramento CC
durante a falta de rede, sem interrupção ou memorização de falha. A energia necessária para manter o inversor
em funcionamento é obtida da energia cinética do motor (inércia) através da desaceleração do mesmo. Assim,
no retorno da rede, o motor é reacelerado para a velocidade definida pela referência.
Após a falta de rede (t0), a tensão do barramento CC (Ud) começa a diminuir segundo uma taxa dependente
da condição de carga do motor, podendo atingir o nível de subtensão (t2) se a função Ride-Through não estiver
operando. O tempo típico necessário para que isto ocorra, com carga nominal, é da ordem de 5 a 15 ms.
Com a função Ride-Through ativa, a falta de rede é detectada quando a tensão Ud atingir um valor abaixo
do valor “Ud para Falta de Rede” (t1), definido no parâmetro P0321. Imediatamente o inversor inicia a
desaceleração controlada do motor, regenerando energia para o barramento CC de modo a manter o motor
operando com a tensão Ud regulada no valor “Ud para Ride-Through” (P0322).](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-168-2048.jpg)


![12-19
12
Funções Comuns a Todos os Modos de Controle
P0325 – Ganho Proporcional do Ride-Through
Faixa de
Valores:
0.0 a 63.9 Padrão: 22.8
P0326 – Ganho Integral do Ride-Through
Faixa de
Valores:
0.000 a 9.999 Padrão: 0.128
Propriedades: Vetorial
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
44 FlyStart/RideThru
Descrição:
Esses parâmetros configuram o controlador PI do Ride-Through no modo vetorial, que é responsável por manter a
tensão do barramento CC no nível ajustado em P0322.
Ud
P0325, P0326
Regulador R.T.
Ud
Ride-Through
(P0322)
Consulte a Figura
11.1 ou 11.2-
Figura 12.9 - Controlador PI do Ride-Through
Normalmente o ajuste de fábrica para P0325 e P0326 é adequado para a maioria das aplicações. Não altere
esses parâmetros.
12.8 Frenagem CC [47]
NOTA!
A Frenagem CC na partida e/ou na parada não atua se P0202=4 (Controle Vetorial com Encoder).
NOTA!
A Frenagem CC na partida não atua quando a função Flying Start estiver ativa (P0320=1 ou 2).
A frenagem CC consiste na aplicação de corrente contínua no motor, permitindo a parada rápida do mesmo.
Tabela 12.7 - Parâmetros relacionados à frenagem CC
Modo de Controle Frenagem CC na Partida Frenagem CC na Parada
Escalar V/f P0299 e P0302 P0300, P0301 e P0302
VVW P0299 e P0302 P0300, P0301 e P0302
Vetorial Sensorless P0299 e P0372 P0300, P0301 e P0372](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-171-2048.jpg)



![12-23
12
Funções Comuns a Todos os Modos de Controle
12.9 Pular Velocidade [48]
Os parâmetros deste grupo evitam que o motor opere permanentemente em valores de velocidade nos quais,
por exemplo, o sistema mecânico entra em ressonância (causando vibração ou ruídos exagerados).
P0303 – Velocidade Evitada 1
Faixa de
Valores:
0 a 18000 rpm Padrão: 600 rpm
P0304 – Velocidade Evitada 2
Faixa de
Valores:
0 a 18000 rpm Padrão: 900 rpm
P0305 – Velocidade Evitada 3
Faixa de
Valores:
0 a 18000 rpm Padrão: 1200 rpm
P0306 – Faixa de Velocidade Evitada
Faixa de
Valores:
0 a 750 rpm Padrão: 0 rpm
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
48 Pular Velocidade
Descrição:
A atuação desses parâmetros é feita conforme apresentado na figura 12.13 a seguir.
A passagem pela faixa de velocidade evitada (2xP0306) é feita através de rampa de aceleração/desaceleração.
A função não opera de forma correta se duas faixas de “Velocidade Evitada” se sobrepuserem.
NOTA!
Não são consideradas as referências de velocidade que não passam pela rampa de velocidade,
como JOG+, JOG-, P0231, P0236, P0241 ou P0246 =1.
2 x P0306
P0303
P0304
P0305
P0303
P0304
P0305
2 x P0306
Referência
de Velocidade
Velocidade do motor
Figura 12.13 - Curva de atuação das “Velocidades Evitadas”](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-175-2048.jpg)

![13-1
13
Entradas e Saídas Digitais e Analógicas
Entradas e Saídas Digitais e Analógicas
Esta seção apresenta os parâmetros para configuração das entradas e saídas do CFW-11, bem como os
parâmetros para o comando do inversor em Situação Local ou Remoto.
13.1 Configuração de I/O [07]
13.1.1 Entradas Analógicas [38]
Na configuração padrão do CFW-11, estão disponíveis 2 entradas analógicas (AI1 e AI2), e como acessórios
podem ser adicionadas outras 2 entradas (AI3 e AI4). AI4 está disponível no módulo IOA-01 ou no módulo
IOB-01; A entrada AI3 está disponível apenas no módulo IOB-01.
NOTA!
Os parâmetros associados as entradas analógicas AI3 e AI4 serão mostrados na HMI apenas quando
o módulo IOA-01 ou IOB-01 estiver conectado no slot 1 (XC41).
Com essas entradas é possível, por exemplo, o uso de uma referência externa de velocidade ou a conexão
de um sensor para medição de temperatura (PTC). Os detalhes para essas configurações estão descritos nos
parâmetros a seguir.
P0018 – Valor de AI1
P0019 – Valor de AI2
P0020 – Valor de AI3
P0021 – Valor de AI4
Faixa de
Valores:
-100.00 a 100.00 % Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
07 CONFIGURAÇÃO I/O ou 01 GRUPOS PARÂMETROS
38 Entradas Analógicas 38 Entradas Analógicas
Descrição:
Esses parâmetros, somente de leitura, indicam o valor das entradas analógicas AI1 a AI4, em percentual do fundo
de escala. Os valores indicados são os valores obtidos após a ação do offset e da multiplicação pelo ganho. Veja
a descrição dos parâmetros P0230 a P0250.
P0230 – Zona Morta das Entradas Analógicas
Faixa de
Valores:
0 = Inativa
1 = Ativa
Padrão: 0 = Inativa
Propriedades:
Grupos de
Acesso via HMI:
07 CONFIGURAÇÃO I/O ou 01 GRUPOS PARÂMETROS
38 Entradas Analógicas 38 Entradas Analógicas](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-177-2048.jpg)

![13-3
13
Entradas e Saídas Digitais e Analógicas
P0246 – Função do Sinal AI4
Faixa de
Valores:
0 = Referência de Velocidade
1 = N* sem Rampa
2 = Máxima Corrente de Torque
3 = Variável de Processo
4 = Sem função
5 = Sem função
6 = Sem função
7 = Uso PLC
Padrão: 0 = Referência
de Velocidade
Propriedades: CFG
Grupos de
Acesso via HMI:
07 CONFIGURAÇÃO I/O ou 01 GRUPOS PARÂMETROS
38 Entradas Analógicas 38 Entradas Analógicas
Descrição:
Nesses parâmetros são definidas as funções das entradas analógicas.
Quando é selecionada a opção 0 (Referência de Velocidade), as entradas analógicas podem fornecer a referência
para o motor, sujeita aos limites especificados (P0133 e P0134) e à ação das rampas (P0100 a P0103). Mas para
isso é necessário configurar também os parâmetros P0221 e/ou P0222, selecionando o uso da entrada analógica
desejada (Para mais detalhes consulte a descrição desses parâmetros na seção 13.2 - Comando Local [31] e
Comando Remoto [32] e a figura 13.8 deste manual).
A opção 1 (N* sem Rampa – válida somente para o modo vetorial) é utilizada geralmente como um sinal de
referência adicional, por exemplo em aplicações usando balancim (Consulte a figura 13.8, opção sem rampa de
aceleração e desaceleração).
A opção 2 (Máxima Corrente de Torque) permite que o controle do limite da corrente de torque horário e
anti-horário, seja feita através da entrada analógica selecionada. Neste caso, P0169 e P0170 não são utilizados.
O ajuste feito na entrada analógica AI1, AI2, AI3 ou AI4, pode ser monitorado no parâmetro P0018, P0019,
P0020 ou P0021, respectivamente. O valor apresentado neste parâmetro será o valor máximo da corrente de
torque, expresso em percentual da corrente nominal do motor (P0401). A faixa de variação da indicação será:
0...200 %. Quando a entrada analógica for igual a 10V (máximo), o parâmetro de monitoração correspondente
mostrará 200 %, e o valor da máxima corrente de torque horário e anti-horário serão iguais a 200 %.
Para que as expressões que determinam a corrente total e o torque máximo desenvolvido pelo motor (seções 11.5
- Controle de Torque e 11.8.6 - Limitação Corrente Torque [95]) continuem válidas, deve-se substituir P0169,
P0170 por P0018 a P0021.
A opção 3 (Variável de Processo) define a entrada analógica como sinal de realimentação do Regulador PID
(por exemplo: sensor de pressão, temperatura, etc.). Para isso deve-se configurar também o parâmetro P0524
(Seleção da Realimentação do PID).
Quando a entrada analógica estiver no seu limite máximo (P0018 a P0021 indicando 100 %), a variável de
processo estará também no valor máximo (100 %).
A opção 4 (PTC – não disponível para a entrada AI4) configura a entrada para a monitoração da temperatura
do motor, através da leitura de um sensor do tipo PTC, quando este estiver presente no motor. Para isso é necessário
ainda configurar uma saída analógica (AO) como fonte de corrente para alimentação do PTC. Mais detalhes
dessa função são descritos na seção 15.2 – Proteção de Sobretemperatura do Motor.
A opção 7 (Uso PLC) configura o sinal na Entrada para utilização pelo cartão PLC11.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-179-2048.jpg)


![Entradas e Saídas Digitais e Analógicas
13-6
13
Tabela 13.2 - Configuração dos sinais das entradas analógicas
P0233, P0243 P0238, P0248 Sinal Entrada Posição Chave
0 0 (0 a 10) V / (0 a 20) mA Off/On
1 1 (4 a 20) mA On
2 2 (10 a 0) V / (20 a 0) mA Off/On
3 3 (20 a 4) mA On
– 4 (-10 a +10) V Off
Quando utilizados sinais em corrente nas entradas, deve-se colocar a chave correspondente à entrada desejada
na posição “ON”.
Para as opções 2 e 3 tem-se a referência inversa, isto é, tem-se a velocidade máxima com referência mínima.
13.1.2 Saídas Analógicas [39]
Na configuração padrão do CFW-11 estão disponíveis 2 saídas analógicas (AO1 e AO2), e mais 2 saídas
(AO3 e AO4) que podem ser adicionadas com o acessório IOA-01. A seguir estão descritos os parâmetros
relacionados a estas saídas.
NOTA!
Os parâmetros associados as saídas analógicas AO3 e AO4 serão mostrados na HMI apenas
quando o módulo IOA-01 estiver conectado no slot 1 (XC41).
P0014 – Valor de AO1
P0015 – Valor de AO2
Faixa de
Valores:
0.00 a 100.00 % Padrão:
P0016 – Valor de AO3
P0017 – Valor de AO4
Faixa de
Valores:
-100.00 a 100.00 % Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
07 CONFIGURAÇÃO I/O ou 01 GRUPOS PARÂMETROS
39 Saídas Analógicas 39 Saídas Analógicas
Descrição:
Esses parâmetros, somente de leitura, indicam o valor das saídas analógicas AO1 a AO4, em percentual do fundo
de escala. Os valores indicados são os valores obtidos após a multiplicação pelo ganho. Veja a descrição dos
parâmetros P0251 a P0261.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-182-2048.jpg)




![13-11
13
Entradas e Saídas Digitais e Analógicas
Tabela 13.5 - Chaves “DIP switch” relacionadas com as saídas analógicas
Parâmetro Saída Chave Localização
P0253 AO1 S1.1
Cartão de Controle
P0256 AO2 S1.2
P0259 AO3 S2.1
IOA
P0262 AO4 S2.2
Tabela 13.6 - Configuração dos sinais das saídas analógicas AO1 e AO2
P0253, P0256 Sinal Saída Posição Chave
0 (0 a 10) V / (0 a 20) mA On / Off
1 (4 a 20) mA Off
2 (10 a 0) V / (20 a 0) mA On / Off
3 (20 a 4) mA Off
Tabela 13.7 - Configuração dos sinais das saídas analógicas AO3 e AO4
P0259, P0262 Sinal Saída Posição Chave
0 0 a 20 mA Off
1 4 a 20 mA Off
2 20 a 0 mA Off
3 20 a 4 mA Off
4 0 a 10 V Off
5 10 a 0 V Off
6 -10 a +10 V On
Para AO1 e AO2, quando utilizados sinais em corrente, deve-se colocar a chave correspondente à saída desejada
na posição “OFF”.
Para AO3 e AO4, quando utilizados sinais em corrente, devem ser utilizadas as saídas AO3 (I) e AO4 (I). Para sinais
em tensão, utilizar as saídas AO3 (V) e AO4 (V). A chave correspondente à saída desejada deve ser posicionada em
“ON” apenas para utilizar a faixa -10 a +10 V.
13.1.3 Entradas Digitais [40]
Para utilização de entradas digitais, o CFW-11 dispõe de 6 portas na versão padrão do produto, e mais 2
podem ser adicionadas com os acessórios IOA-01 e IOB-01. Os parâmetros que configuram essas entradas
são apresentados a seguir.
P0012 – Estado das Entradas Digitais DI8 a DI1
Faixa de
Valores:
Bit 0 = DI1
Bit 1 = DI2
Bit 2 = DI3
Bit 3 = DI4
Bit 4 = DI5
Bit 5 = DI6
Bit 6 = DI7
Bit 7 = DI8
Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
07 CONFIGURAÇÃO I/O ou 01 GRUPOS PARÂMETROS
40 Entradas Digitais 40 Entradas Digitais](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-187-2048.jpg)

![13-13
13
Entradas e Saídas Digitais e Analógicas
Tabela 13.9 - Funções das entradas digitais
Funções
P0263
(DI1)
P0264
(DI2)
P0265
(DI3)
P0266
(DI4)
P0267
(DI5)
P0268
(DI6)
P0269
(DI7)
P0270
(DI8)
Sem função 0, 13 e 23 0, 13 e 23 0*, 13 e 23 0* e 23 0 e 23 0 e 23 0*, 13 e 23 0*, 13 e 23
Gira/Para 1* 1 1 1 1 1 1 1
Habilita Geral 2 2 2 2 2 2 2 2
Parada Rápida 3 3 3 3 3 3 3 3
Avanço 4 4 4 4 4 4 4 4
Retorno 5 5 5 5 5 5 5 5
Start 6 6 6 6 6 6 6 6
Stop 7 7 7 7 7 7 7 7
Sentido Giro 8 8* 8 8 8 8 8 8
LOC/REM 9 9 9 9 9 9 9 9
JOG 10 10 10 10 10* 10 10 10
Acelera E.P. 11 11 11 11 11 11 11 11
Desacelera E.P. 12 12 12 12 12 12 12 12
Multispeed - - - 13 13 13 - -
2ª Rampa 14 14 14 14 14 14* 14 14
Veloc./Torque 15 15 15 15 15 15 15 15
JOG+ 16 16 16 16 16 16 16 16
JOG- 17 17 17 17 17 17 17 17
Sem Alarme Ext. 18 18 18 18 18 18 18 18
Sem Falha Ext 19 19 19 19 19 19 19 19
Reset 20 20 20 20 20 20 20 20
Uso PLC 21 21 21 21 21 21 21 21
Manual/Autom. 22 22 22 22 22 22 22 22
Desab. FlyStart 24 24 24 24 24 24 24 24
Regul. Barr. CC 25 25 25 25 25 25 25 25
Bloqueia Prog. 26 26 26 26 26 26 26 26
Carrega Us. 1/2 27 27 27 27 27 27 27 27
Carrega Us. 3 28 28 28 28 28 28 28 28
Temporiz. DO2 29 29 29 29 29 29 29 29
Temporiz. DO3 30 30 30 30 30 30 30 30
Função Trace 31 31 31 31 31 31 31 31
* Padrão de fábrica
Propriedades:
Grupos de
Acesso via HMI:
07 CONFIGURAÇÃO I/O ou 01 GRUPOS PARÂMETROS
40 Entradas Digitais 40 Entradas Digitais
Descrição:
Esses parâmetros permitem configurar a função das entradas digitais, conforme a faixa de valores relacionada.
Abaixo estão algumas notas referentes as funções das Entradas Digitais.
- Gira/Pára: Para assegurar o correto funcionamento desta função, é necessário programar P0224 e/ou P0227
em 1.
- Parada Rápida: O comando "Gira/Para = Para" é executado com rampa de desaceleração nula, independentemente
do ajuste de P0101 ou P0103, não se recomenda sua utilização nos modos de controle V/f e VVW.
- Acelera E.P. e Desacelera E.P. (Potenciômetro Eletrônico): Estão ativas quando se aplica +24 V (para Acelera
E.P.) ou 0 V (para Desacelera E.P.) na respectiva entrada configurada para esta função. É necessário também
programar P0221 e/ou P0222 em 7, consulte a seção 12.5 - Potênciometro Eletônico [37].
- Local/Remoto: Quando programada, essa função atua em “Local” com a aplicação de 0 V na entrada, e em
“Remoto” com a aplicação de +24 V. É necessário programar também P0220=4 (DIx).
- Velocidade/Torque: Essa função é válida para P0202=3 ou 4 (Controle Vetorial Sensorless ou Controle
Vetorial com Encoder), e seleciona-se “Velocidade” com a aplicação de 0 V na entrada, ou “Torque” com a
aplicação de 24 V.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-189-2048.jpg)
![Entradas e Saídas Digitais e Analógicas
13-14
13
Quando for selecionado Torque, os parâmetros do regulador de velocidade P0161 e P0162 ficam inativos (*).
Com isto a Referência Total passa a ser a entrada do Regulador de Torque. Consulte a figura 11.1 e 11.2.
(*) O regulador de velocidade tipo PID é convertido em um regulador tipo P, com ganho proporcional 1.00 e
ganho integral nulo.
Quando for selecionada Velocidade os ganhos do regulador de velocidade voltam a ser definidos por P0161 e
P0162. Nas aplicações com controle de torque recomenda-se seguir o método descrito no parâmetro P0160.
- Regulador Barramento CC: deve ser utilizada quando P0184=2. Para mais detalhes, consulte a descrição
deste parâmetro no item 11.8.7 - Regulador do Barramento CC [96], deste manual.
- JOG+ e JOG-: funções válidas somente para P0202=3 ou 4.
- Desabilita Flying-Start: válido para P0202≠4, aplicando-se +24 V na entrada digital programada para
essa finalidade desabilita-se a função Flying-Start. Aplicando-se 0 V a função Flying-Start volta a ser habilitada
desde que o P0320 seja igual a 1 ou 2, consulte a seção 12.7 - Flying Start / Ride-Througth [44].
- Carrega Usuário 1/2: essa função permite a seleção da memória do usuário 1 ou 2, processo semelhante a
P0204=7 ou 8, com a diferença de que o usuário é carregado a partir de uma transição na DIx programada
para essa função.
Quando o estado da DIx alterar de nível baixo para nível alto (transição de 0 V para 24 V), é carregada a
memória do usuário 1, desde que anteriormente tenha sido transferido o conteúdo dos parâmetros atuais do
inversor para a memória de parâmetros 1 (P0204=10).
Quando o estado da DIx alterar de nível alto para nível baixo (transição de 24 V para 0 V), é carregada a
memória do usuário 2, desde que anteriormente tenha sido transferido o conteúdo dos parâmetros atuais do
inversor para a memória de parâmetros 2 (P0204=11).
Parâmetros do
Inversor
Usuário 1
Usuário 2
P0204=11
P0204=10
P0263 a P0270
(DIx)=27
DIx=0 V
P0263 a P0270 (DIx)=27
DIx=24 V DIx=0 V
DIx=24 V
Figura 13.4 - Detalhes sobre o funcionamento da função Carrega Usuário 1/2
- Carrega Usuário 3: essa função permite a seleção da memória do usuário 3, processo semelhante a
P0204=9, com a diferença de que o usuário é carregado a partir de uma transição na DIx programada para
essa função.
Quando o estado da DIx alterar de nível baixo para nível alto (transição de 0 V para 24 V), é carregada a memória
do usuário 3, desde que anteriormente tenha sido transferido o conteúdo dos parâmetros atuais do inversor para
a memória de parâmetros 3 (P0204=12).
NOTAS!
Assegure-se que ao utilizar estas funções os conjuntos de parâmetros (Memória do Usuário
1, 2 ou 3) sejam totalmente compatíveis com a aplicação (motores, comandos liga/desliga, etc).
Com o motor habilitado não será possível carregar memória de usuário.
Se forem salvos dois ou três conjuntos de parâmetros diferentes de motores nas memórias de
usuário 1, 2 e/ou 3, deve-se ajustar os valores de corrente corretos nos parâmetros P0156, P0157
e P0158 para cada usuário.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-190-2048.jpg)
![13-15
13
Entradas e Saídas Digitais e Analógicas
- Bloqueia Programação: quando esta função estiver programada e a entrada DIx estiver em +24 V, não será
permitida alteração de parâmetros, independente dos valores ajustados em P0000 e P0200. Quando a entrada
DIx estiver em 0 V, a alteração de parâmetros estará condicionada aos valores ajustados em P0000 e P0200.
- Temporizador DO2 e DO3: essa função atua como um temporizador para ativar e desativar os relés 2 e 3
(DO2 e DO3).
Quando programado em alguma DIx a função de temporização dos relés 2 e 3, e for efetuada a transição de
0 V para +24 V, o relé programado será ativado de acordo com o tempo ajustado em P0283 (DO2) ou P0285
(DO3). Quando ocorrer a transição de +24 V para 0 V, o relé programado será desativado de acordo com o
tempo ajustado em P0284 (DO2) ou P0286 (DO3).
Após a transição da DIx, para ativar ou desativar o relé programado, é necessário que a DIx permaneça em ON/OFF
pelo menos o tempo ajustado nos parâmetros P0283/P0285 e P0284/P0286. Caso contrário o temporizador será
resetado. Consulte a figura 13.5.
Obs.: Para a atuação dessa função é necessário programar P0276 e/ou P0277=29 (Temporizador).
+24 V
0 V
DIx
DO2 (RL2)
DO3 (RL3)
ON
OFF
P0283/P0285 P0284/P0286 P0283/P0285 P0284/P0286
Figura 13.5 - Funcionamento da função temporizador DO2 (RL2) e DO3 (RL3)
- Multispeed: o ajuste dos parâmetros P0266 e/ou P0267 e/ou P0268=13 requerem que o parâmetros P0221
e/ou P0222 sejam programados em 8. Consulte na seção 12.4 - Multispeed [36], na descrição dos parâmetros
P0124 a P0131.
- Função Trace: dispara a aquisição de dados dos canais selecionados com essa função, quando as 3 condições
a seguir forem satisfeitas:
- Se a DIx estiver em 24 V;
- Condição Trigger ajustada em P0552=6 "DIx";
- Função aguardando Trigger P0576=1 "aguardando".
Para mais detalhes, consulte o capítulo 19 - Função Trace.
- Sem Alarme Externo: essa função irá indicar "Alarme Externo" (A090) no display da HMI quando a entrada digital
pogramada estiver aberta (0 V). Se for aplicada +24 V na entrada, a mensagem de alarme automaticamente
desaparecerá do display da HMI. O motor continua trabalhando normalmente, independentemente do estado
dessa entrada.
- Manual/Automático: permite selecionar a referência de velocidade do CFW-11 entre a referência definida
por P0221/P0222 (modo Manual-DIx aberta) e a referência definida pela saída do regulador PID (modo
Automático - DIx em 24 V). Para mais detalhes consulte o capítulo 20 - Regulador PID.
- Uso PLC: Quando esta opção for selecionada não tomará nenhuma ação para o CFW-11. Poderá ser utilizada
como uma entrada remota para o cartão PLC11 ou para Redes de Comunicação.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-191-2048.jpg)



![13-19
13
Entradas e Saídas Digitais e Analógicas
13.1.4 Saídas Digitais / a Relé [41]
Como padrão, o CFW-11 dispõe de 3 saídas digitais a relé no seu cartão de controle, e mais 2 saídas do
tipo coletor aberto podem ser adicionadas com os acessórios IOA-01 ou IOB-01. Os parâmetros a seguir
configuram as funções relacionadas a essas saídas.
P0013 – Estado das Saídas Digitais DO5 a DO1
Faixa de
Valores:
Bit 0 = DO1
Bit 1 = DO2
Bit 2 = DO3
Bit 3 = DO4
Bit 4 = DO5
Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
07 CONFIGURAÇÃO I/O ou 01 GRUPOS PARÂMETROS
41 Saídas Digitais 41 Saídas Digitais
Descrição:
Através desse parâmetro é possível visualizar o estado das 3 saídas digitais do cartão de controle (DO1 a DO3) e
das 2 saídas digitais do módulo acessório (DO4 e DO5).
A indicação é feita por meio dos números "1" e "0" para representar, respectivamente, os estados “Ativo” e “Inativo”
das saídas. O estado de cada saída é considerado como um dígito na sequência, sendo que a DO1 representa
o dígito menos significativo.
Exemplo: Caso a sequência 00010010 seja apresentada na HMI, ela corresponderá ao seguinte estado das
DOs:
Tabela 13.10 - Estado das saídas digitais
DO5 DO4 DO3 DO2 DO1
Ativa
(+24 V)
Inativa
(0 V)
Inativa
(0 V)
Ativa
(+24 V)
Inativa
(0 V)
P0275 – Função da Saída DO1 (RL1)
P0276 – Função da Saída DO2 (RL2)
P0277 – Função da Saída DO3 (RL3)
P0278 – Função da Saída DO4
P0279 – Função da Saída DO5
Faixa de
Valores:
0 a 42 Padrão: P0275=13
P0276=2
P0277=1
P0278=0
P0279=0
Propriedades:
Grupos de
Acesso via HMI:
07 CONFIGURAÇÃO I/O ou 01 GRUPOS PARÂMETROS
41 Saídas Digitais 41 Saídas Digitais](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-195-2048.jpg)









![13-29
13
Entradas e Saídas Digitais e Analógicas
13.2 Comando Local [31] E COMANDO REMOTO [32]
Nesses grupos de parâmetros pode-se configurar a fonte de origem dos principais comandos do inversor na
situação local ou remoto, como Referência de Velocidade, Sentido de Giro, Gira/Pára e JOG.
P0220 – Seleção LOCAL/REMOTO
Faixa de
Valores:
0 = Sempre Local
1 = Sempre Remoto
2 = Tecla Local/Remoto (Local)
3 = Tecla Local/Remoto (Remoto)
4 = DIx
5 = Serial / USB Local
6 = Serial / USB Remoto
7 = Anybus-CC Local
8 = Anybus-CC Remoto
9 = CANopen / DeviceNet / Profibus DP Local
10 = CANopen / DeviceNet / Profibus DP Remoto
11 = SoftPLC Local
12 = SoftPLC Remoto
13 = PLC11 Local
14 = PLC11 Remoto
Padrão: 2 = Tecla
Local/Remoto
(Local)
Propriedades: CFG
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS ou 01 GRUPOS PARÂMETROS
31 Comando Local 32 Comando Remoto
Descrição:
Define a fonte de origem do comando que irá selecionar entre a situação local e a situação remoto, onde:
Local: Significa Default situação local.
Remoto: Significa Default situação Remoto.
DIx: Consultar item 13.1.3 - Entradas Digitais [40].
P0221 – Seleção da Referência de Velocidade - Situação LOCAL
P0222 – Seleção da Referência de Velocidade - Situação REMOTO
Faixa de
Valores:
0 = HMI
1 = AI1
2 = AI2
3 = AI3
4 = AI4
5 = AI1+AI2 > 0 (Soma AIs>0)
6 = AI1+AI2 (Soma AIs)
7 = E.P.
8 = Multispeed
9 = Serial/USB
10 = Anybus-CC
11 = CANopen/DeviceNet / Prifibus DP
12 = SoftPLC
13 = PLC11
Padrão: P0221=0
P0222=1
Propriedades: CFG
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS ou 01 GRUPOS PARÂMETROS
31 Comando Local 32 Comando Remoto](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-205-2048.jpg)
![Entradas e Saídas Digitais e Analógicas
13-30
13
Descrição:
Definem a fonte de origem para a Referência de Velocidade na Situação local e na Situação remoto.
Algumas observações sobre as opções desses parâmetros:
A descrição AIx’ refere-se ao sinal analógico obtido após a soma de AIx com o offset e multiplicado pelo
ganho aplicado (consulte o item 13.1.1 - Entradas Analógicas [38]).
O valor da referência ajustado pelas teclas e está contido no parâmetro P0121.
Ao selecionar a opção 7 (E.P.), programar uma das entradas digitais em 11 (Acelera E.P.) e outra em 12
(Desacelera E.P.). Para mais detalhes consulte a seção 12.5 - Potenciômetro Eletrônico [37].
Ao selecionar a opção 8, programar P0266 e/ou P0267 e/ou P0268 para 13 (Multispeed). Consulte a
seção 12.4 - Multispeed [36].
Quando P0203=1 (Regulador PID), não utilizar a referência via E.P.
Quando P0203=1, o valor programado em P0221/P0222 passa a ser Setpoint do PID.
P0223 – Seleção do Sentido de Giro - Situação LOCAL
P0226 – Seleção do Sentido de Giro - Situação REMOTO
Faixa de
Valores:
0 = Horário
1 = Anti-horário
2 = Tecla Sentido Giro (H)
3 = Tecla Sentido Giro (AH)
4 = DIx
5 = Serial/USB (H)
6 = Serial/USB (AH)
7 = Anybus-CC (H)
8 = Anybus-CC (AH)
9 = CANopen/DeviceNet/Profibus DP (H)
10 = CANopen/DeviceNet/Profibus DP (AH)
11 = Polaridade AI4
12 = SoftPLC (H)
13 = SoftPLC (AH)
14 = Polaridade AI2
15 = PLC11 (H)
16 = PLC11 (AH)
Padrão: P0223 = 2
P0226 = 4
Propriedades: CFG, V/f VVW e Vetorial
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS ou 01 GRUPOS PARÂMETROS
31 Comando Local 32 Comando Remoto
Descrição:
Definem a fonte de origem para o comando “Sentido de Giro” na situação local e remoto, onde:
H: Significa Default Horário.
AH: Significa Default Anti-horário.
DIx: Consulte o item 13.1.3 - Entradas Digitais [40].](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-206-2048.jpg)



![Entradas e Saídas Digitais e Analógicas
13-34
13
Local
Referência (P0221)
Referência
Local
Referência
Remota
Comandos
Local
Comandos
Remota
(P0220)
Seleção Local / Remoto
Referência
ComandosComandos
Referência
Sentido de giro
(P0223)
Jog (P0225)
Gira/Pára (P0224)
Remoto
Referência (P0222)
Sentido de giro
(P0226)
Jog (P0228)
Gira/Pára (P0227)
Figura 13.9 - Blocodiagrama Situação Local / Remoto
13.3 Comando a 3 Fios [33]
O grupo definido como “Comando a 3 Fios” refere-se à função “Start/Stop” programada via entradas
digitais.
Com essa função é possível acionar ou desacionar o motor através de pulsos de sinal nas entradas digitais
configuradas como Start (DIx=6) e Stop (DIx=7). O único detalhe da aplicação desse sinal é que o pulso
para o comando Stop deve ser invertido, ou seja: variando de +24 V para 0 V.
Para uma melhor compreensão desta função recomenda-se verificar a figura 13.6 (k).
13.4 Comando Avanço/Retorno [34]
A função de Avanço/Retorno pode ser utilizada para comandar o motor nos sentidos horário e anti-horário,
através das entradas digitais.
Com a aplicação de +24 V na entrada digital programada para Avanço (DIx=4), o motor acelera no sentido
horário até atingir a referência de velocidade. Uma vez liberada a entrada de Avanço (0 V) e aplicado +24 V
na entrada programada para Retorno (DIx=5), o CFW-11 irá acionar o motor no sentido anti-horário até que o
mesmo atinja a referência de velocidade. Mais detalhes dessa função podem ser vistos na figura 13.6 (l).](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-210-2048.jpg)
![14-1
14
Frenagem Reostática
Frenagem Reostática
O conjugado de frenagem que pode ser obtido através da aplicação de inversores de frequência, sem resistores
de frenagem reostática, varia de 10 % a 35 % do conjugado nominal do motor.
Para se obter conjugados frenantes maiores, utiliza-se resistores para a frenagem reostática. Neste caso a
energia regenerada é dissipada no resistor montado externamente ao inversor.
Este tipo de frenagem é utilizada nos casos em que são desejados tempos de desaceleração curtos ou quando
forem acionadas cargas de elevada inércia.
Para o modo de controle vetorial existe a possibilidade de uso da “Frenagem Ótima”, eliminando-se, em
muitos casos, a necessidade da frenagem reostática.
14.1 Frenagem Reostática [28]
A função de Frenagem Reostática somente pode ser usada se um resistor de frenagem estiver conectado ao
CFW-11, assim como os parâmetros relacionados à mesma, devem estar ajustados adequadamente.
Veja a seguir a descrição dos parâmetros para saber como programar cada um deles.
P0153 – Nível de Frenagem Reostática
Faixa de
Valores:
339 a 400 V
585 a 800 V
585 a 800 V
585 a 800 V
585 a 800 V
809 a 1000 V
809 a 1000 V
924 a 1200 V
924 a 1200 V
Padrão: P0296 = 375 V
P0296 = 618 V
P0296 = 675 V
P0296 = 748 V
P0296 = 780 V
P0296 = 893 V
P0296 = 972 V
P0296 = 972 V
P0296 = 1174 V
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
28 Frenag. Reostática
Descrição:
O parâmetro P0153 define o nível de tensão para atuação do IGBT de frenagem, e deve estar compatível com a
tensão de alimentação.
Se P0153 é ajustado num nível muito próximo do nível de atuação da sobretensão (F022), a mesma pode ocorrer
antes que o resistor de frenagem possa dissipar a energia regenerada.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-211-2048.jpg)



![15-1
15
Falhas e Alarmes
Falhas e Alarmes
A estrutura de detecção de problemas no inversor está baseada na indicação de falhas e alarmes.
Na falha ocorrerá o bloqueio dos IGBTs e parada do motor por inércia.
O alarme funciona como um aviso para o usuário de que condições críticas de funcionamento estão ocorrendo
e que poderá ocorrer uma falha caso a situção não se modifique.
Para mais informações, consulte no manual do usuário CFW-11 o capítulo 6 - Diagnóstico de Problemas e
Manutenção e a seção Referência Rápida de Parâmetros, Falhas e Alarmes deste manual.
15.1 Proteção de Sobrecarga no Motor
A proteção de Sobrecarga no Motor baseia-se no uso de curvas que simulam o aquecimento e resfriamento do
motor em casos de sobrecarga, conforme normas IEC 60947-4-2 e UL 508C. Os códigos de falha e alarme
da proteção de sobrecarga do motor são respectivamente, F072 e A046.
A sobrecarga do motor é dada em função do valor de referência In x FS (corrente nominal do motor multiplicado
pelo fator de serviço), que é o valor máximo em que a proteção de sobrecarga não deve atuar, pois o motor
consegue trabalhar indefinidamente com esse valor de corrente sem danos.
Entretanto, para que essa proteção atue de forma adequada, estima-se a imagem térmica do motor, que
corresponde ao tempo de aquecimento e resfriamento do motor.
A imagem térmica, por sua vez, depende da constante térmica do motor, a qual é aproximada a partir da
potência e do número de pólos do motor.
A imagem térmica é importante para que seja dado um “derating” no tempo de atuação da falha, de forma
que se tenha tempos menores de atuação quando o motor estiver “a quente”.
Esta função aplica um "derating" no tempo de atuação da falha dependendo da frequência de saída fornecida
ao motor, pois para motores auto-ventilados haverá menor ventilação da carcaça em velocidades menores, e
o motor estará sujeito a um maior aquecimento. Assim, torna-se necessário diminuir o tempo de atuação da
falha, de modo a evitar a queima do motor.
Para garantir maior proteção em caso de religamento, essa função mantém as informações relativas à imagem
térmica do motor na memória não-volátil (EEPROM) do CFW-11. Desta forma, após o religamento do inversor,
a função utilizará o valor salvo na memória térmica para efetuar uma nova avaliação de sobrecarga.
O parâmetro P0348 configura o nível de proteção desejada para a função de sobrecarga do motor. As opções
possíveis são: Falha e Alarme, somente Falha, somente Alarme e função de sobrecarga do motor desabilitada.
O nível para atuação do alarme da proteção de sobrecarga do motor (A046) é ajustado via P0349.
Para mais informações, consulte na seção 15.3 - Proteções [45], os parâmetros P0156, P0157, P0158, P0159,
P0348, P0349.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-215-2048.jpg)
![Falhas e Alarmes
15-2
15
NOTA!
Para garantir a conformidade da proteção de sobrecarga do motor do CFW11 com a norma UL508C
observar o seguinte:
A corrente de "trip" é igual a 1.25 vezes a corrente nominal do motor (P0401) ajustada no menu
"Start-up Orientado".
O valor máximo permitido para o parâmetro P0398 (Fator Serviço Motor) e 1.15.
Os parâmetros P0156, P0157 e P0158 (Corrente sobrecarga 100 %, 50 % e 5 % da velocidade
nominal respectivamente) são ajustadas automaticamente quando o parâmetro P0401(Corrente
nominal do motor) e ou P0406 (Ventilação do motor) são ajustados no menu "Start-up Orientado".
Se os parâmetros P0156, P0157 e P0158 forem ajustados manualmente, o valor máximo permitido
para esses parâmetros é 1.05xP0401.
15.2 Proteção de Sobretemperatura do Motor
Atenção!
O PTC deve ter isolação reforçada de partes vivas do motor e instalação.
Esta função faz a proteção de sobretemperatura do motor através da indicação de alarme (A110) e falha (F078).
O motor precisa ter um sensor de temperatura do tipo PTC.
Uma saída analógica fornece corrente constante para o PTC (2 mA), enquanto uma entrada analógica do
inversor lê a tensão sobre o PTC e compara com os valores limites de falha ou alarme, consulte a tabela 15.1.
Quando estes valores são excedidos ocorre a indicação de falha ou alarme.
As saídas analógicas AO1 e AO2 do módulo de controle, bem como as saídas analógicas existentes nos
módulos de acessórios AO1-B e AO2-B (IOB) podem ser usadas para fornecer a corrente constante para o
PTC. Para isso, é necessário configurar as "DIP switch" da saída para corrente e programar o parâmetro da
função da saída para 13=PTC.
As entradas analógicas AI1 e AI2 do módulo de controle, assim como as entradas analógicas existentes
nos módulos de acessórios AI3 (IOB) e AI4 (IOA) podem ser usadas para ler a tensão no PTC. Para tanto é
necessário configurar as "DIP switch" da entrada para tensão e programar o parâmetro da função da entrada
para 4=PTC. Consulte na seção 15.3 - Proteções [45], o parâmetro P0351.
NOTA!
Para que essa função funcione adequadamente, é importante manter o(s) ganho(s) e offset(s) das
entradas e saídas analógicas nos valores padrões.
Tabela 15.1 - Níveis de atuação de A110 e F078
Situação PTC Tensão na AI
Entra em alarme A110 no aumento da temperatura RPTC
>3,51 kΩ VAI
>7,0 V
Entra em falha F078 no aumento da temperatura RPTC
>3,9 kΩ VAI
>7,8 V
Reseta Alarme A110 150 Ω < RPTC
<1,6 kΩ 0,3<VAI
<3,2 V
Permite reset da falha F078 150 Ω < RPTC
<1,6 kΩ 0,3<VAI
<3,2 V
Entra em falha F078 (detecção de resistência mínima) RPTC
<60 Ω <0,12 V](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-216-2048.jpg)

![Falhas e Alarmes
15-4
15
(d) AO2-B, Al3
Programar P0241 = 4;
Ajustar S3.1 = OFF (0 a 10 V) e
programar P0243 = 0 ou 2.PTC
XC3:
15
16
12
14
AI3
AO2-B (I)
I/OB
Figura 15.1 (cont.) (d) - Exemplos de conexões do PTC
15.3 Proteções [45]
Os parâmetros relacionados às proteções do motor e do inversor encontram-se nesse grupo.
P0030 – Temperatura do IGBT no Braço U
P0031 – Temperatura do IGBT no Braço V
P0032 – Temperatura do IGBT no Braço W
P0033 – Temperatura do Retificador
P0034 – Temperatura do Ar Interno
Faixa de
Valores:
-20.0 a 150.0 °C Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
45 Proteções
Descrição:
Esses parâmetros apresentam, em graus Celsius, as temperaturas do dissipador nos braços U, V e W (P0030,
P0031 e P0032), do retificador (P0033) e também do ar interno (P0034).
Eles são úteis para monitorar a temperatura nos principais pontos do inversor em um eventual sobreaquecimento
do mesmo.
P0156 – Corrente de Sobrecarga do Motor à 100 % Velocidade Nominal
P0157 – Corrente de Sobrecarga do Motor à 50 % da Velocidade Nominal](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-218-2048.jpg)
![15-5
15
Falhas e Alarmes
P0158 – Corrente de Sobrecarga do Motor a 5 % da Velocidade Nominal
Faixa de
Valores:
0.1 a 1.5 x Inom-ND
Padrão: P0156=1.05x Inom-ND
P0157=0.9x Inom-ND
P0158=0.65x Inom-ND
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
45 Proteções
Descrição:
Esses parâmetros são utilizados para proteção de sobrecarga do motor (Ixt - F072).
A corrente de sobrecarga do motor é o valor de corrente (P0156, P0157 e P0158) a partir do qual, o inversor
entenderá que o motor está operando em sobrecarga.
Quanto maior a diferença entre a corrente do motor e a corrente de sobrecarga, mais rápida será a atuação da
falha F072.
O parâmetro P0156 (Corrente de Sobrecarga do Motor à Velocidade Nominal) deve ser ajustado em um valor 5 %
acima da corrente nominal do motor utilizado (P0401).
A corrente de sobrecarga é dada em função da velocidade que está sendo aplicada ao motor, de acordo com a
curva de sobrecarga. Os parâmetros P0156, P0157 e P0158 são os três pontos utilizados para formar a curva de
sobrecarga do motor, conforme apresentado na figura 15.2.
% Velocidade Nominal
% P0401
P0156
0 5 50 100
110
105
100
98
90
65
0
P0157
Curva para motor com ventilação independente
Curva para motor autoventilado
P0158
Figura 15.2 - Níveis de proteção de sobrecarga
Com o ajuste da curva de corrente de sobrecarga, é possível programar um valor de sobrecarga que varia de acordo
com a velocidade de operação do motor (padrão de fábrica), melhorando a proteção para motores autoventilados,
ou um nível constante de sobrecarga para qualquer velocidade aplicada ao motor (motores com ventilação
independente).
Esta curva é automaticamente ajustada quando P0406 (Tipo de Ventilação do Motor) é programado durante a rotina
de "Start-up Orientado" (consulte a descrição deste parâmetro na seção 11.7 - Dados do Motor [43]).](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-219-2048.jpg)















![16-1
16
Parâmetros de Leitura [09]
Parâmetros de Leitura [09]
Para facilitar a visualização das principais variáveis de leitura do inversor, pode-se acessar diretamente o grupo
[09] – “Parâmetros de Leitura”.
É importante destacar que todos os parâmetros desse grupo podem apenas ser visualizados no display da
HMI, e não permitem alterações por parte do usuário.
P0001 – Referência de Velocidade
Faixa de
Valores:
0 a 18000 rpm Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
09 PARÂMETROS LEITURA
Descrição:
Esse parâmetro apresenta, independentemente da fonte de origem ajustada em P0221 ou P0222, o valor da
referência de velocidade em rpm (ajuste de fábrica).
A unidade da indicação pode ser alterada de rpm para outra unidade através de P0209, P0210 e P0211, bem
como a escala através de P0208 e P0212.
Através desse parâmetro também é possível alterar a referência de velocidade (P0121), quando P0221 ou P0222=0.
P0002 – Velocidade do Motor
Faixa de
Valores:
0 a 18000 rpm Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
09 PARÂMETROS LEITURA
Descrição:
Esse parâmetro indica o valor da velocidade real do motor em rpm (ajuste de fábrica), com filtro de 0.5 s.
A unidade da indicação pode ser alterada de rpm para outra unidade através de P0209, P0210 e P0211, assim
como a escala através de P0208 e P0212.
Através desse parâmetro também é possível alterar a referência de velocidade (P0121), quando P0221 ou
P0222=0.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-235-2048.jpg)
![Parâmetros de Leitura [09]
16-2
16
P0003 – Corrente do Motor
Faixa de
Valores:
0.0 a 4500.0 A Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
09 PARÂMETROS LEITURA
Descrição:
Indica a corrente de saída do inversor em Amperes (A).
P0004 – Tensão do Barramento CC (Ud
)
Faixa de
Valores:
0 a 2000 V Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
09 PARÂMETROS LEITURA
Descrição:
Indica a tensão atual no Barramento CC de corrente contínua em Volts (V).
P0005 – Frequência do Motor
Faixa de
Valores:
0.0 a 1020.0 Hz Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
09 PARÂMETROS LEITURA
Descrição:
Valor da frequência de saída do inversor, em Hertz (Hz).
P0006 – Estado do Inversor
Faixa de
Valores:
0 = Ready (Pronto)
1 = Run (Execução)
2 = Subtensão
3 = Falha
4 = Auto-Ajuste
5 = Configuração
6 = Frenagem CC
7 = STO
Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
09 PARÂMETROS LEITURA](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-236-2048.jpg)
![16-3
16
Parâmetros de Leitura [09]
Descrição:
Indica um dos 8 possíveis estados do inversor. Na tabela a seguir é apresentada a descrição de cada estado.
Para facilitar a visualização, o estado do inversor também é mostrado no canto superior esquerdo da HMI (figura
5.3 – seção 5.6 - Ajuste das Indicações do Display no Modo Monitoração). No caso dos estados 3 a 7, a
apresentação é feita de forma abreviada, como segue:
Tabela 16.1 - Descrição dos estados do inversor
Estado
Forma abreviada
apresentada no canto
esquerdo da HMI
Descrição
Ready Ready Indica que o inversor está pronto para ser habilitado
Run Run Indica que o inversor está habilitado
Subtensão Sub
Indica que o inversor está com tensão de rede insuficiente para operação (subtensão),
e não aceita comando de habilitação
Falha
Fxxx, onde xxx é o número
da falha ocorrida
Indica que o inversor está no estado de falha
Auto-Ajuste Aajuste Indica que o inversor está executando a rotina de Auto-Ajuste
Configuração Config
Indica que o inversor está na rotina de Start-up Orientado ou com programação de
parâmetros incompatível, ver a seção 5.7 - Incompatibilidade de Parâmetros.
Frenagem CC Fren.CC Indica que o inversor está aplicando a Frenagem CC para a parada do motor
STO STO
Indica que a Parada de Segurança está ativa (a tensão de 24 Vcc da bobina dos relés
de segurança foi removida)
P0007 – Tensão de Saída
Faixa de
Valores:
0 a 2000 V Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
09 PARÂMETROS LEITURA
Descrição:
Indica a tensão de linha estimada na saída do inversor, em Volts (V).
P0009 – Torque no Motor
Faixa de
Valores:
-1000.0 a 1000.0 % Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
09 PARÂMETROS LEITURA
Descrição:
Indica o torque desenvolvido pelo motor, calculado conforme a seguir:](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-237-2048.jpg)
![Parâmetros de Leitura [09]
16-4
16
P0009 =
Tm x 100 x Y
ITM
2) P0202 = 3:
ITM
= P04012
-
Id* x P0178 2 0.5
100
Y = 1 para N ≤
P0190 x Nsinc
P0400
Y =
Nsinc
x
P0190
para N >
P0190 x Nsinc
N P0400 P0400
ITM
= P04012
-
P0410 x P0178 2 0.5
100
1) P0202 ≠ 3:
em V/f ou VVW os ajustes são: P0178 = 100 % e
P0190 = 0,95 x P0400
Sendo:
Nsinc
= velocidade síncrona do motor;
N = velocidade atual do motor;
Tm
= Corrente de torque no motor;
ITM
= Corrente de torque nominal do motor.
P0010 – Potência de Saída
Faixa de
Valores:
0.0 a 6553.5 kW Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
09 PARÂMETROS LEITURA
Descrição:
Indica a potência elétrica na saída do inversor. Essa potência é determinada através da fórmula:
P0010 = 1.732 x P0003 x P0007 x P0011.
Sendo que: 1.732 = √3 ;
P0003 é a corrente de saída medida;
P0007 é a tensão de saída de referência (ou estimada);
P0011 é o valor do cosseno [(ângulo do vetor da tensão de saída de referência) – (ângulo do vetor da
corrente de saída medida)].](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-238-2048.jpg)
![16-5
16
Parâmetros de Leitura [09]
P0011 – Cos phi da Saída
Faixa de
Valores:
0.00 a 1.00 Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
09 PARÂMETROS LEITURA
Descrição:
Este parâmetro indica o valor do cosseno do ângulo entre a tensão estimada e a corrente de saída. Os motores
elétricos são cargas indutivas e, portanto, consomem potência reativa. Essa potência é trocada entre o motor e
o inversor e não produz potência útil. Conforme a condição de operação do motor a relação [potência reativa /
potência ativa] pode aumentar, resultando numa redução do cosseno Ø da saída.
P0012 – Estado DI8 a DI1
Consulte o item 13.1.3 - Entradas Digitais [40].
P0013 – Estado DO5 a DO1
Consulte o item 13.1.4 - Saídas Digitais / a Relé [41].
P0014 – Valor de AO1
P0015 – Valor de AO2
P0016 – Valor de AO3
P0017 – Valor de AO4
Consulte o item 13.1.2 - Saídas Analógicas [39].
P0018 – Valor de AI1
P0019 – Valor de AI2
P0020 – Valor de AI3
P0021 – Valor de AI4
Consulte o item 13.1.1 - Entradas Analógicas [38].
P0023 – Versão de Software
Para mais detalhes, consulte a seção 6.1 - Dados do Inversor.
P0027 – Configuração de Acessórios 1
P0028 – Configuração de Acessórios 2
P0029 – Configuração do Hardware de Potência
Consulte a seção 6.1 - Dados do Inversor.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-239-2048.jpg)
![Parâmetros de Leitura [09]
16-6
16
P0030 – Temperatura do IGBT no Braço U
P0031 – Temperatura do IGBT no Braço V
P0032 – Temperatura do IGBT no Braço W
P0033 – Temperatura do Retificador
P0034 – Temperatura do Ar Interno
Consulte a seção 15.3 - Proteções [45].
P0036 – Velocidade do Ventilador
Faixa de
Valores:
0 a 15000 rpm Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
09 PARÂMETROS LEITURA
Descrição:
Indica a velocidade atual do ventilador do dissipador, em rotações por minuto (rpm).
P0037 – Sobrecarga do Motor
Faixa de
Valores:
0 a 100 % Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
09 PARÂMETROS LEITURA
Descrição:
Indica o percentual de sobrecarga atual do motor. Quando este parâmetro atingir 100 % irá ocorrer falha
"Sobrecarga no Motor" (F072).
P0038 – Velocidade do Encoder
Faixa de
Valores:
0 a 65535 rpm Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
09 PARÂMETROS LEITURA
Descrição:
Indica a velocidade atual do encoder, em rotações por minuto (rpm), através de um filtro de 0.5 segundos.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-240-2048.jpg)
![16-7
16
Parâmetros de Leitura [09]
P0039 – Contador dos Pulsos do Encoder
Faixa de
Valores:
0 a 40000 Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
09 PARÂMETROS LEITURA
Descrição:
Este parâmetro mostra a contagem dos pulsos do encoder. A contagem pode ser incrementada de 0 até 40000
(giro Horário) ou decrementada de 40000 até zero (giro Anti-Horário). Esse parâmetro pode ser visualizado nas
saídas analógicas quando P0257=49 ou P0260=49. Consulte a seção 12.10 - Busca de Zero do Encoder.
P0040 – Variável de Processo PID
P0041 – Valor do Setpoint PID
Consulte a seção 20.6 - Parâmetros.
P0042 – Contador de Horas Energizado
Faixa de
Valores:
0 a 65535 h Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
09 PARÂMETROS LEITURA
Descrição:
Indica o total de horas que o inversor permaneceu energizado.
Este valor é mantido mesmo quando o inversor é desligado. O conteúdo de P0042 é gravado na EEPROM quando
é detectada a condição de subtensão no barramento CC.
P0043 – Contador de Horas Habilitado
Faixa de
Valores:
0.0 a 6553.5 h Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
09 PARÂMETROS LEITURA
Descrição:
Indica o total de horas que o inversor permaneceu habilitado.
Indica até 6553.5 horas, depois retorna para zero.
Ajustando P0204=3, o valor do parâmetro P0043 vai para zero.
Este valor é mantido mesmo quando o inversor é desligado. O conteúdo de P0043 é gravado na EEPROM quando
é detectada a condição de subtensão no barramento CC.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-241-2048.jpg)
![Parâmetros de Leitura [09]
16-8
16
P0044 – Contador de kWh
Faixa de
Valores:
0 a 65535 kWh Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
09 PARÂMETROS LEITURA
Descrição:
Indica a energia consumida pelo motor.
Indica até 65535 kWh, depois retorna para zero.
Ajustando P0204=4, o valor do parâmetro P0044 passa para zero.
Este valor é mantido mesmo quando o inversor é desligado. O conteúdo de P0044 é gravado na EEPROM quando
é detectada a condição de subtensão no barramento CC.
NOTA!
O valor indicado nesse parâmetro é calculado indiretamente, e não deve ser usado para mensurar
o consumo de energia.
P0045 – Horas com Ventilador Ligado
Faixa de
Valores:
0 a 65535 h Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
09 PARÂMETROS LEITURA
Descrição:
Indica o número de horas que o ventilador do dissipador permaneceu ligado.
Indica até 65535 horas, depois retorna para zero.
Ajustando P0204=2, o valor do parâmetro P0045 passa para zero.
Este valor é mantido mesmo quando o inversor é desligado. O conteúdo de P0045 é gravado na EEPROM quando
é detectada a condição de subtensão no barramento CC.
P0048 – Alarme Atual
P0049 – Falha Atual
Faixa de
Valores:
0 a 999 Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
09 PARÂMETROS LEITURA](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-242-2048.jpg)
![16-9
16
Parâmetros de Leitura [09]
Descrição:
Indicam o número do alarme (P0048) ou da falha (P0049) que eventualmente estejam presentes no inversor.
Para compreender o significado dos códigos utilizados para as falhas e alarmes, consulte o capítulo 15 - Falhas e
Alarmes, deste manual e o capítulo 6 - Diagnóstico de Problemas e Manutenção do manual do usuário.
16.1 Histórico de Falhas [08]
Neste grupo estão descritos os parâmetros que registram as últimas falhas ocorridas no inversor, juntamente
com outras informações relevantes para a interpretação da falha, como data, hora, velocidade do motor, etc.
NOTA!
Caso ocorra uma falha simultaneamente com a energização ou Reset do CFW-11, os parâmetros
referentes a está falha como data, hora, velocidade do motor, etc., poderão conter informações
inválidas.
P0050 – Última Falha
P0054 – Segunda Falha
P0058 – Terceira Falha
P0062 – Quarta Falha
P0066 – Quinta Falha
P0070 – Sexta Falha
P0074 – Sétima Falha
P0078 – Oitava Falha
P0082 – Nona Falha
P0086 – Décima Falha
Faixa de
Valores:
0 a 999 Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
08 HISTÓRICO FALHAS
Descrição:
Indicam os códigos da ocorrência da última à décima falha.
A sistemática de registro é a seguinte:
Fxxx → P0050 → P0054 → P0058 → P0062 → P0066 → P0070 → P0074 → P0078 → P0082 → P0086](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-243-2048.jpg)
![Parâmetros de Leitura [09]
16-10
16
P0051 – Dia/Mês da Última Falha
P0055 – Dia/Mês da Segunda Falha
P0059 – Dia/Mês da Terceira Falha
P0063 – Dia/Mês da Quarta Falha
P0067 – Dia/Mês da Quinta Falha
P0071 – Dia/Mês da Sexta Falha
P0075 – Dia/Mês da Sétima Falha
P0079 – Dia/Mês da Oitava Falha
P0083 – Dia/Mês da Nona Falha
P0087 – Dia/Mês da Décima Falha
Faixa de
Valores:
00/00 a 31/12 Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
08 HISTÓRICO FALHAS
Descrição:
Indicam o dia e mês da ocorrência da última à décima falha.
P0052 – Ano da Última Falha
P0056 – Ano da Segunda Falha
P0060 – Ano da Terceira Falha
P0064 – Ano da Quarta Falha
P0068 – Ano da Quinta Falha
P0072 – Ano da Sexta Falha
P0076 – Ano da Sétima Falha
P0080 – Ano da Oitava Falha
P0084 – Ano da Nona Falha](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-244-2048.jpg)
![16-11
16
Parâmetros de Leitura [09]
P0088 – Ano da Décima Falha
Faixa de
Valores:
00 a 99 Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
08 HISTÓRICO FALHAS
Descrição:
Indicam o ano da ocorrência da última à décima falha.
P0053 – Hora da Última Falha
P0057 – Hora da Segunda Falha
P0061 – Hora da Terceira Falha
P0065 – Hora da Quarta Falha
P0069 – Hora da Quinta Falha
P0073 – Hora da Sexta Falha
P0077 – Hora da Sétima Falha
P0081 – Hora da Oitava Falha
P0085 – Hora da Nona Falha
P0089 – Hora da Décima Falha
Faixa de
Valores:
00:00 a 23:59 Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
08 HISTÓRICO FALHAS
Descrição:
Indicam a hora da ocorrência da última à décima falha.
P0090 – Corrente no Momento da Última Falha
Faixa de
Valores:
0.0 a 4500.0 A Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
08 HISTÓRICO FALHAS](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-245-2048.jpg)
![Parâmetros de Leitura [09]
16-12
16
Descrição:
Registro da corrente fornecida pelo inversor no momento da ocorrência da última falha.
P0091 – Tensão no Barramento CC no Momento da Última Falha
Faixa de
Valores:
0 a 2000 V Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
08 HISTÓRICO FALHAS
Descrição:
Registro da tensão no Barramento CC do inversor no momento da ocorrência da última falha.
P0092 – Velocidade no Momento da Última Falha
Faixa de
Valores:
0 a 18000 rpm Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
08 HISTÓRICO FALHAS
Descrição:
Registro da velocidade do motor no momento da ocorrência da última falha.
P0093 – Referência no Momento da Última Falha
Faixa de
Valores:
0 a 18000 rpm Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
08 HISTÓRICO FALHAS
Descrição:
Registro da referência de velocidade no momento da ocorrência da última falha.
P0094 – Frequência no Momento da Última Falha
Faixa de
Valores:
0.0 a 1020 Hz Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
08 HISTÓRICO FALHAS
Descrição:
Registro da frequência de saída do inversor no momento da ocorrência da última falha.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-246-2048.jpg)
![16-13
16
Parâmetros de Leitura [09]
P0095 – Tensão do Motor no Momento da Última Falha
Faixa de
Valores:
0 a 2000 V Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
08 HISTÓRICO FALHAS
Descrição:
Registro da tensão do motor no momento da ocorrência da última falha.
P0096 – Estado das DIx no Momento da Última Falha
Faixa de
Valores:
Bit 0 = DI1
Bit 1 = DI2
Bit 2 = DI3
Bit 3 = DI4
Bit 4 = DI5
Bit 5 = DI6
Bit 6 = DI7
Bit 7 = DI8
Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
08 HISTÓRICO FALHAS
Descrição:
Indica o estado das entradas digitais no momento da ocorrência da última falha.
A indicação é feita por meio de um código hexadecimal, que quando convertido para binário indicará, através dos
números 1 e 0, os estados “Ativa” e “Inativa” das entradas.
Exemplo: Caso o código apresentado na HMI para o parâmetro P0096 seja 00A5, ele corresponderá à sequência
10100101, indicando que as entradas 8, 6, 3 e 1 estavam ativas no momento da ocorrência da última falha.
Tabela 16.2 - Exemplo de correspondência entre o código hexadecimal de P0096 e o estado das DIx
0 0 A 5
0 0 0 0 0 0 0 0 1 0 1 0 0 1 0 1
Sem relação com as DIx
(sempre zero)
DI8
Ativa
(+24 V)
DI7
Inativa
(0 V)
DI6
Ativa
(+24 V)
DI5
Inativa
(0 V)
DI4
Inativa
(0 V)
DI3
Ativa
(+24 V)
DI2
Inativa
(0 V)
DI1
Ativa
(+24 V)
P0097 – Estado das DOx no Momento da Última Falha
Faixa de
Valores:
Bit 0 = DO1
Bit 1 = DO2
Bit 2 = DO3
Bit 3 = DO4
Bit 4 = DO5
Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
08 HISTÓRICO FALHAS](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-247-2048.jpg)
![Parâmetros de Leitura [09]
16-14
16
Descrição:
Indica o estado das saídas digitais no momento da ocorrência da última falha.
A indicação é feita por meio de um código hexadecimal, que quando convertido para binário indicará, através dos
números 1 e 0, os estados “Ativa” e “Inativa” das saídas.
Exemplo: Caso o código apresentado na HMI para o parâmetro P0097 seja 001C, ele corresponderá à sequência
00011100, indicando que as saídas 5, 4 e 3 estavam ativas no momento da ocorrência da última falha.
Tabela 16.3 - Exemplo de correspondência entre o código hexadecimal de P0097 e o estado das DOx
0 0 1 C
0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 0
Sem relação com as DOx
(sempre zero)
Sem relação com as DOx
(sempre zero)
DO5
Ativa
(+24 V)
DO4
Ativa
(+24 V)
DO3
Ativa
(+24 V)
DO2
Inativa
(0 V)
DO1
Inativa
(0 V)
P0800 - Temperatura Fase U Book 1
P0801 - Temperatura Fase V Book 1
P0802 - Temperatura Fase W Book 1
P0803 - Temperatura Fase U Book 2
P0804 - Temperatura Fase V Book 2
P0805 - Temperatura Fase W Book 2
P0806 - Temperatura Fase U Book 3
P0807 - Temperatura Fase V Book 3
P0808 - Temperatura Fase W Book 3
P0809 - Temperatura Fase U Book 4
P0810 - Temperatura Fase V Book 4
P0811 - Temperatura Fase W Book 4
P0812 - Temperatura Fase U Book 5
P0813 - Temperatura Fase V Book 5
P0814 - Temperatura Fase W Book 5
P0834 - Estado das Entradas Digitais DIM1 e DIM2
Para mais detalhes, consulte a seção 15.3 - Proteções [45].](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-248-2048.jpg)
![17-1
17
Comunicação [49]
Comunicação [49]
Para a troca de informações via rede de comunicação, o CFW-11 dispõe de vários protocolos padronizados
de comunicação, como Modbus, CANopen, DeviceNet, Ethernet/IP.
Para mais detalhes referentes a configuração do inversor para operar nesses protocolos, consulte os manuais
de comunicação do CFW-11. A seguir estão descritos os parâmetros relacionados a Comunicação.
17.1 Interface Serial RS-232 e RS-485
P0308 – Endereço Serial
P0310 – Taxa de Comunicação Serial
P0311 – Configuração dos Bytes da Interface Serial
P0312 – Protocolo Serial
P0314 – Watchdog Serial
P0316 – Estado da Interface Serial
P0682 – Palavra de Controle via Serial / USB
P0683 – Referência de Velocidade via Serial/ USB
Parâmetros para configuração e operação da interface serial RS-232 e RS-485. Para descrição detalhada, consulte o
manual da comunicação RS-232/RS-485, fornecido em formato eletrônico no CD-ROM que acompanha o produto.
17.2 Interface CAN – CANopen/DeviceNet
P0684 – Palavra de Controle via CANopen/DeviceNet
P0685 – Referência de Velocidade via CANopen/DeviceNet
P0700 – Protocolo CAN
P0701 – Endereço CAN
P0702 – Taxa de Comunicação CAN
P0703 – Reset de Bus Off
P0705 – Estado do Controlador CAN
P0706 – Contador de Telegramas CAN Recebidos
P0707 – Contador de Telegramas CAN Transmitidos
P0708 – Contador de Erros de Bus Off
P0709 – Contador de Mensagens CAN Perdidas](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-249-2048.jpg)
![Comunicação [49]
17-2
17
P0710 – Instâncias de I/O DeviceNet
P0711 – Leitura #3 DeviceNet
P0712 – Leitura #4 DeviceNet
P0713 – Leitura #5 DeviceNet
P0714 – Leitura #6 DeviceNet
P0715 – Escrita #3 DeviceNet
P0716 – Escrita #4 DeviceNet
P0717 – Escrita #5 DeviceNet
P0718 – Escrita #6 DeviceNet
P0719 – Estado da Rede DeviceNet
P0720 – Estado do Mestre DeviceNet
P0721 – Estado da Comunicação CANopen
P0722 – Estado do Nó CANopen
Parâmetros para configuração e operação da interface CAN. Para descrição detalhada, consulte o manual da
comunicação CANopen ou manual da comunicação DeviceNet, fornecidos em formato eletrônico no CD-ROM que
acompanha o produto.
17.3 Interface Anybus-CC
P0686 – Controle Anybus-CC
P0687 – Referência de Velocidade via Anybus-CC
P0723 – Identificação da Anybus
P0724 – Estado da Comunicação Anybus
P0725 – Endereço da Anybus
P0726 – Taxa de Comunicação da Anybus
P0727 – Palavras I/O Anybus
P0728 – Leitura #3 Anybus
P0729 – Leitura #4 Anybus
P0730 – Leitura #5 Anybus](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-250-2048.jpg)
![17-3
17
Comunicação [49]
P0731 – Leitura #6 Anybus
P0732 – Leitura #7 Anybus
P0733 – Leitura #8 Anybus
P0734 – Escrita #3 Anybus
P0735 – Escrita #4 Anybus
P0736 – Escrita #5 Anybus
P0737 – Escrita #6 Anybus
P0738 – Escrita #7 Anybus
P0739 – Escrita #8 Anybus
Parâmetros para configuração e operação da interface Anybus-CC. Para descrição detalhada, consulte o manual da
comunicação Anybus-CC, fornecido em formato eletrônico no CD-ROM que acompanha o produto.
17.4 INTERFACE PROFIBUS DP
Parâmetros relacionados com a interface Profibus DP do Slot 3. Para interface Profibus DP do Slot 4 (Anybus, consulte
a seção 17.3 - Interface Anybus-CC).
P0741 – Perfil Dados Profibus
P0742 – Leitura #3 Profibus
P0743 – Leitura #4 Profibus
P0744 – Leitura #5 Profibus
P0745 – Leitura #6 Profibus
P0746 – Leitura #7 Profibus
P0747 – Leitura #8 Profibus
P0748 – Leitura #9 Profibus
P0749 – Leitura #10 Profibus
P0750 – Escrita #3 Profibus
P0751 – Escrita #4 Profibus
P0752 – Escrita #5 Profibus
P0753 – Escrita #6 Profibus](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-251-2048.jpg)
![Comunicação [49]
17-4
17
P0754 – Escrita #7 Profibus
P0755 – Escrita #8 Profibus
P0756 – Escrita #9 Profibus
P0757 – Escrita #10 Profibus
P0918 – Endereço Profibus
P0922 – Seleção Telegrama Profibus
P0944 – Contador de Falhas
P0947 – Número da Falha
P0963 – Taxa Comunicação Profibus
P0964 – Identificação Drive
P0965– Identificação Perfil
P0967 – Palavra de Controle 1
P0968 – Palavra de Status 1
Parâmetros para configuração e operação da interface Profibus DP. Para descrição detalhada, consulte o manual de
comunicação Profibus DP, fornecido em formato eletrônico no CD-ROM que acompanha o produto.
17.5 Estados e Comandos da Comunicação
P0313 – Ação para Erro de Comunicação
P0680 – Estado Lógico
P0681 – Velocidade em 13 bits
P0695 – Valor para as Saídas Digitais
P0696 – Valor 1 para Saídas Analógicas
P0697 – Valor 2 para Saídas Analógicas
P0698 – Valor 3 para Saídas Analógicas
P0699 – Valor 4 para Saídas Analógicas
P0799 - Atraso Atualização I/O
Parâmetros utilizados para monitoramento e controle do inversor CFW-11 utilizando interfaces de comunicação.
Para descrição detalhada, consulte o manual de comunicação de acordo com a interface utilizada. Estes manuais
são fornecidos em formato eletrônico no CD-ROM que acompanha o produto.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-252-2048.jpg)
![18-1
18
SoftPLC [50]
SoftPLC [50]
18.1 SoftPLC
A função softPLC permite que inversor de frequência assuma funções de CLP (Controlador Lógico Programável).
Para mais detalhes referentes a programação dessas funções no CFW-11, consulte o Manual SoftPLC do CFW-11.
A seguir estão descritos os parâmetros relacionados ao SoftPLC.
P1000 – Estado da SoftPLC
P1001 – Comando para SoftPLC
P1002 – Tempo Ciclo de Scan
P1010 até P1059 – Parâmetros SoftPLC
NOTA!
Os parâmetros P1010 a P1019 podem ser visualizados no Modo de Monitoração (consultar as
seções 5.4 - HMI [30] e 5.6 - Ajuste das Indicações do Display no Modo Monitoração).
NOTA!
O parâmetro P1011, quando for de escrita e estiver programado em P0205, P0206 ou P0207, pode
ter o seu conteúdo alterado no Menu de Monitoração(consultar a seção 5.6 - Ajuste das Indicações
do Display no Modo Monitoração) usando as teclas ou da HMI.
18.2 Configuração de I/O [07]
As entradas e saídas digitais a seguir são de uso exclusivo da função SoftPLC.
18.2.1 Entradas Digitais [40]
Os parâmetros a seguir serão visualizados na HMI quando o módulo IOC-01, IOC-02 ou IOC-03 estiver
conectado no slot 1 (conector XC41);
P0025 – Estado das Entradas Digitais DI9 a DI16
Faixa de
Valores:
Bit 0 = DI9
Bit 1 = DI10
Bit 2 = DI11
Bit 3 = DI12
Bit 4 = DI13
Bit 5 = DI14
Bit 6 = DI15
Bit 7 = DI16
Padrão: -
Propriedades: RO
Grupos de
acesso via HMI:
01 GRUPOS PARÂMETROS ou 07 CONFIGURAÇÃO I/O
40 Entradas Digitais 40 Entradas Digitais](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-253-2048.jpg)
![SoftPLC [50]
18-2
18
Descrição:
Através desse parâmetro é possível visualizar o estado das 8 entradas digitais (DI9 a DI16) do módulo IOC-01,
IOC-02 ou IOC-03.
A indicação é feita usando os números 1 ou 0 para representar, respectivamente, o estado “Ativo” ou “Inativo”
das entradas.
O estado de cada entrada é considerado como um dígito na sequência, sendo que a DI9 representa o dígito
menos significativo.
18.2.2 Saídas Digitais [41]
No módulo IOC-01 são disponibilizadas 4 saídas digitais por contato de relé: DO6 a DO9 (contato de relé
NA). No módulo IOC-02 são disponibilizadas 8 saídas digitais tipo coletor aberto: DO6 a DO13.
No módulo IOC-03 são disponibilizadas 7 saídas digitais do tipo PNP, isoladas galvanicamente, protegidas,
de 500 mA cada.
P0026 – Estado das Saídas Digitais DO6 a DO13
Faixa de
Valores:
Bit 0 = DO6
Bit 1 = DO7
Bit 2 = DO8
Bit 3 = DO9
Bit 4 = DO10
Bit 5 = DO11
Bit 6 = DO12
Bit 7 = DO13
Padrão: -
Propriedades: RO
Grupos de
acesso via HMI:
01 GRUPOS PARÂMETROS ou 07 CONFIGURAÇÃO I/O
41 Saídas Digitais 41 Saídas Digitais
Descrição:
Através desse parâmetro é possível visualizar o estado das 4 saídas digitais do módulo IOC-01, o estado das 8
saídas digitais do módulo IOC-02 ou o estado das 7 saídas digitais do módulo IOC-03.
A indicação é feita usando os números 1 ou 0 para representar, respectivamente, o estado “Ativo” ou “Inativo”
das saídas.
O estado de cada saída é considerado como um dígito na sequência, sendo que a DO6 representa o dígito menos
significativo.
Obs.: Quando o módulo IOC-01 é utilizado, as indicações dos bits DO10 a DO13 ficarão inativas.
Quando o módulo IOC-03 é ultilizado, a indicação do bit DO13 ficará inativo.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-254-2048.jpg)
![19-1
19
Função Trace [52]
Função Trace [52]
19.1 Função Trace
A função Trace é utilizada para registrar variáveis de interesse do CFW-11 (como corrente, tensão, velocidade)
quando ocorre um determinado evento no sistema (ex. alarme/falha, corrente alta, etc). Este evento no sistema,
por desencadear o processo de armazenamento dos dados, é chamado de "trigger" (disparo). As variáveis
armazenadas podem ser vistas sob a forma de gráficos usando-se SuperDrive G2 executando em um PC
conectado via USB ou Serial ao CFW-11.
A seguir são apresentados os parâmetros relacionados com essa função.
P0550 – Fonte de Trigger para o Trace
Faixa de
Valores:
0 = Inativo
1 = Referência de Velocidade
2 = Velocidade do Motor
3 = Corrente do Motor
4 = Tensão no Barramento CC
5 = Frequência do Motor
6 = Tensão de Saída
7 = Torque do Motor
8 = Variável do Processo
9 = Setpoint PID
10 = AI1
11 = AI2
12 = AI3
13 = AI4
Padrão: 0 = Inativo
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
52 Função Trace
Descrição:
Seleciona a variável que será utilizada como fonte de trigger para o Trace.
Este parâmetro não tem efeito quando P0552="Alarme", "Falha" ou "DIx".
Essas mesmas variáveis podem ser utilizadas também como sinal a ser adquirido, através dos parâmetros P0561
a P0564.
P0551 – Valor de Trigger para o Trace
Faixa de
Valores:
-100.0 a 340.0 % Padrão: 0.0 %
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
52 Função Trace](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-255-2048.jpg)
![Função Trace [52]
19-2
19
Descrição:
Define o valor para comparação com a variável selecionada em P0550.
O fundo de escala das variáveis selecionáveis como "trigger" é apresentado na tabela a seguir.
Tabela 19.1 - Fundo de escala das variáveis selecionáveis como trigger
Variável Fundo de Escala
Referência de Velocidade 100 % = P0134
Velocidade do Motor 100 % = P0134
Corrente do Motor 200 % = 2,0 x InomHD
Tensão no Barramento CC 100 % = Lim. Máx. P0151
Frequência do Motor 340 % = 3,4 x P0403
Tensão de Saída 100 % =1,0 x P0400
Torque no Motor 200 % = 2,0 x Inom Motor
Variável do Processo 100 % = 1,0 x P0528
Setpoint PID 100 % = 1,0 x P0528
AI1 100 % = 10 V/20 mA
AI2 100 % = 10 V/20 mA
AI3 100 % = 10 V/20 mA
AI4 100 % = 10 V/20 mA
Este parâmetro não tem efeito quando P0552=“Alarme”, “Falha” ou “DIx”.
P0552 – Condição de Trigger para o Trace
Faixa de
Valores:
0 = P0550* = P0551
1 = P0550* <> P0551
2 = P0550* > P0551
3 = P0550* < P0551
4 = Alarme
5 = Falha
6 = DIx
Padrão: 5 = Falha
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
52 Função Trace
Descrição:
Define a condição para iniciar a aquisição dos sinais. A tabela 19.2 detalha as opções disponíveis.
Tabela 19.2 - Descrição das opções do parâmetro P0552
Opção de P0552 Descrição
P0550* = P0551 Variável selecionada em P0550 igual ao valor ajustado em P0551
P0550* <> P0551 Variável selecionada em P0550 diferente do valor ajustado em P0551
P0550* > P0551 Variável selecionada em P0550 maior que o valor ajustado em P0551
P0550* < P0551 Variável selecionada em P0550 menor que o valor ajustado em P0551
Alarme Inversor com alarme ativo
Falha Inversor em estado de falha
DIx Entrada digital (seleção por P0263 – P0270)
Para P0552=6 (opção “DIx”), é necessário selecionar a opção “Trigger Trace” em um dos parâmetros P0263 a
P0270. Para mais detalhes, consulte o item 13.1.3 - Entradas Digitais [40].
Observações:
- Se P0552=6 e nenhuma DI estiver configurada para “Trigger Trace”, o trigger não ocorrerá;
- Se P0552=6 e múltiplas DIs forem configuradas para “Trigger Trace”, basta que uma delas esteja ativa para a
ocorrência do trigger;](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-256-2048.jpg)
![19-3
19
Função Trace [52]
- Se P0552≠6 e alguma DI for configurada para “Trigger Trace”, o trigger nunca ocorrerá pela ativação da DI;
- Estas três opções de parametrização não impedem que o inversor seja habilitado.
P0553 – Período de Amostragem do Trace
Faixa de
Valores:
1 a 65535 Padrão: 1
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
52 Função Trace
Descrição:
Define o período de amostragem (tempo entre dois pontos de amostra) como um múltiplo de 200 µs.
Para P0297=1.25 kHz, define o período da amostragem como um múltiplo de 400 µs.
P0554 – Pré-Trigger do Trace
Faixa de
Valores:
0 a 100 % Padrão: 0 %
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
52 Função Trace
Descrição:
Percentual de dados que serão registrados antes da ocorrência do evento de trigger.
P0559 – Memória Máxima para Trace
Faixa de
Valores:
0 a 100 % Padrão: 0 %
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
52 Função Trace
Descrição:
Define a quantidade máxima de memória que o usuário deseja reservar para pontos da Função Trace. A faixa de
ajuste, de 0 a 100 %, corresponde a solicitar reserva de 0 a 15 KB para a Função Trace.
Cada ponto armazenado pela Função Trace ocupa 2 bytes da memória. Este parâmetro define, indiretamente, o
número máximo de pontos que o usuário deseja armazenar com a Função Trace.
A área de memória utilizada pela Função Trace é compartilhada com a memória para o aplicativo da softPLC.
Quando, no inversor, houver aplicativo da softPLC, a quantidade de memória realmente disponível para a função
Trace pode ser menor do que o valor ajustado em P0559. A indicação da quantidade de memória realmente
disponível é feita no parâmetro de leitura P0560. Para mais detalhes, consulte a descrição de P0560.
Como padrão de fábrica, P0559=0 %. Neste caso, não há memória disponível para a Função Trace, pois os 15 KB
disponíveis estão reservados para aplicativos da softPLC.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-257-2048.jpg)
![Função Trace [52]
19-4
19
P0560 – Memória Disponível para Trace
Faixa de
Valores:
0 a 100 % Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
52 Função Trace
Descrição:
Mostra a quantidade de memória disponível para armazenar pontos da Função Trace. A faixa de variação, de 0 a
100 %, indica que de 0 a 15 KB estão disponíveis para a Função Trace.
Compartilhamento de memória com a softPLC:
A memória para a Função Trace é compartilhada com a memória para aplicativos da softPLC.
- Se P1000=0 (não há aplicativo da softPLC), é possível utilizar toda a área da memória para a Função Trace.
Neste caso, P0559 = P0560.
- Se P1000>0 (há aplicativo da softPLC no inversor), P0560 mostrará o menor valor entre P0559 e (100 % menos
a memória ocupada pelo aplicativo da softPLC).
Para poder operar a Função Trace, o usuário deve ajustar P0559 num valor maior que 0 %, e menor ou igual ao
apresentado em P0560. Se P0559 > P0560 e o usuário desejar utilizar mais memória para a Função Trace, deve-
se apagar o aplicativo da softPLC através do parâmetro P1001.
NOTA!
Caso P0559 > P0560 poderá ocorrer distorção no(s) sinal(is) observado(s).
P0561 – CH1: Canal 1 do Trace
P0562 – CH2: Canal 2 do Trace
P0563 – CH3: Canal 3 do Trace
P0564 – CH4: Canal 4 do Trace
Faixa de
Valores:
0 = Inativo
1 = Referência de Velocidade
2 = Velocidade do Motor
3 = Corrente do Motor
4 = Tensão no Barramento CC
5 = Frequência do Motor
6 = Tensão de Saída
7 = Torque do Motor
8 = Variável do Processo
9 = Setpoint PID
10 = AI1
11 = AI2
12 = AI3
13 = AI4
Padrão: P0561 = 1
P0562 = 2
P0563 = 3
P0264 = 0
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
52 Função Trace](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-258-2048.jpg)
![19-5
19
Função Trace [52]
Descrição:
Selecionam os sinais que serão registrados nos canais 1 a 4 da Função Trace.
As opções são as mesmas disponíveis em P0550. Selecionando a opção “Inativo”, a memória total disponível para
a Função Trace é distribuída entre os demais canais ativos.
P0571 – Inicia Trace
Faixa de
Valores:
0 = Inativo
1 = Ativo
Padrão: 0 = Inativo
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
52 Função Trace
Descrição:
Inicia a espera pelo trigger da Função Trace.
Como é um parâmetro que pode ser alterado com o motor girando, não é necessário, na HMI, pressionar "Salvar"
para que a espera pelo "Trigger" inicie.
Este parâmetro não tem efeito se não houver canal ativo, ou se não houver memória disponível para a Função
Trace (P0560=0).
P0571 retorna automaticamente para 0, por segurança, caso qualquer um dos parâmetros entre P0550 e P0564
seja alterado.
P0572 – Dia/Mês de Disparo do Trace
Faixa de
Valores:
00/00 a 31/12 Padrão:
P0573 – Ano de Disparo do Trace
Faixa de
Valores:
00 a 99 Padrão:
P0574 – Hora de Disparo do Trace
Faixa de
Valores:
00:00 a 23:59 Padrão:
P0575 – Segundo de Disparo do Trace
Faixa de
Valores:
00 a 59 Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
52 Função Trace](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-259-2048.jpg)
![Função Trace [52]
19-6
19
Descrição:
P0572 a P0575 registram a data e hora da ocorrência do disparo. Estes parâmetros e os pontos adquiridos pela
Função Trace não são salvos quando o inversor é desenergizado.
Existem duas possibilidades para que P0572 a P0575, sejam nulos:
- Nenhuma aquisição foi realizada após a energização do inversor, ou
- Trace foi realizado sem HMI conectada ao inversor (sem RTC).
P0576 – Estado da Função Trace
Faixa de
Valores:
0 = Inativo
1 = Aguardando Trigger
2 = Trigger ocorreu
3 = Trace concluído
Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
52 Função Trace
Descrição:
Indica se a Função Trace foi iniciada, se já houve disparo e se os sinais já foram completamente adquiridos.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-260-2048.jpg)
![20-1
20
Regulador PID [46]
Regulador PID [46]
20.1 Descrição e Definições
O CFW-11 dispõe da função especial REGULADOR PID, que pode ser utilizada para fazer o controle de um
processo em malha fechada. Essa função coloca um regulador proporcional, integral e derivativo superposto
ao controle normal de velocidade do CFW-11. Consulte o diagrama de blocos na figura 20.1.
O controle do processo é feito através da variação da velocidade do motor, mantendo o valor da variável do
processo (aquela que se deseja controlar) no valor desejado.
Exemplos de aplicação: o controle da vazão ou da pressão em uma tubulação, da temperatura de um forno
ou estufa, ou da dosagem de produtos químicos em tanques.
Para definir os termos utilizados por um controle PID, vamos usar um exemplo simples.
Uma motobomba é utilizada em um sistema de bombeamento de água onde se deseja controlar a pressão
desta no cano de saída da bomba. Um transdutor de pressão é instalado no cano e fornece um sinal de
realimentação analógico para o CFW-11, que é proporcional à pressão de água. Esse sinal é chamado de
variável do processo, e pode ser visualizado no parâmetro P0040. Um setpoint é programado no CFW-11
via HMI (P0525) ou através de uma entrada analógica (como um sinal de 0 a 10 V ou de 4 a 20 mA). O
setpoint é o valor desejado da pressão de água que se quer que a bomba produza, independente das variações
de demanda na saída da bomba em qualquer instante.
O CFW-11 irá comparar o setpoint com a variável do processo e controlar a rotação do motor para tentar
eliminar qualquer erro e manter a variável do processo igual ao setpoint. O ajuste dos ganhos P, I e D determina
a velocidade com que o inversor irá responder para eliminar esse erro.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-261-2048.jpg)
![Regulador PID [46]
20-2
20
DefiniçãodoSetpoint
(referênciadavariáveldeProcesso)
P0525
ReferênciaSetpoint
(Consulteafigura13.8)
P0221/P0222=0
Habilita
RealimentaçãoP0524
(Consulteasfiguras13.1e13.2)
P0040
P0528P0041
+
-
PID
acadêmico
P0133,P0134
P0527
-1
0=Direto
1=Reverso
TipodeAçãodo
ReguladorPID
Manual
(DIxAberta)
DI3
(P0265=22)
PID
acadêmico
P0522
P0521
+
+
+
Referênciade
Velocidade
Total
(Consultea
figura13.8)
P0520
Habilita
Referência
(Consulteafigura13.8)
P0523
P0221/P0222>0
P0524=0
P0524=3
P0528
P0529
AI4'
P0524=2
P0524=1
AI2'
AI3'
AI1'
Automático
(DIxFechada)
Figura 20.1 - Blocodiagrama da função Regulador PID](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-262-2048.jpg)
![20-3
20
Regulador PID [46]
20.2 Colocação em Funcionamento
Antes de fazer uma descrição detalhada dos parâmetros relacionados a essa função, apresentamos a seguir
um roteiro passo a passo para a colocação do regulador PID em operação.
NOTA!
Para que a função PID funcione adequadamente, é fundamental verificar se o inversor está configurado
corretamente para acionar o motor na velocidade desejada. Por isso, verifique os seguintes ajustes:
Boosts de torque (P0136 e P0137) e compensação de escorregamento (P0138), se estiver no
modo de controle V/f;
Ter executado o auto-ajuste se estiver no modo vetorial;
Rampas de aceleração e desaceleração (P0100 a P0103) e limitação de corrente (P0135 para
controles V/f e VVW ou P0169/P0170 para controle vetorial).
Configurando a Função PID
1) Selecionar função especial: Regulador PID (P0203=1)
Quando se habilita a função PID, fazendo P0203=1 via HMI, automaticamente são alterados os seguintes parâmetros:
P0205=10 (Seleção Parâmetro Leitura 1: Setpoint PID ≠);
P0206=9 (Seleção Parâmetro Leitura 2: Var. Processo ≠);
P0207=2 (Seleção Parâmetro Leitura 3: Veloc. Motor ≠);
P0223=0 (Seleção Sentido Giro Local: Horário);
P0225=0 (Seleção Fonte JOG Local: Inativo);
P0226=0 (Seleção Sentido Giro Remoto: Horário);
P0228=0 (Seleção Fonte JOG Remoto: Inativo);
P0236=3 (Função da Entrada AI2: Var. do Processo);
P0265=22 (Função da Entrada DI3: Manual/Automático).
A função da DI3, definida pelo parâmetro P0265, atuará da seguinte maneira:
Tabela 20.1 - Modo de operação da DI3 para P0265=22
DI3 Operação
0 (0 V) Manual
1 (24 V) Automático
2) Definir o tipo de ação do PID que o processo requer: direto ou reverso. A ação de controle deve ser direta
(P0527=0) quando é necessário que a velocidade do motor seja aumentada para incrementar a variável
do processo. Em caso contrário, selecionar reverso (P0527=1). Consulte a figura 20.2.
Exemplos:
a) Direto: Bomba acionada por inversor fazendo o enchimento de um reservatório, com o PID regulando o
nível do mesmo. Para que o nível (variável do processo) aumente, é necessário que a vazão aumente, o
que é conseguido com o aumento da velocidade do motor.
b) Reverso: Ventilador acionado por inversor fazendo o resfriamento de uma torre de refrigeração, com o PID
controlando a temperatura da mesma. Quando se quer aumentar a temperatura (variável do processo), é
necessário reduzir a ventilação, através da redução da velocidade do motor.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-263-2048.jpg)
![Regulador PID [46]
20-4
20
(a) Direto
(b) Reverso
Variável Processo
Variável Processo
Set Point
Set Point
ed = P0041 - P0040 (%)
er = P0040 - P0041 (%)
PID Direto (P0527 = 0)
PID Reverso (P0527 = 1)
P0040
P0040
P0041
P0041
P0535
P0535
AI2
AI2
t
t
t
(c) Modo Dormir
Velocidade Motor
Sendo:
ed ou er o desvio percentual para ativar o Modo Despertar (Wake-up).
Tempo para
Dormir
Modo Dormir
P0217=1
Modo Dormir
P0133 < P0291 < P0134
P0002
P0134
P0133
P0219
Figura 20.2 (a) a (c) - Tipos de ação do PID
3) Definir entrada da realimentação: a realimentação (medição da variável do processo) é feita sempre
via uma das entradas analógicas (selecionada em P0524). Para simplicidade desse roteiro, a entrada AI2
será selecionada (P0524=1).
4) Acertar a escala da variável de processo: o transdutor (sensor) a ser utilizado para realimentação da variável
de processo deve ter um fundo de escala de, no mínimo, 1.1 vezes o maior valor que se deseja controlar.
Exemplo: Se for desejado controlar uma pressão em 20 bar, deve-se escolher um sensor com fundo de escala
de, no mínimo, 22 bar (1.1 x 20).
Uma vez definido o sensor, deve-se selecionar o tipo de sinal a ser lido na entrada (se corrente ou tensão) e
ajustar a chave correspondente (S1 ou S2) à seleção feita.
Nesse roteiro, adotaremos que o sinal do sensor varia de 4 a 20 mA (configurar P0238=1 e chave S1.3=ON).
Depois, pode-se ajustar o ganho (P0237) e o offset (P0239) do sinal de realimentação para que a variável de
processo seja lida na entrada analógica com a maior resolução possível e sem saturação. Nesse caso, ajustar
os parâmetros P0237 e P0239, conforme o exemplo a seguir.
NOTA!
Para evitar a saturação da entrada analógica de realimentação durante sobrepicos de regulação, o
sinal deve variar entre 0 e 90 % (0 a 9 V / 4 a 18 mA). Essa adaptação pode ser feita alterando-se
o ganho da entrada analógica selecionada como realimentação.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-264-2048.jpg)
![20-5
20
Regulador PID [46]
Exemplo:
– Fundo de escala do transdutor (valor máximo na saída) = 25 bar (FS=25);
– Faixa de operação (faixa de interesse) = 0 a 15 bar (FO=15).
Optando por manter P0237=1.000 e P0239=0 (padrão de fábrica), que é o mais comum para a maioria
das aplicações:
– P0525=50 % (setpoint pela HMI) será equivalente ao valor de fundo de escala do sensor utilizado, ou seja,
0.5 x FS=12.5 bar. Assim, a faixa de operação (0 a 15 bar) representa 60 % do setpoint.
Se for necessário ajustar P0237:
– Considerando-se uma folga de 10 % para a faixa de medição da variável de processo (FM=1.1 x FO=16.5),
esta deve ser ajustada em 0 a 16.5 bar. Portanto, o parâmetro P0237 deve ser ajustado em:
P0237 =
FS
=
25
= 1.52
FM 16.5
Assim, um setpoint de 100 % representa 16.5 bar, ou seja, a faixa de operação, em percentual fica de 0 a
90.9 % (FO=15/16.5).
Se necessitar de ajuste do offset, deve-se configurar o parâmetro P0239 de acordo com a descrição detalhada
do item 13.1.1 - Entradas Analógicas [38].
Se desejar alterar a indicação na HMI da variável de processo, deve-se ajustar os parâmetros P0528 e P0529
conforme o fundo de escala do transdutor utilizado e de P0237 definido (consulte a descrição desses parâmetros
na seção 20.6 - Parâmetros). Os parâmetros P0530 a P0532 também podem ser configurados para ajustar
a unidade de engenharia da variável de processo.
Exemplo: Caso você queira ler “25.0 bar” para a velocidade máxima do motor, ajuste:
– P0528=250;
– P0529=1 (wxy.z);
– P0530=“b” ;
– P0531=“a”;
– P0532=“r”.
5) Ajustar referência (setpoint): definir o modo de operação (local/remoto) no parâmetro P0220 e a fonte
da referência nos parâmetros P0221 ou P0222, de acordo com a situação desejada.
No caso do setpoint ser definido via HMI, ajuste o parâmetro P0525 de acordo com a equação abaixo:
Setpoint (%) =
Valor desejado (variável de processo)
x
Ganho da AIx da
Fundo de escala do sensor Realimentação
x 100 %](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-265-2048.jpg)
![Regulador PID [46]
20-6
20
Exemplo: Dado um transdutor de pressão com saída de 4 a 20 mA e fundo de escala de 25 bar (ou seja,
4 mA=0 bar e 20 mA=25 bar) e P0237=2.000. Se for desejado controlar 10 bar, deve-se entrar
com o seguinte setpoint:
Setpoint (%) =
10 x 2 x 100 % = 80 %
25
No caso do setpoint ser definido via entrada analógica (AI1, por exemplo), configurar P0231=0 (Função Sinal
AI1: Ref. Velocidade) e P0233 (Sinal da Entrada AI1) de acordo com o tipo de sinal a ser lido pela entrada
(se corrente ou tensão).
Não programar P0221e/ou P0222=7 (E.P.).
6) Limites de velocidade: ajustar P0133 e P0134, conforme aplicação.
As leituras relacionadas automaticamente quando o inversor é energizado são:
- Leitura 1 - P0041 "Setpoint";
- Leitura 2 - P0040 "Variável de Processo";
- Leitura 3 - P0002 "Velocidade".
7) Indicação: Consulte o capítulo 5 - Instruções Básicas para Programação, deste manual.
Essas variáveis podem ainda ser visualizadas nas saídas analógicas (AOx), desde que os parâmetros que
definem a função dessas saídas sejam programados para tal.
Colocando em Operação
1) Operação Manual (DI3 aberta): mantendo a DI3 aberta (Manual), conferir a indicação da variável de
processo na HMI (P0040) com base em uma medição externa do valor do sinal de realimentação (transdutor)
na AI2.
Em seguida, variar a referência de velocidade até atingir o valor desejado da variável de processo. Só então
passar para o modo automático.
NOTA!
Se o setpoint estiver definido por P0525, o inversor irá ajustar automaticamente P0525 no valor
instantâneo de P0040 quando o modo for alterado de manual para automático (desde que
P0536=1).
Nesse caso, a comutação de manual para automático é suave (não há variação brusca de
velocidade).
2) Operação Automática (DI3 fechada): fechar a DI3 e fazer o ajuste dinâmico do regulador PID, ou seja, dos
ganhos proporcional (P0520), integral (P0521) e diferencial (P0522), verificando se a regulação está sendo
feita corretamente. Para isto, basta comparar o setpoint e a variável do processo e verificar se os valores
estão próximos. Veja também com que rapidez o motor responde a oscilações da variável de processo.
É importante ressaltar que o ajuste dos ganhos do PID é um passo que requer alguma tentativa e erro para
atingir o tempo de resposta desejado. Se o sistema responde rapidamente e oscila próximo ao setpoint, então
o ganho proporcional está muito alto. Se o sistema responde lentamente e demora para atingir o setpoint,
então o ganho proporcional está muito baixo, e deve ser aumentado. E caso a variável do processo não
atinja o valor requerido (setpoint), então o ganho integral deve ser ajustado.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-266-2048.jpg)
![20-7
20
Regulador PID [46]
Como resumo desse roteiro, apresenta-se a seguir um esquemático das conexões para a aplicação do CFW-11
como regulador PID, e também o ajuste dos parâmetros usados nesse exemplo.
15
17
18
12
13
11
1
2
3
4
5
6
DI1
DI3
DI4
COM
24VCC
DGND
+REF
AI1+
AI1-
-REF
AI2+
AI2-
Setpoint
via teclas
CFW-11
XC1
PE R S T U V W PE
Blindagem
PE UVW
DI1 - Gira / Para
DI3 - Manual / Automático
DI4 - Habilita Geral
Processo
Transdutor
de Pressão
0-25 bar
4-20 mA
Setpoint
via AI1
≥5 kW
PE
R
S
T
Rede Seccionadora
Fusíveis
off on
1
2
S1
3
4
Figura 20.3 - Exemplo de aplicação do CFW-11 como regulador PID
Tabela 20.2 - Ajuste dos parâmetros para o exemplo apresentado
Parâmetro Descrição
P0203=1 Seleção da função PID
P0527=0(1)
Tipo de ação do PID (Direto)
P0524=1(1)
Entrada AI2 para realimentação
P0238=1 Sinal da entrada AI2 (4 a 20 mA)
P0237=1.000(1)
Ganho da entrada AI2
P0239=0(1)
Offset da Entrada AI2
P0528=250 Fator de escala da variável de processo
P0529=1(1)
Forma de indicação da variável de processo (wxy.z)
P0220=1 Operação em situação remoto
P0222=0 Seleção da referência (HMI)
P0525=80% Setpoint PID
P0230=1 Zona morta (ativa)
P0205=10(2)
Seleção parâmetro de leitura 1 (Setpoint PID)
P0206=9(2)
Seleção parâmetro de leitura 2 (Variável Processo)
P0207=2(2)
Seleção parâmetro de leitura 3 (Velocidade Motor)
P0536=1(1)
Ajuste automático de P0525 (Ativo)
P0227=1(1)
Seleção Gira/Pára remoto (DIx)
P0263=1(1)
Função da entrada DI1 (Gira/Pára)
P0265=22(2)
Função da entrada DI3: Manual/Autom.
P0266=2 Função da entrada DI4 (Habilita Geral)
P0236=3(2)
Função da entrada AI2 (Variável de Processo)
P0520=1.000(1)
Ganho proporcional PID
P0521=0.043(1)
Ganho integral PID
P0522=0.000(1)
Ganho diferencial PID
(1)
Parâmetros já no padrão de fábrica.
(2)
Parâmetro configurado automaticamente pelo inversor.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-267-2048.jpg)
![Regulador PID [46]
20-8
20
20.3 Modo DORMIR (SLEEP)
O modo Dormir é um recurso útil para economizar energia quando se utilizar regulador PID. Consultar a
figura 20.2.
Em muitas aplicações com regulador PID desperdiça-se energia mantendo o motor girando na velocidade
mínima quando, por exemplo, continua aumentando a pressão ou o nível de um tanque.
O modo dormir funciona em conjunto com a lógica de parada (bloqueio por velocidade nula).
Para o modo dormir funcionar habilite a lógica de parada programando P0217=1 (ativa). A condição de bloqueio
é a mesma existente para a lógica de parada sem PID. Consulte a seção 12.6 - Lógica de Parada [35]. Porém
o ajuste de P0291 deve ser: P0133 < P0291 < P0134. Consulte a figura 20.2.
Para sair do modo dormir (modo despertar (Wake-up)), quando no modo PID e automático, além da condição
programada em P0218, é necessário que o erro do PID (a diferença entre o setpoint e a variável de processo)
seja maior que o valor programado em P0535.
PERIGO!
Quando no modo dormir o motor pode girar a qualquer momento em função das condições do
processo. Se desejar manusear o motor ou efetuar qualquer tipo de manutenção, desenergize o
inversor.
20.4 Telas do Modo de Monitoração
Quando utilizado o regulador PID a tela do modo monitoração pode ser configurada para mostrar as principais
variáveis na forma numérica ou em gráfico de barras, com as respectivas unidades de engenharia.
Um exemplo da HMI com essa configuração pode ser observado na figura 20.4, onde são mostrados a variável
de processo, o setpoint, ambos em BAR e a velocidade do motor em rpm. Consulte o capítulo 5 - Instruções
Básicas para Programação.
Run LOC 90rpm
16:54 Menu
5.0 bar
5.0 bar
990 rpm
Run LOC 90rpm
16:56 Menu
bar
bar
rpm
15%
5%
45%
Figura 20.4 - Exemplo da HMI no modo monitoração para a função Regulador PID](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-268-2048.jpg)
![20-9
20
Regulador PID [46]
20.5 Ligação de Transdutor a 2 Fios
Na configuração com 2 fios, o sinal do transdutor é compartilhado com a alimentação. A figura 20.5 apresenta
este tipo de ligação.
15
17
18
12
13
11
1
2
3
4
5
6
DI1
DI3
DI4
COM
24VCC
DGND
+REF
AI1+
AI1-
-REF
AI2+
AI2-
Setpoint
via teclas
CFW-11 off on
PE R S T U V W PE
Transdutor
de
Pressão
Processo
1
2
S1
3
4
Figura 20.5 - Ligação de transdutor ao CFW-11 com 2 fios
20.6 Parâmetros
Descreve-se agora de forma detalhada os parâmetros relacionados ao grupo Regulador PID [46].
P0040 – Variável de Processo PID
Faixa de
Valores:
0.0 a 100.0 % Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
46 Regulador PID
Descrição:
Parâmetro apenas de leitura que apresenta, em valores percentuais, o valor da variável de processo do Regulador
PID.
P0041 – Valor do Setpoint PID
Faixa de
Valores:
0.0 a 100.0 % Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
46 Regulador PID
Descrição:
Parâmetro apenas de leitura que apresenta, em valores percentuais, o valor do setpoint (referência) do Regulador
PID.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-269-2048.jpg)
![Regulador PID [46]
20-10
20
P0203 – Seleção de Função Especial
Faixa de
Valores:
0 = Nenhuma
1 = Regulador PID
Padrão: 0 = Nenhuma
Propriedades: CFG
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
46 Regulador PID
Descrição:
Habilita o uso da função especial Regulador PID, quando ajustado em 1.
Quando P0203 é alterado para 1, automaticamente são alterados os seguintes parâmetros:
P0205=10 (Seleção Parâmetros de Leitura 1);
P0206=9 (Seleção Parâmetros de Leitura 2);
P0207=2 (Seleção Parâmetros de Leitura 3);
P0223=0 (Seleção Sentido Giro Local: Horário);
P0225=0 (Seleção Fonte JOG Local: Inativo);
P0226=0 (Seleção Sentido Giro Remoto: Horário);
P0228=0 (Seleção Fonte JOG Remoto: Inativo);
P0236=3 (Função da Entrada AI2: Var. do Processo);
P0265=22 (Função da Entrada DI3: Manual/Autom.).
Uma vez habilitada a função Regulador PID, as funções JOG e sentido de giro ficam fora de ação. Os comandos
de Habilitação e Gira/Pára são definidos em P0220, P0224 e P0227.
P0520 – Ganho Proporcional PID
P0521 – Ganho Integral PID
Faixa de
Valores:
0.000 a 7.999 Padrão: P0520 = 1.000
P0521 = 0.043
P0522 – Ganho Diferencial PID
Faixa de
Valores:
0.000 a 3.499 Padrão: 0.000
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
46 Regulador PID
Descrição:
Esses parâmetros definem os ganhos da função Regulador PID, e devem ser ajustados de acordo com a aplicação
que está sendo controlada.
Alguns exemplos de ajustes iniciais para algumas aplicações são apresentados na tabela 20.3.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-270-2048.jpg)
![20-11
20
Regulador PID [46]
Tabela 20.3 - Sugestões para ajustes dos ganhos do regulador PID
Grandeza
Ganhos
Proporcional
P0520
Integral
P0521
Derivativo
P0522
Pressão em sistema pneumático 1 0.043 0.000
Vazão em sistema pneumático 1 0.037 0.000
Pressão em sistema hidráulico 1 0.043 0.000
Vazão em sistema hidráulico 1 0.037 0.000
Temperatura 2 0.004 0.000
Nível 1 Consulte a nota 0.000
NOTA!
No caso do controle de nível, o ajuste do ganho integral vai depender do tempo que leva para o
reservatório passar do nível mínimo aceitável para o nível que se deseja, nas seguintes condições:
1. Para ação direta o tempo deverá ser medido com a vazão de entrada máxima e vazão de saída
mínima;
2. Para ação reversa o tempo deverá ser medido com a vazão de entrada mínima e vazão de saída
máxima.
Uma fórmula para calcular um valor inicial de P0521 em função do tempo de resposta do sistema é apresentada
a seguir:
P0521=0.02 / t,
Onde: t=tempo (em segundos).
P0523 – Tempo de Rampa do PID
Faixa de
Valores:
0.0 a 999.0 s Padrão: 3.0 s
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
46 Regulador PID
Descrição:
Esse parâmetro ajusta o tempo da rampa do setpoint utilizado na função do Regulador PID. A rampa evita que
transições bruscas no setpoint cheguem ao Regulador PID.
O tempo padrão ajustado de fábrica (3.0 s) normalmente é adequado para a maioria das aplicações, como as
relacionadas na tabela 20.3.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-271-2048.jpg)
![Regulador PID [46]
20-12
20
P0524 – Seleção da Realimentação do PID
Faixa de
Valores:
0 = AI1
1 = AI2
2 = AI3
3 = AI4
Padrão: 1 = AI2
Propriedades: CFG
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
46 Regulador PID
Descrição:
Seleciona a entrada de realimentação (variável de processo) do regulador.
Após a escolha da entrada de realimentação, deve-se programar a função da entrada selecionada no parâmetro
P0231 (para AI1), P0236 (para AI2), P0241 (para AI3) ou P0246 (para AI4).
P0525 – Setpoint PID pela HMI
Faixa de
Valores:
0.0 a 100.0 % Padrão: 0.0 %
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
46 Regulador PID
Descrição:
Esse parâmetro permite o ajuste do setpoint do Regulador PID através das teclas da HMI, desde que P0221=0 ou
P0222=0 e se estiver operando no modo Automático. Caso a operação esteja em modo Manual, a referência via
HMI é ajustada no parâmetro P0121.
O valor de P0525 é mantido no último valor ajustado (backup) mesmo desabilitando ou desenergizando o inversor
quando P0120=1 (Ativa). Neste caso o valor de P0525 é gravado na EEPROM quando é detectada a condição
de subtensão no barramento CC.
P0527 – Tipo de Ação do PID
Faixa de
Valores:
0 = Direto
1 = Reverso
Padrão: 0 = Direto
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
46 Regulador PID
Descrição:
O tipo de ação do PID deve ser selecionado como “Direto” quando é necessário que a velocidade do motor
seja aumentada para fazer com que a variável do processo seja incrementada. Do contrário, deve-se selecionar
“Reverso”.
Tabela 20.4 - Seleção da ação do PID
Velocidade do Motor Variável do Processo Selecionar
Aumenta
Aumenta Direto
Diminui Reverso
Essa característica varia conforme o tipo de processo, mas a realimentação direta é a mais utilizada.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-272-2048.jpg)
![20-13
20
Regulador PID [46]
Em processos de controle de temperatura ou nível, o ajuste do tipo de ação vai depender da configuração. Por
exemplo: no controle de nível, se o inversor atua no motor que retira fluido do reservatório, a ação será reversa,
pois quando o nível aumenta o inversor deverá aumentar a rotação do motor para fazê-lo baixar. Caso o inversor
atue no motor que coloca fluido no reservatório, a ação será direta.
P0528 – Fator de Escala da Variável de Processo
Faixa de
Valores:
1 a 9999 Padrão: 1000
P0529 – Forma de Indicação da Variável de Processo
Faixa de
Valores:
0 = wxyz
1 = wxy.z
2 = wx.yz
3 = w.xyz
Padrão: 1 = wxy.z
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
46 Regulador PID
Descrição:
Esses parâmetros definem como será apresentada a variável de processo (P0040) e o Setpoint do PID (P0041).
O parâmetro P0529 define o número de casas decimais após a vírgula.
Já o parâmetro P0528 deve ser ajustado da seguinte forma:
P0528 =
Indicação F. S. V. Processo x (10)P0529
,
Ganho da Entrada Analógica
Onde: Indicação F. S. V. Processo = Valor do Fundo de Escala da Variável de Processo, que corresponde a 10 V/20 mA
na entrada analógica utilizada como realimentação.
Exemplo 1 (Transdutor de Pressão 0 a 25 bar – saída 4 a 20 mA):
- Indicação desejada: 0 a 25 bar (F.S.);
- Entrada de realimentação: AI3;
- Ganho AI3: P0242=1.000;
- Sinal AI3: P0243=1 (4 a 20 mA);
- P0529=0 (sem casa decimal após a vírgula).
P0528 =
25 x (10)0
= 25
1.000
Exemplo 2 (valores padrão de fábrica);
- Indicação desejada: 0.0 % a 100 % (F.S.);
- Entrada de realimentação: AI2;
- Ganho AI2: P0237=1.000;
- P0529=1 (uma casa decimal após a vírgula).
P0528 =
100.0 x (10)1
= 1000
1.000](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-273-2048.jpg)
![Regulador PID [46]
20-14
20
P0530 – Unidade de Engenharia 1 da Variável de Processo
P0531 – Unidade de Engenharia 2 da Variável de Processo
P0532 – Unidade de Engenharia 3 da Variável de Processo
Faixa de
Valores:
32 a 127 Padrão: P0530 = 37
P0531 = 32
P0532 = 32
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
46 Regulador PID
Descrição:
A unidade de engenharia da variável de processo é composta de três caracteres, os quais serão aplicados à
indicação dos parâmetros P0040 e P0041. O parâmetro P0530 define o caracter mais à esquerda, P0531 o do
centro e P0532 o da direita.
Os caracteres possíveis de serem escolhidos correspondem ao código ASCII de 32 a 127.
Exemplos:
A, B, ..., Y, Z, a, b, ..., y, z, 0, 1, ..., 9, #, $, %, (, ), *, +, ...
−Para indicar “bar”: −Para indicar “%”:
P0530=”b” (98) P0530=”%” (37)
P0531=”a” (97) P0531=” ” (32)
P0532=”r” (114) P0532=” ” (32)
P0533 – Valor da Variável de Processo X
P0534 – Valor da Variável de Processo Y
Faixa de
Valores:
0.0 a 100.0 % Padrão: P0533=90.0 %
P0534=10.0 %
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
46 Regulador PID
Descrição:
Esses parâmetros são usados nas funções das saídas digitais/a relé, com a finalidade de sinalização/alarme, e
irão indicar:
Variável do Processo > VPx e
Variável do Processo < VPy
Os valores são percentuais do fundo de escala da variável de processo:
P0040 =
(10)P0529
x 100 %
P0528](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-274-2048.jpg)
![20-15
20
Regulador PID [46]
P0535 – Saída N=0 PID
Faixa de
Valores:
0 a 100 % Padrão: 0 %
Propriedades:
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
46 Regulador PID
Descrição:
O parâmetro P0535 atua em conjunto com o parâmetro P0218 (Saída do Bloqueio por Velocidade Nula), for-
necendo a condição adicional para a saída do bloqueio. Com isso, é necessário que o erro do PID (a diferença
entre o setpoint e a variável de processo) seja maior que o valor programado em P0535 para que o inversor volte
a acionar o motor.
P0536 – Ajuste Automático de P0525
Faixa de
Valores:
0 = Inativo
1 = Ativo
Padrão: 1 = Ativo
Propriedades: CFG
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
46 Regulador PID
Descrição:
Quando o setpoint do regulador PID for via HMI (P0221/P0222=0) e P0536 estiver em 1 (ativo), ao comutar de
manual para automático o valor da variável de processo (P0040) será carregado em P0525. Com isso evitam-se
oscilações do PID na comutação de manual para automático.
P0538 – Histerese VPx/VPy
Faixa de
Valores:
0.0 a 5.0 % Padrão: 1.0%
Propriedades: -
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
46 Regulador PID
Descrição:
O valor de histerese programado será usado nas seguintes funções das saídas digitais e a relé:
Função: P02xy=(22) Variável de Processo > Vpx, e
P02xy=(23) Variável de Processo < Vpy.
Onde: Vpx = P0533 ± P0538; Vpy = P0534 ± P0538, e P02xy = P0275,..., P0280.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-275-2048.jpg)
![Regulador PID [46]
20-16
20
20.7 PID Acadêmico
O controlador implementado no CFW-11é do tipo acadêmico. Apresentam-se a seguir as equações que
caracterizam o PID Acadêmico, que é a base do algoritmo dessa função.
A função de transferência no domínio da frequência do regulador PID Acadêmico é:
y(s) = Kp x e(s) x [ 1 +
1
+ sTd]
sTi
Substituindo-se o integrador por uma somatória e a derivada pelo quociente incremental, obtêm-se uma aproxima-
ção para a equação de transferência discreta (recursiva) apresentada a seguir:
y(kTa) = y(k-1)Ta + Kp[(e(KTa) - e(k-1)Ta) + Kie(k-1)Ta + Kd(e(kTa) - 2e(k-1)Ta + e(k-2)Ta)]
sendo:
Kp (Ganho proporcional): Kp = P0520 x 4096;
Ki (Ganho Integral): Ki = P0521 x 4096 = [Ta/Ti x 4096 ];
Kd (Ganho Diferencial): Kd = P0522 x 4096 = [Td/Ta x 4096];
Ta = 0,02seg (período de amostragem do regulador PID);
SP* : referência, tem no máximo 13 bits (0 a 8191);
X: variável de processo (ou controlada), lida através de uma das entradas analógicas (AIx), tem no máximo
13 bits;
y(kTa): saída atual do PID, tem no máximo 13 bits;
y(k-1)Ta: saída anterior do PID;
e(kTa): erro atual [SP*(k) – X(k)];
e(k-1)Ta: erro anterior [SP*(k-1) – X(k-1)];
e(k-2)Ta: erro a duas amostragens anteriores [SP*(k-2) – X(k-2)].](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-276-2048.jpg)
![21-1
21
Controle Vetorial PM
CONTROLE VETORIAL PM
21.1 MOTORES SÍNCRONOS A ÍMÃS PERMANENTES (PMSM)
Os motores síncronos a ímãs permanentes são motores de corrente alternada com enrolamento de estator
trifásico, similar ao motor de indução, e rotor a ímãs permanentes. Os PMSM para aplicações industriais,
possuem FCEM e corrente de alimentação senoidais para que o torque desenvolvido seja suave. O CFW-11
está preparado para acionar os motores da linha Wmagnet, que apresentem construção do tipo pólos salientes
(ímãs interiores).
Motores de pólos lisos (ímãs superficiais) e de outros fabricantes poderão ser utilizados sob consulta.
Características principais da linha de motores Wmagnet:
- Indutância Lq maior que a Ld, em função das saliências produzidas no rotor, o que irá gerar o torque de
relutância;
- Faixa de Enfraquecimento de Campo: grande ([1...2]x a vel.Nominal);
- Maior proteção dos ímãs contra a força centrífuga;
- Maior rendimento que o motor de indução (não tem perdas RI2
no rotor), o que lhe garante menor
elevação da temperatura, menor volume e peso. Comparado com um motor de indução equivalente, o
volume do motor Wmagnet chega a ser 47 % menor, resultando em uma alta relação de torque/volume,
e uma redução de 36 % no peso. Para uma mesma relação de torque/potência, diminuindo-se o tamanho
da carcaça, o sistema de ventilação também é reduzido.
Os motores Wmagnet podem ser utilizados, onde a variação de velocidade com torque constante e alto
rendimento são requeridos, por exemplo, em compressores, exaustores, bombas e esteiras transportadoras.
E também em elevadores, onde o controle preciso de velocidade em baixas rotações, torque suave, baixos
níveis de vibração e ruído são fundamentais.
21.2 CONTROLE PM SENSORLESS E PM COM ENCODER
O controle vetorial desenvolvido para acionar os motores da linha Wmagnet possui uma estrutura muito
parecida à utilizada para os motores de indução, ver figuras 21.1 e 21.2.
Na região de torque constante o controle determina a referência da corrente id adequada para o motor
especificado. Desta forma o torque de relutância é adicionado ao torque produzido pelos ímãs e o motor
acelera com a máxima relação N.m/A e rápida resposta dinâmica. Acima da velocidade nominal o controle
aplica o enfraquecimento de campo através do controle da reação de armadura para que o motor acelere
com tensão nominal e potência constante.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-277-2048.jpg)



![21-5
21
Controle Vetorial PM
21.5 CONTROLE DE TORQUE
No controle vetorial é possível usar o inversor para controlar o torque do motor. Uma das configurações é a
que mantêm o regulador de velocidade saturado; a outra é a que seleciona controle de torque ou velocidade
através de entrada digital.
Faixa de controle de torque: 10 % a 180 %.
Precisão: ± 5 % do torque nominal.
Quando o regulador de velocidade está saturado positiva ou negativamente, a corrente de torque é limitada
por P0169 ou por P0170, respectivamente.
O torque no eixo do motor em % (mostrado em P0009) é dado por:
Iq* x P0401
IHD
Tmotor = x 20 [%]
Onde: Iq* em (Volts), tensão lida nas saídas analógicas AO1...AO4.
Ajustes para controle de torque:
Limitação de torque:
1. Via parâmetros P0169, P0170 (pela HMI, Serial ou Fieldbus). Consulte o item 11.8.6 - Limitação
Corrente Torque [95];
2. Pelas entradas analógicas AI1, AI2, AI3 ou AI4. Consulte o item 13.1.1 - Entradas Analógicas [38],
opção 2 (máxima corrente de torque).
Referência de velocidade:
3. Ajuste a referência de velocidade 10 %, ou mais, acima da velocidade de trabalho. Isso garante
que a saída do regulador de velocidade fique saturada no valor máximo permitido pelo ajuste
de limite de torque.
NOTA!
A corrente nominal do motor deve ser equivalente à corrente nominal do inversor, para que o controle
tenha a melhor precisão possível.
NOTA!
O controle de torque com o regulador de velocidade saturado, tem a função de proteção (limitar
a velocidade do motor sem provocar falha). Por exemplo: para um bobinador, na situação em que
o material em bobinamento rompe, o regulador sai da condição de saturado e passa a controlar a
velocidade do motor, a qual estará no valor fornecido pela referência de velocidade.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-281-2048.jpg)
![Controle Vetorial PM
21-6
21
21.6 DADOS DO MOTOR [43] E AUTO-AJUSTE [05] OU [94]
Nestes grupos estão relacionados os parâmetros para o ajuste dos dados do motor utilizado. Ajustá-los de
acordo com os dados de placa do motor, exceto P0405.
P0398 – Fator de Serviço do Motor
P0400 – Tensão Nominal do Motor
P0401 – Corrente Nominal do Motor
P0402 – Rotação Nominal do Motor
Faixa de
Valores:
0 a 18000 rpm Padrão: 1750 rpm
(1458 rpm)
Propriedades: CFG
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
43 Dados do Motor
Descrição:
Ajustar de acordo com o dado da placa do motor utilizado.
Para controle vetorial para motor PM, ajuste de 0 a 18000 rpm.
P0403 – Frequência Nominal do Motor
Faixa de
Valores:
0 a 300 Hz Padrão: 60 Hz
(50 Hz)
Propriedades: CFG
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
43 Dados do Motor
Descrição:
Ajustada automaticamente de acordo com a expressão:
P0402 x P0431
60
P0403 = [Hz]
P0404 – Potência Nominal do Motor
P0405 – Número de Pulsos do Encoder
P0408 – Auto-Ajuste
A função está Inativa.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-282-2048.jpg)

![Controle Vetorial PM
21-8
21
P0435 – Constante Ke
Faixa de
Valores:
0 a 400.0 Padrão: 100.0 V/krpm
Propriedades: CFG e PM
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
43 Dados do Motor
Obs.: Ke é a constante da tensão gerada. É uma característica do motor que determina a tensão gerada em
função da velocidade do motor. A unidade de engenharia usada é V/krpm (Volts/1000 rpm).
Descrição:
Valores obtidos dos dados de placa do motor.
NOTA!
Caso esta informação não esteja disponível, ela pode ser obtida usando o procedimento a seguir:
Acionar o motor sem carga, ajustando P0121=1000 rpm; após atingida essa velocidade, ler a
indicação de P0007. Desabilitar o inversor e ajustar a parcela à esquerda do ponto decimal de
P0435 com o valor lido em P0007.
21.7 CONTROLE VETORIAL PM [29]
21.7.1 Regulador de Velocidade [90]
Neste grupo são apresentados os parâmetros relacionados ao regulador de velocidade do CFW-11.
P0160 – Configuração do Regulador de Velocidade
P0161 – Ganho Proporcional do Regulador de Velocidade
P0162 – Ganho Integral do Regulador de Velocidade
P0163 – Offset de Referência Local
P0164 – Offset de Referência Remota
P0165 – Filtro de Velocidade
P0166 – Ganho Diferencial do Regulador de Velocidade](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-284-2048.jpg)
![21-9
21
Controle Vetorial PM
21.7.2 Regulador de Corrente [91]
Neste grupo aparecem os parâmetros relacionados ao regulador de corrente do CFW-11.
P0438 – Ganho Proporcional do Regulador de Corrente de Iq
P0440 – Ganho Proporcional do Regulador de Corrente de Id
Faixa de
Valores:
0.00 a 1.99 Padrão: P0438 = 0.80
P0440 = 0.50
P0439 – Ganho Integral do Regulador de Corrente de Iq
P0441 – Ganho Integral do Regulador de Corrente de Id
Faixa de
Valores:
0 a 1.999 Padrão: P0439 = 0.005
P0441 = 0.005
Propriedades: PM
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
29 Controle Vetorial
91 Regulador Corrente
21.7.3 Regulador de Fluxo [92]
P0190 – Tensão de Saída Máxima
Faixa de
Valores:
0 a 690 V Padrão: 0.95 x P0296.
Ajuste automático
durante a rotina de
Start-up Orientado:
0.95 x P0400.
Propriedades: PM e Vetorial
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
29 Controle Vetorial
92 Regulador Fluxo
Descrição:
Este parâmetro define o valor da tensão de saída máxima. Seu valor padrão está definido na condição em que a
tensão da rede é nominal.
A referência de tensão usada no regulador “Tensão de Saída Máxima” é diretamente proporcional a tensão da
rede de alimentação.
Se esta tensão aumentar, então a tensão de saída poderá aumentar até o valor ajustado no parâmetro P0400 -
Tensão Nominal do Motor.
Se a tensão de alimentação diminuir, a tensão de saída máxima diminuirá na mesma proporção.
NOTA!
Os parâmetros P0175...P0189 estão inativos.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-285-2048.jpg)
![Controle Vetorial PM
21-10
21
21.7.4 Limitação da Corrente de Torque [95]
P0169 – Máxima Corrente de Torque +
P0170 – Máxima Corrente de Torque -
Faixa de
Valores:
0.0 a 350.0 % Padrão: 125.0 %
Propriedades: PM e Vetorial
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
29 Controle Vetorial
95 Lim. Corr. Torque
Descrição:
Estes parâmetros limitam o valor da componente da corrente do motor que produz torque + (P0169) ou torque -
(P0170). O ajuste é expresso em percentual da corrente nominal do motor (P0401).
Caso alguma Entrada Analógica (AIx) esteja programada para a opção 2 (Máxima Corrente de Torque), P0169
e P0170 ficam inativos e a limitação de corrente será dada pela AIx. Neste caso o valor da limitação poderá ser
monitorado no parâmetro correspondente à AIx programada (P0018...P0021).
Na condição de limitação de torque a corrente do motor pode ser calculada por:
p0169 ou p0170(*)
x P0401
100
Imotor
=
O torque máximo desenvolvido pelo motor é dado por:
Tmotor
(%) = P0169 ou P0170
(*) Caso a limitação de corrente de torque seja fornecida por entrada analógica, substituir P0169 ou P0170
por P0018, P0019, P0020 ou P0021 de acordo com a AIx programada. Para mais detalhes consulte o item
13.1.1 - Entradas Analógicas [38].
NOTA!
Os parâmetros P0171, P0172 e P0173 estão inativos.
21.7.5 Regulador do Barramento CC [96]
Para a desaceleração de cargas de alta inércia ou com tempos de desaceleração pequenos, o CFW-11 dispõe da
função Regulador do Barramento CC, que evita o bloqueio do inversor por sobretensão no barramento CC (F022).
P0184 – Modo de Regulação da Tensão CC
Faixa de
Valores:
0 = Com perdas
1 = Sem perdas
2 = Habilita/Desabilita via DIx
Padrão: 1
Propriedades: CFG e Vetorial
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
29 Controle Vetorial
96 Regulador Barr. CC](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-286-2048.jpg)
![21-11
21
Controle Vetorial PM
Descrição:
Habilita ou desabilita a função Frenagem Sem Perdas na regulação da tensão CC, conforme tabela a seguir.
Tabela 21.1 - Modos de regulação da tensão CC
P0184 Ação
0 = Com perdas
(Frenagem Ótima)
Inativa. Se for utilizada, pode ocorrer F022 (sobretensão) durante a redução da velocidade.
1 = Sem perdas
Controle automático da rampa de desaceleração. A Frenagem Ótima está inativa. A rampa
de desaceleração é automaticamente ajustada para manter o barramento CC abaixo do nível
ajustado no P0185. Este procedimento evita a falha por sobretensão no barramento CC (F022).
Também pode ser usado com cargas excêntricas.
2 = Habilita/desabilita via DIx
DIx=24 V: A frenagem atua conforme descrito para P0184=1.
DIx=0 V: A Frenagem Sem Perdas fica inativa. A tensão do barramento CC será controlada
pelo parâmetro P0153 (Frenagem Reostática).
P0185 – Nível de Atuação da Regulação da Tensão do Barramento CC
P0186 – Ganho Proporcional do Regulador da Tensão do Barramento CC
P0187 – Ganho Integral do Regulador da Tensão do Barramento CC
21.7.6 Flying Start/Ride-Through [44]
P0321 – Ud para Falta de Rede
P0322 – Ud para Ride-Through
P0323 – Ud para Retorno da Rede
P0325 – Ganho Proporcional do Ride-Through
P0326 – Ganho Integral do Ride-Through
Faixa de
Valores:
0.000 a 9.999 Padrão: 0.128
Propriedades: PM e Vetorial
Grupos de
Acesso via HMI:
01 GRUPOS PARÂMETROS
44 FlyStart/RideThru](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-287-2048.jpg)
![Controle Vetorial PM
21-12
21
Descrição:
Esses parâmetros configuram o controlador PI do Ride-Through no modo vetorial, que é responsável por manter a
tensão do barramento CC no nível ajustado em P0322.
Consulte a
figura 21.1 ou 21.2.
Figura 21.3 - Controlador PI do Ride-Through
Normalmente o ajuste de fábrica para P0325 e P0326 é adequado para a maioria das aplicações. Não altere
esses parâmetros.
21.7.7 Frenagem CC [47]
21.7.8 Busca de Zero do Encoder
Estas funções estão Inativas.
21.8 COLOCAÇÃO EM FUNCIONAMENTO NO MODO DE CONTROLE VETORIAL PM
NOTA!
Leia todo o manual do usuário CFW-11 antes de instalar, energizar ou operar o inversor.
Sequência para instalação, verificação, energização e colocação em funcionamento:
a) Instale o inversor: de acordo com o capítulo 3 - Instalação e Conexão do manual do usuário CFW-11,
ligando todas as conexões de potência e controle.
b) Prepare o acionamento e energize o inversor: de acordo com a seção 5.1 - Preparação e Energização, do
manual do usuário CFW-11.
c) Ajuste a senha P0000=5: de acordo com a seção 5.3 - Ajuste da Senha em P0000, deste manual.
d) Ajuste o inversor para operar com a rede e o motor da aplicação: através do Menu “Start-up Orientado”
acesse P0317 e altere o seu conteúdo para 1, o que faz o inversor iniciar a rotina de “Start-up Orientado”.
A rotina de start-up orientado [02] apresenta na HMI os principais parâmetros em uma Sequência lógica. O ajuste
destes parâmetros prepara o inversor para operação com a rede e o motor da aplicação. Veja a Sequência na
figura 21.4.
O ajuste dos parâmetros apresentados no grupo [02], resulta na modificação automática do conteúdo de outros
parâmetros ou variáveis internas do inversor, conforme mostrado na figura 21.4 o que resultará numa operação
estável do controle, com valores adequados para obter o melhor desempenho do motor.
Durante a rotina de Start-up Orientado será indicado o estado “Config”(configuração) no canto superior esquerdo
da HMI.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-288-2048.jpg)
![21-13
21
Controle Vetorial PM
Parâmetros relacionados ao motor:
Programe o conteúdo dos parâmetros P0398, P0400...P0435 diretamente dos dados de placa do
motor.
e) Ajuste de parâmetros e funções específicos para a aplicação: programe as entradas e saídas digitais
e analógicas, teclas da HMI, de acordo com as necessidades da aplicação.
Para aplicações:
- Simples, que podem utilizar as entradas e saídas digitais e analógicas programadas com valores
padrão de fábrica, utilizando o Menu Aplicação Básica [04], consulte o item 5.2.3 - Ajuste dos
Parâmetros da Aplicação Básica, do manual do usuário do CFW-11.
- Que necessitem somente das entradas e saídas digitais e analógicas com programação diferente
do padrão de fábrica, utilize o Menu Configuração I/O [07].
- Que necessitem de funções como: Frenagem Reostática [28], Ride-Through [44], acesse estas
funções através do Menu Grupos de Parâmetros [01].
f) Verificação de funcionamento:
1) Ajuste a referência de velocidade (P0121) na rotação nominal (P0402) e acione o motor sem carga;
2) Com o motor em funcionamento na rotação nominal(P0402), ajuste a carga lentamente até atingir o valor
de corrente nominal (P0401).
Caso ocorra alguma falha ou sintoma a seguir relacionado, durante a execução das etapas 1. e 2., tente
eliminá-lo usando o(s) procedimento(s) descrito(s) para cada situação. Quando existir mais de um procedimento,
teste cada sugestão isoladamente e na ordem apresentada:
- Sobrecorrente na saída do inversor (F071)
1) Aumente o tempo da rampa de aceleração (P0100 ou P0102).
2) Aumente o ganho proporcional do regulador de velocidade (P0161) em passos de 1.0 até no máximo 20.0.
3) Aumente o ganho proporcional do regulador de corrente de iq (P0438) em passos de 0.10 até no máximo 1.50.
4) Verifique o ajuste de P0435.
5) Diminua em 5 % o valor da tensão máxima de saída (P0190).
6) Diminua a carga.
- Sobretensão no barramento CC (F022)
1) Ajuste P0185 conforme sugerido na tabela 11.9.
- Sobrevelocidade no motor (F150)
1) Ajuste os ganhos do regulador de velocidade conforme descrito no item 11.8.1 - Regulador de Velocidade [90].
2) Aumente o valor do ganho proporcional de iq (P0438) em passos de 0.10 até no máximo 1.50.
- Oscilação na velocidade
1) Siga o procedimento de ajuste para otimização do regulador de velocidade descrito no item 11.8.1 - Regulador
de Velocidade [90].
- Vibração no motor (em geral ocorre quando P0202=7)
1) Diminua o valor do ganho proporcional de id (P0440) em passos de 0.05 até mínimo 0.2.
2) Diminua o valor do ganho proporcional de iq (P0438) em passos de 0.05 até mínimo 0.8.
3) Diminua o valor do ganho proporcional de velocidade (P0161) em passos de 1.0 até no mínimo 4.](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-289-2048.jpg)
![Controle Vetorial PM
21-14
21
Seq. Ação/Resultado Indicação no display
1
- Modo Monitoração.
- Pressione “Menu”
(soft key direita).
Ready LOC 0rpm
13:48 Menu
0 rpm
0.0 A
0.0 Hz
2
- O grupo “00 TODOS
OA PARÂMETROS” já está
selecionado.
Ready LOC 0rpm
Sair 13:48 Selec.
00 TODOS PARAMETROS
01 GRUPOS PARAMETROS
02 START-UP ORIENTADO
03 PARAM. ALTERADOS
3
- O grupo “01 GRUPOS
DE PARÂMETROS” é
selecionado.
Ready LOC 0rpm
Sair 13:48 Selec.
00 TODOS PARAMETROS
01 GRUPOS PARAMETROS
02 START-UP ORIENTADO
03 PARAM. ALTERADOS
4
- O grupo “02
START-UP ORIENTADO” é
então selecionado.
- Pressione “Selec.”.
Ready LOC 0rpm
Sair 13:48 Selec.
00 TODOS PARAMETROS
01 GRUPOS PARAMETROS
02 START-UP ORIENTADO
03 PARAM. ALTERADOS
5
- O parâmetro “Start-up
Orientado P0317: Não” já
está selecionado.
- Pressione “Selec.”.
Ready LOC 0rpm
Sair 13:48 Selec.
Start-Up Orientado
P0317: Nao
6
- O conteúdo de
“P0317 = [000] Não”
é mostrado.
Ready LOC 0rpm
Sair 13:48 Salvar
P0317
Start-up Orientado
[000] Nao
7
- O conteúdo do parâmetro
é alterado para “P0317 =
[001] Sim”.
- Pressione “Salvar”.
Ready LOC 0rpm
Sair 13:48 Salvar
P0317
Start-up Orientado
[001] Sim
8
- Neste momento é iniciada
a rotina do
Start-up Orientado e o
estado “Config” é indicado
na parte superior esquerda
da HMI.
- O parâmetro “Idioma
P0201: Português” já está
selecionado.
- Se necessário, mude
o idioma pressionando
“Selec.”, em seguida
e
para selecionar o idioma e
depois pressione “Salvar”.
Config LOC 0rpm
Reset 13:48 Selec.
Idioma
P0201: Portugues
Tipo de Controle
P0202: V/F 60Hz
Seq. Ação/Resultado Indicação no display
9
- Ajuste o conteúdo de
P0202 pressionando
“Selec.”.
- Em seguida pressione
até selecionar a
opção desejada: [007] PM
Sensorless ou [006] PM
com Encoder.
- Depois pressione Salvar.
Config LOC 0rpm
Reset 13:48 Selec.
Idioma
P0201: Portugues
Tipo de Controle
P0202: V/F 60Hz
10
- Se necessário, altere o
conteúdo de P0296 de
acordo com a tensão de
rede utilizada. Para isto,
pressione “Selec.”. Esta
alteração afetará P0151,
P0153, P0185, P0321,
P0322, P0323 e P0400.
Config LOC 0rpm
Reset 13:48 Selec.
Tipo de Controle
P0202: PM Sensorless
Tensao Nominal Rede
P0296: 440 - 460 V
11
- Se necessário, altere o
conteúdo de P0298 de
acordo com a aplicação do
inversor. Para isto, pressione
“Selec.”. Esta alteração
afetará P0156, P0157,
P0158, P0169, P0170,
P0401 e P0404. O tempo
e o nível de atuação da
proteção de sobrecarga
nos IGBTs serão também
afetados.
Config LOC 0rpm
Reset 13:48 Selec.
Tensao Nominal Rede
P0296: 440 - 460 V
Aplicacao
P0298: Uso Normal (ND)
12
- Se necessário, ajuste o
conteúdo de P0398 de
acordo com o fator de
serviço do motor. Para isso,
pressione “Selec.”. Esta
alteração afetará o valor
de corrente e o tempo
de atuação da função de
sobrecarga do motor.
Config LOC 0rpm
Reset 13:48 Selec.
Aplicacao
P0298: Uso Normal (ND)
Fator Servico Motor
P0398: 1.15
13
- Se necessário, ajuste
o conteúdo de P0400
de acordo com a tensão
nominal do motor. Para
isto, pressione “Selec.”.
Esta alteração afetará
P0190.
Config LOC 0rpm
Reset 13:48 Selec.
Fator Sevico Motor
P0398: 1.15
Tensao Nominal Motor
P0400: 440V
Figura 21.4 - Start-up Orientado do modo vetorial PM](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-290-2048.jpg)

![Controle Vetorial PM
21-16
21
21.9 FALHAS E ALARMES
Quando o modo de controle for PM com Encoder (P0202=6), o reset de falhas será aceito apenas com o
motor parado. Exceto o reset da Falha F079 (Falha Sinais Encoder) que poderia ocorrer com o eixo do motor
em movimento. Entretanto, o motor deve estar parado para evitar problemas de funcionamento após o reset
da falha.
21.10 Parâmetros de Leitura [09]
P0009 – Torque no Motor
Faixa de
Valores:
-1000.0 a 1000.0 % Padrão:
Propriedades: RO
Grupos de
Acesso via HMI:
09 PARÂMETROS LEITURA
Descrição:
Indica o torque desenvolvido pelo motor em percentual da corrente nominal do motor (P0401). Usando a saída
analógica AO1 ou AO2 (módulo), AO3 ou AO4 programada para mostrar a referência da corrente de torque
(Iq*), pode-se calcular o valor do torque do motor através da fórmula:
Tmotor
= {Iq* x P0401 x 20 [%]} / IHD
Onde:
Iq* em (Volts);
IHD
é a corrente de HD do inversor (P0295).
21.11 LIMITES DE VELOCIDADE [22]
P0134 - Limites de Referência de Velocidade Máxima.
NOTA!
A velocidade máxima permitida é ajustada automaticamente no valor definido por:
P0134 limite
=Udmáx.
x 636 / P0435.
Tabela 21.2 - Tensão máxima do barramento CC
P0296 220/230 V 380 V...480 V 500 V...600 V 660/690 V
Udmáx. 400 V 800 V 1000 V 1200 V](https://image.slidesharecdn.com/weg-cfw-11-manual-de-programacao-0899-150401194950-conversion-gate01/75/Weg-cfw-11-manual-de-programacao-0899-5664-3-1x-manual-portugues-br-292-2048.jpg)


















































































