Baixado 12 vezes
















![30
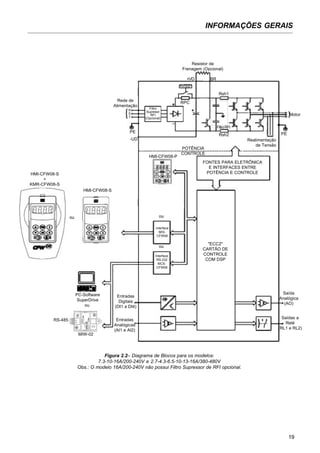
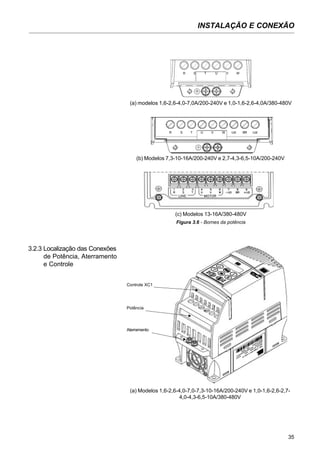
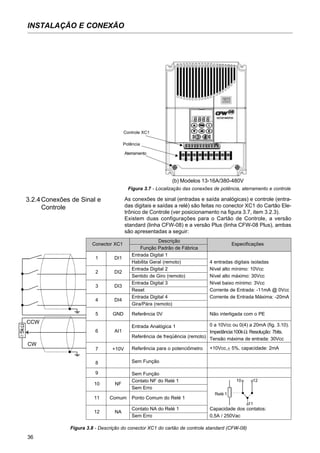
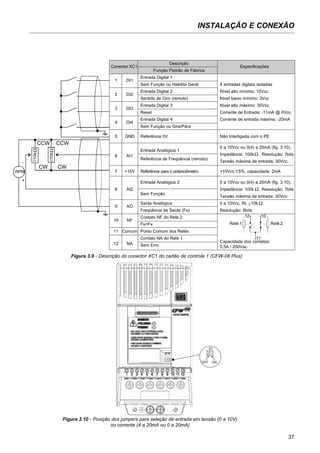
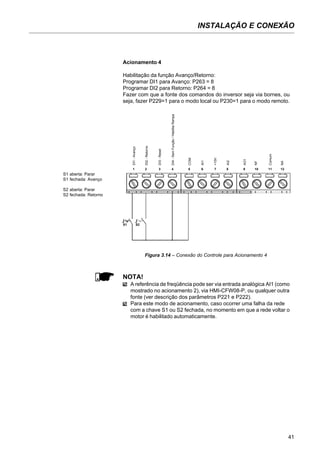
INSTALAÇÃO E CONEXÃO
Modelo
1,6A / 200-240V
2,6A / 200-240V
4,0A / 200-240V
7,0A / 200-240V
7,3A / 200-240V
10A / 200-240V
16A / 200-240V
1,0A / 380-480V
1,6A / 380-480V
2,6A / 380-480V
2,7A / 380-480V
4,0A / 380-480V
4,3A / 380-480V
6,5A / 380-480V
10A / 380-480V
13A / 380-480V
16A / 380-480V
Largura
L
[mm]
75
75
75
75
115
115
115
75
75
75
115
75
115
115
115
143
143
Altura
H
[mm]
151
151
151
151
200
200
200
151
151
151
200
151
200
200
200
203
203
Profundidade
P
[mm]
131
131
131
131
150
150
150
131
131
131
150
131
150
150
150
165
165
A
[mm]
64
64
64
64
101
101
101
64
64
64
101
64
101
101
101
121
121
B
[mm]
129
129
129
129
177
177
177
129
129
129
177
129
177
177
177
180
180
C
[mm]
5
5
5
5
7
7
7
5
5
5
7
5
7
7
7
11
11
D
[mm]
6
6
6
6
5
5
5
6
6
6
5
6
5
5
5
10
10
Parafuso
para Fixação
M4
M4
M4
M4
M4
M4
M4
M4
M4
M4
M4
M4
M4
M4
M4
M5
M5
Peso
[kg]
1,0
1,0
1,0
1,0
2,0
2,0
2,0
1,0
1,0
1,0
2,0
1,0
2,0
2,0
2,0
2,5
2,5
Grau de
Proteção
IP20 / NEMA1
IP20 / NEMA1
IP20 / NEMA1
IP20 / NEMA1
IP20 / NEMA1
IP20 / NEMA1
IP20 / NEMA1
IP20 / NEMA1
IP20 / NEMA1
IP20 / NEMA1
IP20 / NEMA1
IP20 / NEMA1
IP20 / NEMA1
IP20 / NEMA1
IP20 / NEMA1
IP20 / NEMA1
IP20 / NEMA1
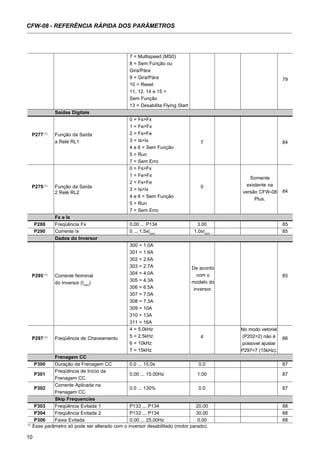
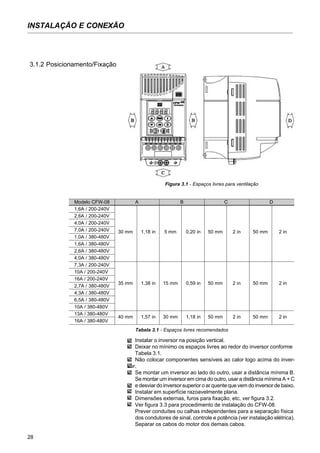
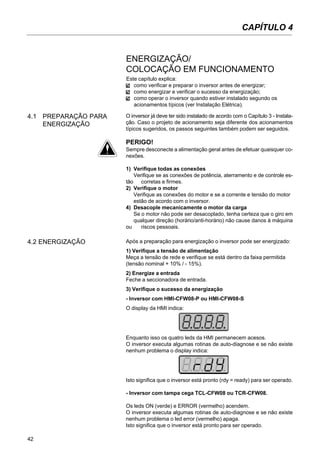
Dimensional Base de Fixação
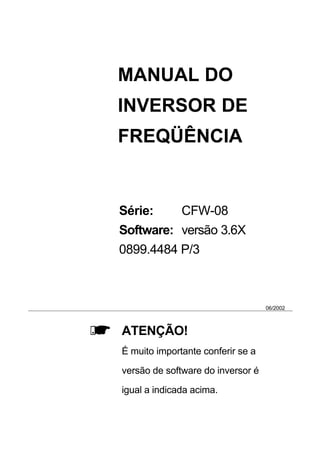
Tabela 3.2 - Dados para instalação (dimensões em mm) - ver item 9.1.
3.2 INSTALAÇÃO ELÉTRICA
3.2.1Conexões de Potência e
Aterramento
PERIGO!
Equipamento para seccionamento da alimentação: prever um equipa-
mento para seccionamento da alimentação do inversor. Este deve
seccionar a rede de alimentação para o inversor quando necessário
(por ex.: durante trabalhos de manutenção).
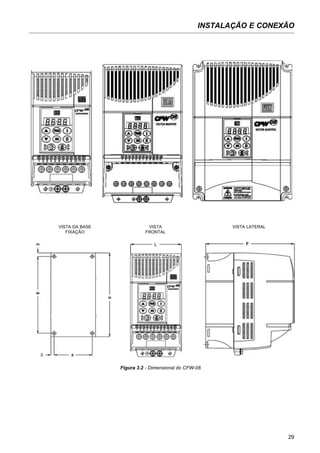
Figura 3.3 - Procedimento de instalação do CFW-08
FLUXO DE AR](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-30-320.jpg)
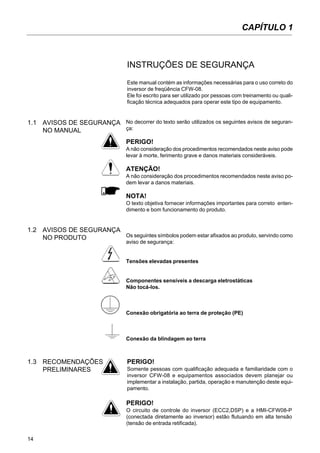
![INSTALAÇÃO E CONEXÃO
33
O inversor possui proteção eletrônica de sobrecarga do motor, que
deve ser ajustada de acordo com o motor específico. Quando diversos
motores forem conectados ao mesmo inversor utilize relés de sobrecarga
individuais para cada motor.
Manter a continuidade elétrica da blindagem dos cabos do motor.
Se uma chave isoladora ou contator for inserido na alimentação do
motor nunca opere-os com o motor girando ou com o inversor
habilitado.Manteracontinuidadeelétricadablindagemdoscabosdomotor.
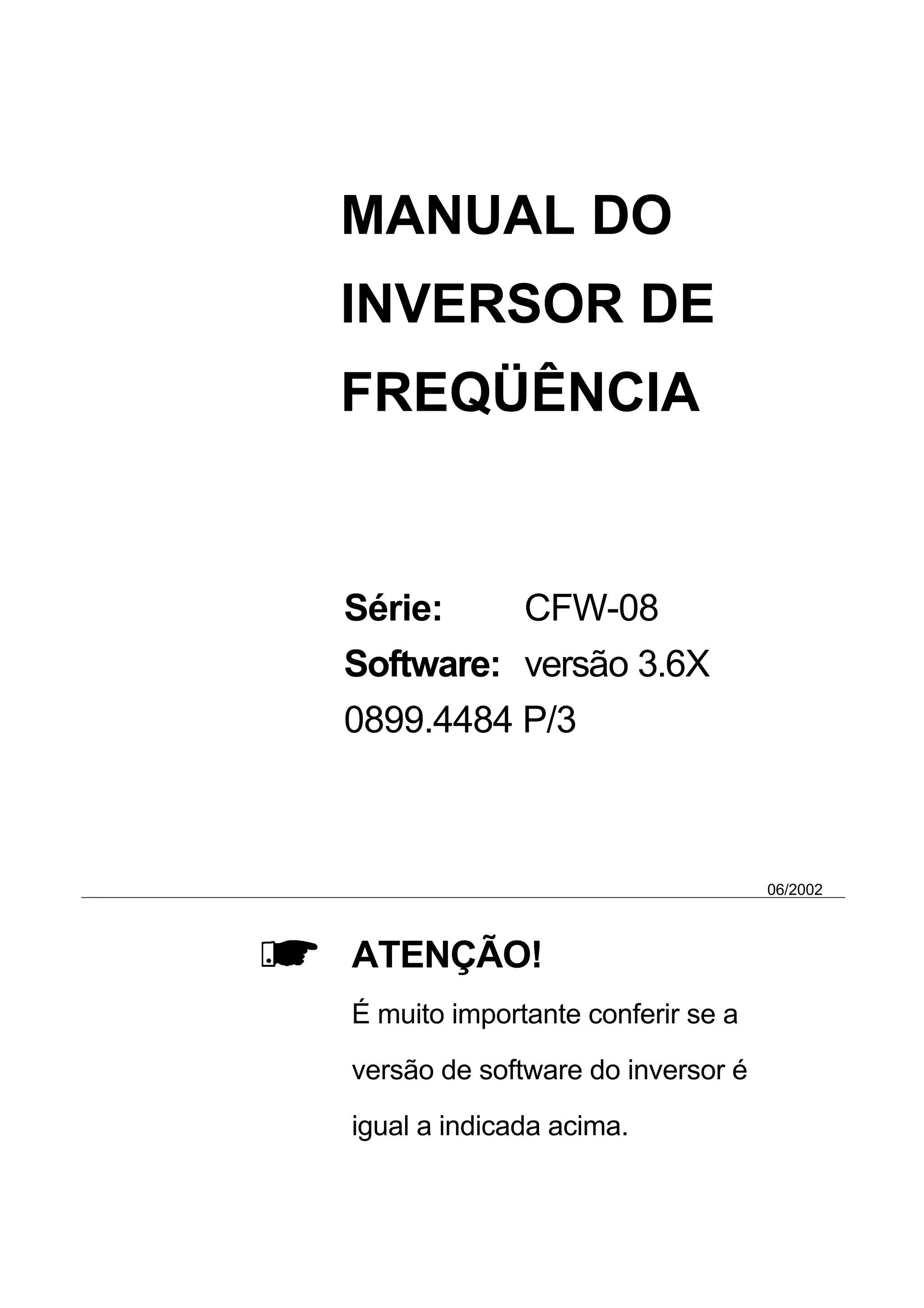
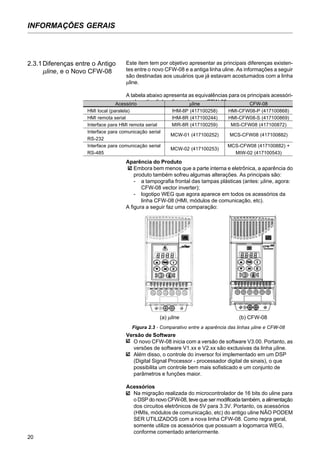
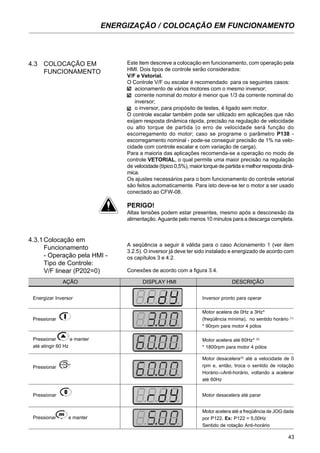
Utilizar no mínimo as bitolas de fiação e os disjuntores recomenda-
dos na tabela 3.3. O torque de aperto do conector é indicado na
tabela 3.4. Use somente fiação de cobre (70ºC).
Corrente
Nominal do
Inversor
[ A ]
1,0
1,6 (200-240V)
1,6 (380-480V)
2,6 (200-240V)
2,6 (380-480V)
2,7
4,0 (200-240V)
4,0 (380-480V)
4,3
6,5
7,0
7,3
10,0
13,0
16,0
Fiação de
Potência[ mm2
]
1,5
1,5
1,5
1,5
1,5
1,5
1,5
1,5
1,5
2,5
2,5
2,5
2,5
2,5
2,5
Fiação de
Aterramento
[ mm2
]
2,5
2,5
2,5
2,5
2,5
2,5
2,5
2,5
2,5
4,0
4,0
4,0
4,0
4,0
4,0
Corrente
4
10
4
10
6
6
15
10
10
15
10
20
30
30
35
Tabela 3.3 - Fiação e disjuntores recomendados - usar fiação de cobre (70ºC) somente
ATENÇÃO!
A rede que alimenta o inversor deve ter o neutro solidamente aterrado.
NOTA!
A tensão de rede deve ser compatível com a tensão nominal do
inversor.
A necessidade do uso de reatância de rede depende de vários fato-
res. Ver item 8.15.
Capacitores de correção do fator de potência não são necessários
na entrada (R, S e T) e não devem ser conectados na saída (U, V e
W).
Para os inversores com opção de frenagem reostática o resistor de
frenagem deve ser montado externamente. Ver como conectá-lo na
figura 8.21. Dimensionar de acordo com a aplicação respeitando a
corrente máxima do circuito de frenagem. Utilizar cabo trançado para
a conexão entre inversor-resistor. Separar este cabo dos cabos de
sinal e controle. Se o resistor de frenagem for montado dentro do pa-
inel, considerar o aquecimento provocado pelo mesmo no
dimensionamento da ventilação do painel.
Quando a interferência eletromagnética gerada pelo inversor for um
problema para outros equipamentos utilizar fiação blindada ou fia-
ção protegida por conduite metálico para a conexão saída do inver-
sor-motor. Conectar a blindagem em cada extremidade ao ponto de
aterramento do inversor e à carcaça do motor.
Sempre aterrar a carcaça do motor. Fazer o aterramento do motor
no painel onde o inversor está instalado, ou no próprio inversor. A
fiação de saída do inversor para o motor deve ser instalada separada
da fiação de entrada da rede bem como da fiação de controle e sinal.
Modelo
WEG
DMW25-4
DMW25-10
DMW25-4
DMW25-10
DMW25-6,3
DMW25-6,3
DMW25-16
DMW25-10
DMW25-10
DMW25-16
DMW25-10
DMW25-20
DW125H-32
DW125H-32
DW125H-40
Disjuntor](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-33-320.jpg)







![50
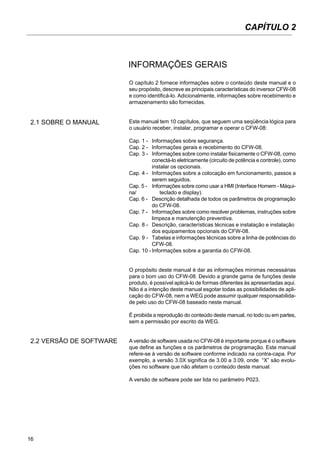
CAPÍTULO 5
USO DA HMI
Este capítulo descreve a Interface Homem-Máquina (HMI) standard do
inversor (HMI-CFW08-P) e a forma de usá-la, dando as seguintes infor-
mações:
descrição geral da HMI;
uso da HMI;
organização dos parâmetros do inversor;
modo de alteração dos parâmetros (programação);
descrição das indicações de status e das sinalizações.
5.1 DESCRIÇÃO DA
INTERFACE HOMEM -
MÁQUINA
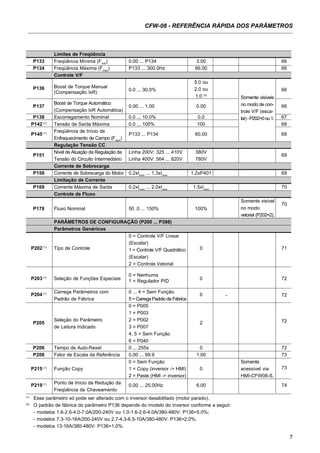
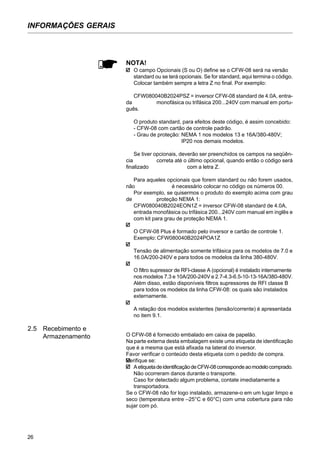
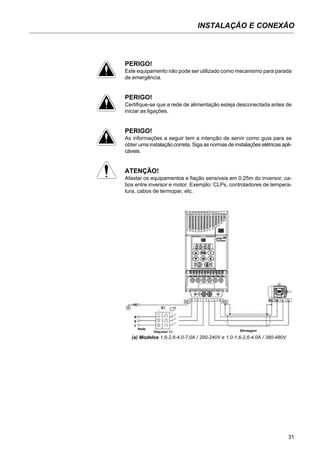
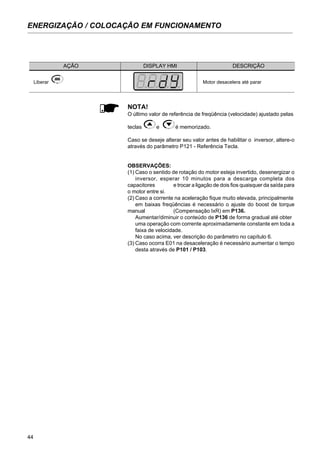
A HMI standard do CFW-08 contém um display de leds com 4 dígitos de
7 segmentos, 4 leds de estado e 8 teclas. A figura 5.1 mostra uma vista
frontal da HMI e indica a localização do display e dos leds de estado.
Display de Leds
Led "Local"
Led "Remoto"
Led "Horário"
Led "Anti-horário"
Figura 5.1 - HMI do CFW-08
Funções do display de leds:
Mostra mensagens de erro e estado (ver Referência Rápida de
Parâmetros, Mensagens de Erro e Estado), o número do parâmetro ou
o seu conteúdo. O display unidade (mais à direita) indica a unidade de
algumas variáveis [U = Volts, A = Ampéres, o
= Graus Célsius (o
C)]
Funções dos leds “Local” e “Remoto”:
Inversor no modo Local:
Led verde aceso e led vermelho apagado.
Inversor no modo Remoto:
Led verde apagado e led vermelho aceso.
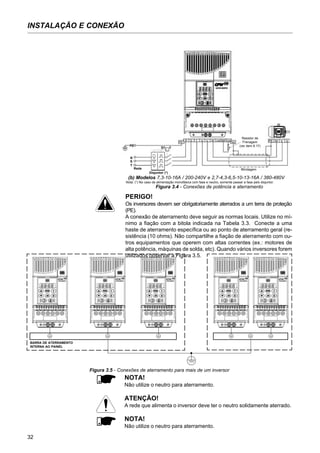
Funções dos leds de sentido de giro (horário e anti-horário).
Ver figura 5.2](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-50-320.jpg)
![51
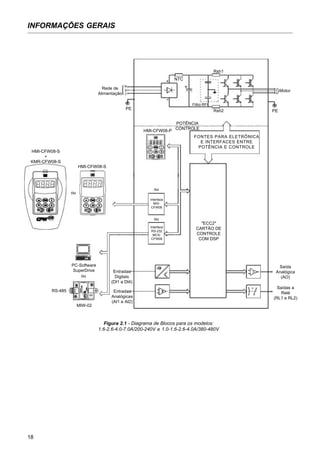
USO DA HMI
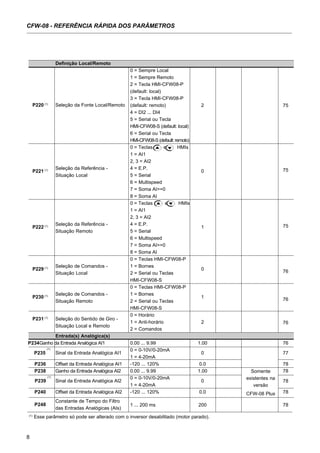
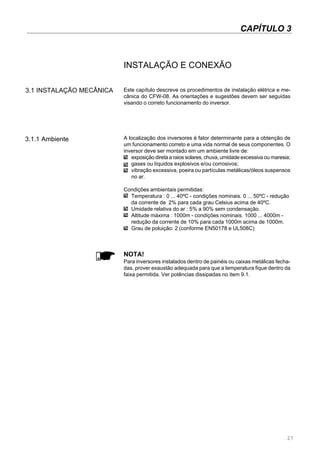
Funções básicas das teclas:
Habilita o inversor via rampa de aceleração (partida).
Desabilita o inversor via rampa de desaceleração (parada).
Reseta o inversor após a ocorrência de erros.
Seleciona (comuta) display entre número do parâmetro e seu valor
(posição/conteúdo).
Aumenta a velocidade, número do parâmetro ou valor do parâmetro.
Diminui a velocidade, número do parâmetro ou valor do parâmetro.
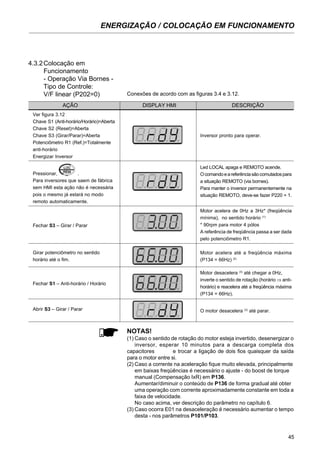
Inverte o sentido de rotação do motor comutando entre horário e
anti-horário.
Seleciona a origem dos comandos/referência entre LOCAL ou REMO-
TO.
Quando pressionada realiza a função JOG [se a(s) entrada(s) digital(is)
programada(s) para GIRA/PÁRA (se houver) estiver(em) aberta(s) e
a(s) entrada(s) digital(is) programada(s) para HABILITA GERAL (se
houver) estiver(em) fechada(s)].
A HMI é uma interface simples que permite a operação e a programa-
ção do inversor. Ela apresenta as seguintes funções:
indicação do estado de operação do inversor, bem como das variá-
veis principais;
indicação das falhas
visualização e alteração dos parâmetros ajustáveis;
operação do inversor (teclas , , , e ) e
variação da referência da velocidade (teclas e ).
5.2 USO DA HMI
Figura 5.2 - Indicações dos leds de sentido de giro (horário e anti-horário)
apagado
aceso
piscante
Comando de Seleção
do Sentido de Giro
Sentido de Giro
Situação dos Leds na
HMI
Horário
Anti-Horário
Horário
t
t
t](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-51-320.jpg)




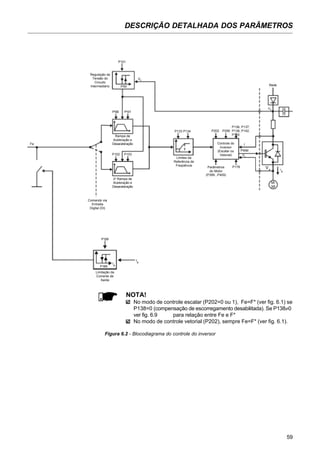

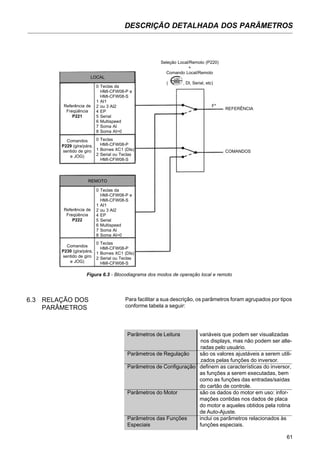
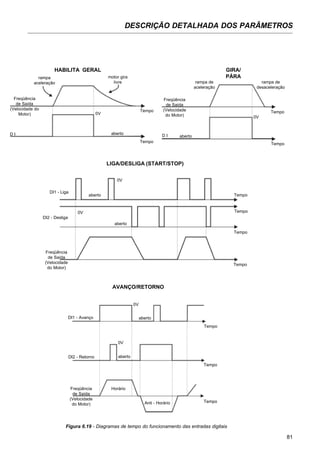
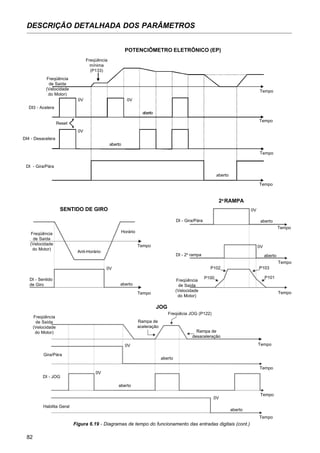
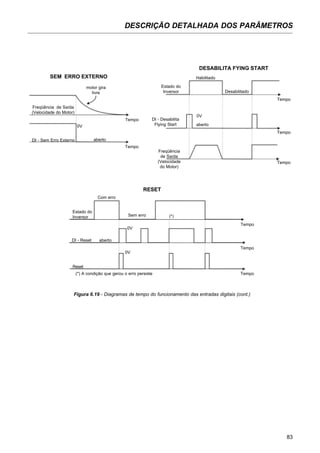
![62
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
P000 0...999
Parâmetro de [ 0 ]
Acesso 1
6.3.1 Parâmetros de Acesso e de Leitura - P000 ... P099
P002 0...6553
Valor Proporcional à [ - ]
Freqüência 0.01 (<100.0);
0.1 (<1000);
1 (>999.9)
P003 0...1.5 x Inom
Corrente de Saída [ - ]
(Motor) 0.01A (<10.0A);
0.1A (>9.99A)
P004 0...862V
Tensão de Circuito [ - ]
Intermediário 1V
Libera o acesso para alteração do conteúdo dos parâmetros.
O valor da senha é 5.
O uso de senha está sempre ativo.
Indica o valor de P208 x P005.
Quando for utilizado o modo de controle vetorial (P202=2), P002
indica o valor da velocidade real em rpm.
Para diferentes escalas e unidades usar P208.
Indica o valor eficaz da corrente de saída do inversor, em ampè-
res (A).
Indica a tensão atual no circuito intermediário, de corrente contínua,
em volts (V).
P005 0...300Hz
Freqüência de [ - ]
Saída (Motor) 0.01Hz (<100.0Hz);
0.1Hz (>99.99Hz)
Valor da freqüência de saída do inversor, em hertz (Hz).
P007 0...600V
Tensão de Sáida [ - ]
1V
Indica o valor eficaz da tensão de linha na saída do inversor, em
volts (V).
P008 25...110o
C
Temperatura do [ - ]
Dissipador 1o
C
Indica a temperatura atual do dissipador de potência, em graus
Celsius (°C).
A proteção de sobretemperatura do dissipador (E04) atua quando
a temperatura no dissipador atinge:
Inversor
1.6-2.6-4.0-7.0A/200-240V
1.0-1.6-2.6-4.0A/380-480V
7.3-10-16A/200-240V
2.7-4.3-6.5-10A/380-480V
13-16A/380-480V
P008 [°C] @ E04
103
90
90
103
103
P009 0.0...150.0%
Torque no Motor [ - ]
0.1%
Indica o torque mecânico do motor, em valor percentual (%) com
relação ao torque nominal do motor ajustado.
O torque nominal do motor é definido pelos parâmetros P402 (ve
locidade do motor) e P404 (potência do motor). Ou seja:
onde Tnom
é dado em N.m, Pnom
é a potência nominal do motor
em watts (W) - P404, e nnom
é a velocidade nominal do motor
em rpm - P402.
Tnom
= 9.55 .
Pnom
nnom
P014 00...41
Último Erro Ocorrido [ - ]
-
Indica o código referente ao último erro ocorrido.
O item 7.1 apresenta uma listagem dos possíveis erros, seus códigos
e possíveis causas.
Este parâme-
tro só é visível no
modo vetorial
(P202=2)](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-62-320.jpg)
![63
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
Indica a versão de software do inversor contida na memória do
DSP localizado no cartão de controle.
Os parâmetros P040, P203, P520 a P528 somente estão disponíveis
a partir da versão de software V3.50.
Indica o valor da variável de processo utilizada como realimentação
do regulador PID, em percentual (%).
A função PID somente está disponível a partir da versão de
software V3.50.
A escala da unidade pode ser alterada através de P528.
Ver descrição detalhada do regulador PID no item 6.3.5 -
Parâmetros das Funções Especiais.
Este conjunto de parâmetros define os tempos para acelerar line
armente de 0 até a freqüência nominal e desacelerar linearmente
da freqüência nominal até 0.
A freqüência nominal é definida pelo parâmetro:
- P145 no modo escalar (P202=0 ou 1);
- P403 no modo vetorial (P202=2).
Para o ajuste de fábrica o inversor segue sempre os tempos defi-
nidos em P100 e P101.
Se for desejado utilizar a 2a
rampa, onde os tempos das rampas de
a celeração e desaceleração seguem os valores programados
em P102 e P103, utilizar uma entrada digital. Ver parâmetros P263 ...
P265.
Tempos de aceleração muito curtos podem provocar, dependendo
da carga acionada, bloqueio do inversor por sobrecorrente (E00).
Tempos de desaceleração muito curtos podem provocar, depen-
dendo da carga acionada, bloqueio do inversor por sobretensão
no circuito intermediário (E01). Ver P151 para maiores detalhes.
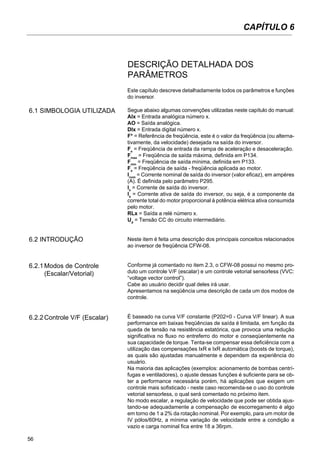
6.3.2 Parâmetros de Regulação - P100 ... P199
A rampa S reduz choques mecânicos durante acelerações e
desacelerações.
P104
0
1
2
Rampa S
Inativa
50%
100%
Freqüência de Saída
(Velocidade do Motor)
Linear
t (s)
taceleração
(P100/102)
tdesacelaração
(P101/103)
50% rampa S
100% rampa S
Figura 6.4 - Rampa S ou linear
É recomendável utilizar a rampa S com referências digitais de
freqüência (velocidade).
P023 x.yz
Versão de Software [ - ]
-
P040 0...P528
Variável de [ - ]
Processo (PID) 1
0.1...999s
[ 5.0s ]
0.1s (<100);
1s (>99.9)
0.1...999s
[ 10.0s ]
0.1s (<100);
1s (>99.9)
0.1...999s
[ 5.0s ]
0.1s (<100);
1s (>99.9)
0.1...999s
[ 10.0s ]
0.1s (<100);
1s (>99.9)
P104 0...2
Rampa S [ 0 - Inativa ]
-
P100
Tempo de
Aceleração
P101
Tempo de
Desaceleração
P102
Tempo de
Aceleração da
2a
Rampa
P103
Tempo de
Desaceleração da
2a
Rampa](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-63-320.jpg)
![64
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
P120 0...2
Backup da [ 1 - ativo ]
Referência Digital -
Define se o inversor deve ou não memorizar a última referência
digital utilizada.
P120
0
1
2
Backup da Referência
Inativo
Ativo
Ativo, mas sempre dado por P121,
independentemente da fonte de referência
Se o backup da referência digital estiver inativo (P120=0), sempre
que o inversor for habilitado a referência de freqüência (velocidade)
será igual à freqüência mínima, conforme o valor de P133.
Para P120=1, o inversor automaticamente armazena o valor da
referência digital (seja qual for a fonte de referência - tecla, EP ou
serial) sempre que ocorra o bloqueio do inversor, seja por condição
de desabilita (rampa ou geral), erro ou subtensão.
No caso de P120=2, sempre que o inversor for habilitado a sua
referência inicial é dada pelo parâmetro P121, a qual é memorizada,
independentemente da fonte de referência. Exemplo de aplicação:
referência via EP na qual o inversor é bloqueado via entrada digital
desacelera EP (o que leva a referência a 0). Porém, numa nova
habilitação, é desejável que o inversor volte para uma freqüência
diferente da freqüência mínima, a qual é armazenada em P121.
P121 P133...P134
Referência de [ 3.00Hz ]
Freqüência pelas 0.01Hz (<100.0);
teclas e
0.1Hz (>99.99)
Define o valor da referência tecla, a qual pode ser ajustada
utilizando-se as teclas e quando os parâmetros P002
ou P005 estiverem sendo mostrados no display das HMIs local e
remota.
As teclas e estão ativas se P221=0 (modo local) ou
P222=0 (modo remoto).O valor de P121 é mantido no último valor
ajustado mesmo desabilitando ou desenergizando o inversor, desde
que P120=1 ou 2 (backup ativo).
Tecla da HMI-CFW08-P
Tecla da HMI-CFW08-S
DI3
DI4
Serial
Define a referência de freqüência (velocidade) para a função JOG.
A ativação da função JOG pode ser feita de várias formas:
P122 P133...P134
Referência JOG [ 5.00Hz ]
0.01Hz (<100.0);
0.1Hz (>99.99)
P229=0 (modo local) ou
P230=0 (modo remoto)
P229=2 (modo local) ou
P230=2 (modo remoto)
P265=3 e P229=1 (local) ou
P230=1 (remoto)
P266=3 e P229=1 (local) ou
P230=1 (remoto)
P229=2 (modo local) ou
P230=2 (modo remoto)
O inversor deve estar desabilitado por rampa (motor parado) para
a função JOG funcionar. Portanto, se a fonte dos comandos for
via bornes, deve existir pelo menos uma entrada digital programada
para gira/pára (caso contrário ocorre E24), a qual deve
estar desligada para habilitar a função JOG via entrada digital.
O sentido de rotação é definido pelo parâmetro P231.](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-64-320.jpg)
![65
DESCRIÇÃO DETALHADA DOS PARÂMETROS
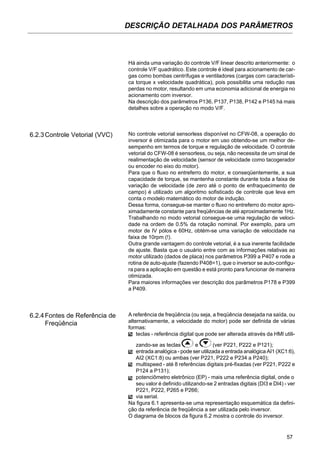
O multispeed é utilizado quando se deseja até 8 velocidades fixas
pré-programadas.
Permite o controle da velocidade de saída relacionando os valores
definidos pelos parâmetros P124...P131, confome a combinação
lógica das entradas digitais programadas para multispeed.
Ativação da função multispeed:
- fazer com que a fonte de referência seja dada pela função
multispeed, ou seja, fazer P221=6 para o modo local ou P222=6
para o modo remoto;
- programar uma ou mais entradas digitais para multispeed, con
forme tabela abaixo:
DI habilita Programação
DI2 P264 = 7
DI3 P265 = 7
DI4 P266 = 7
A referência de freqüência é definida pelo estado das entradas
digitais programadas para multispeed conforme mostrado na
tabela abaixo:
A função multispeed traz como vantagens a estabilidade das refe-
rências fixas pré-programadas, e a imunidade contra ruídos elétri-
cos (referências digitais e entradas digitais isoladas).
(1)
Esse parâmetro só pode ser alterado com o inversor desabilitado (motor parado).
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
P124(1)
P133...P134
Ref. 1 Multispeed [ 3.00Hz ]
0.01Hz (<100.0);
0.1Hz (>99.99)
P125(1)
P133...P134
Ref. 2 Multispeed [ 10.00Hz ]
0.01Hz (<100.0);
0.1Hz (>99.99)
P126(1)
P133...P134
Ref. 3 Multispeed [ 20.00Hz ]
0.01Hz (<100.0);
0.1Hz (>99.99)
P127(1)
P133...P134
Ref. 4 Multispeed [ 30.00Hz ]
0.01Hz (<100.0);
0.1Hz (>99.99)
P128(1)
P133...P134
Ref. 5 Multispeed [ 40.00Hz ]
0.01Hz (<100.0);
0.1Hz (>99.99)
P129(1)
P133...P134
Ref. 6 Multispeed [ 50.00Hz ]
0.01Hz (<100.0);
0.1Hz (>99.99)
P130(1)
P133...P134
Ref. 7 Multispeed [ 60.00Hz ]
0.01Hz (<100.0);
0.1Hz (>99.99)
P131(1)
P133...P134
Ref. 8 Multispeed [ 66.00Hz ]
0.01Hz (<100.0);
0.1Hz (>99.99)
DI2 DI3 DI4 Ref. de Freq.
Aberta Aberta Aberta P124
Aberta Aberta 0V P125
Aberta 0V Aberta P126
Aberta 0V 0V P127
0V Aberta Aberta P128
0V Aberta 0V P129
0V 0V Aberta P130
0V 0V 0V P131
8 velocidades
4 velocidades
2 velocidades
Figura 6.5 - Diagrama de tempo da função multispeed
Rampa de
aceleração
Tempo
0V
DI2
DI3
DI4
aberto
0V
aberto
0V
aberto
P124
P125
P126
P127
P128
P129
P130
P131Freqüência
de Saída](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-65-320.jpg)
![66
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
P133(1)
0.00...P134
Freqüência Mínima [ 3.00Hz ]
(Fmin
) 0.01Hz (<100.0);
0.1Hz (>99.99)
P134(1)
P133...300.0
Freqüência Máxima [ 66.00Hz ]
(Fmax
) 0.01Hz (<100.0);
0.1Hz (>99.99)
Define os valores mínimo e máximo da freqüência de saída (motor)
quando o inversor é habilitado.
É válido para qualquer tipo de referência.
O parâmetro P133 define uma zona morta na utilização das entra
das analógicas - ver parâmetros P234 ... P240.
P134 em conjunto com o ganho e offset da(s) entrada(s)
analógica(s) (P234, P236, P238 e P240) definem a escala e a
faixa de ajuste de velocidade via entrada(s) analógica(s). Para
maiores detalhes ver parâmetros P234 ... P240.
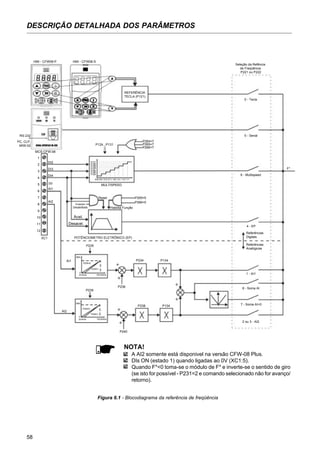
P136 0.0...30.0%
Boost de Torque [ 5.0% para
Manual 01.6-2.6-4.0-7.0A/
(Compensação IxR) 200-240V e
1.0-1.6-2.6-4.0A/
380-480V;
2.0% para
7.3-10-16A/
200-240V e
2.7-4.3-6.5-10A/
380-480V;
1.0% para
13-16A/380-480V ]
0.1%
Compensa a queda de tensão na resistência estatórica do motor.
Atua em baixas velocidades, aumentando a tensão de saída do
inversor para manter o torque constante, na operação V/F.
O ajuste ótimo é o menor valor de P136 que permite a partida do
motor satisfatoriamente. Valor maior que o necessário irá
incrementar demasiadamente a corrente do motor em baixas ve-
locidades, podendo forçar o inversor a uma condição de
sobrecorrente (E00 ou E05).
Este parâme-
tro só é visível no
modo escalar
(P202=0 ou 1)
Figura 6.6 - Curva V/F e detalhe do boost de torque manual (compensação IxR)
Tensão de Saída
(em % da tensão da entrada)
Tensão de Saída
(em % da tensão da entrada)
P142
P136xP142
0 P145
Freqüência
de Saída
P142
P136
0 P145
Freqüência
de Saída
(a) P202=0 (b) P202=1
P137 0.00...1.00%
Boost de Torque [ 0.00 ]
Automático -
(Compensação IxR
Automática)
Este parâme-
tro só é visível no
modo escalar
(P202=0 ou 1)
O boost de torque automático compensa a queda de tensão na
resistência estatórica em função da corrente ativa do motor.
Os critérios para o ajuste de P137 são os mesmos que os do
parâmetro P136.
(1)
Esse parâmetro só pode ser alterado com o inversor desabilitado (motor parado).](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-66-320.jpg)
![67
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
Figura 6.7 - Blocodiagrama da função boost de torque automático
Zona de
Compensação
Máxima
(P142)
Tensão de Saída
Freqüência
de Saída
Enfraquecimento
do Campo (P145)
4Hz
0
Figura 6.8 - Curva V/F com boost de torque automático
(IxR automático)
Referência
de Freqüênca (F*)
Corrente Ativa
de Saída (Ia
)
Filtro
IxR
Automático
P137
IxR
P136
P007
Tensão
Aplicada
ao Motor
P138 0.0...10.0%
Escorregamento [ 0.0 ]
Nominal 0.1%
Este parâme-
tro só é visível no
modo escalar
(P202=0 ou 1)
O parâmetro P138 é utilizado na função de compensação de
escorregamento do motor.
Esta função compensa a queda na rotação do motor devido à
aplicação de carga, característica essa inerente ao princípio de
funcionamento do motor de indução.
Essa queda de rotação é compensada com o aumento da fre-
qüência de saída (aplicada ao motor) em função do aumento da
corrente ativa do motor, conforme é mostrado no diagrama de
blocos e na curva V/F das figuras a seguir.
Compensação
de
Escorregamento
Corrente Ativa
de Saída (Ia
)
Referência
de Freqüênca (F*)
Freqüência de Entrada da
Rampa (Fe)
F
Filtro P138
Figura 6.9 - Blocodiagrama da função compensação de escorregamento](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-67-320.jpg)
![68
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
Figura 6.10 - Curva V/F com compensação de escorregamento
Tensão de Saída
(função da
carga no
motor)
Freqüência
de Saída
Para o ajuste do parâmetro P138 utilizar o seguinte procedimento:
- acionar o motor a vazio com aproximadamente metade da faixa de
velocidade de utilização;
- medir a velocidade do motor ou equipamento;
- aplicar carga nominal no equipamento;
- incrementar o parâmetro P138 até que a velocidade atinja o valor
a vazio.
P142(1)
0...100%
Tensão de Saída [ 100% ]
Máxima 1%
P145(1)
P133...P134
Freqüência de Início [ 60.00Hz ]
de Enfraquecimento 0.01Hz (<100.0)
de Campo 0.1Hz (>99.99)
(Freqüência Nominal)
Estes
parâme-tros só são
visíveis no modo
escalar (P202=0 ou
1)
Definem a curva V/F utilizada no controle escalar (P202=0 ou 1).
Permite a alteração das curvas V/F padrões definidas em P202 -
curva V/F ajustável.
O parâmetro P142 ajusta a máxima tensão de saída. O valor é
ajustado em percentual da tensão de alimentação do inversor.
O parâmetro P145 define a freqüência nominal do motor utilizado.
A curva V/F relaciona tensão e freqüência de saída do inversor
(aplicadas ao motor) e conseqüentemente, o fluxo de
magnetização do motor.
A curva V/F ajustável pode ser usada em aplicações especiais
nas quais os motores utilizados necessitam de tensão e/ou fre-
qüência nominal diferentes do padrão. Exemplos: motor de 220V/
400Hz e motor de 200V/60Hz.
O parâmetro P142 é bastante útil também em aplicações nas quais
a tensão nominal do motor é diferente da tensão de alimentação
do inversor. Exemplo: rede de 440V e motor de 380V.
Figura 6.11 - Curva V/F ajustável
Tensão de Saída
Freqüência
de SaídaP1450.1Hz
0
P142
(1)
Esse parâmetro só pode ser alterado com o inversor desabilitado (motor parado).](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-68-320.jpg)
![69
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
P151 325...410V
Nível de Atuação da (linha 200-240V)
Regulação da [ 380V ]
Tensão do 1V
Circuito Intermediário
564...820V
(linha 380-480V)
[ 780V ]
1V
A regulação da tensão do circuito intermediário (holding de rampa)
evita o bloqueio do inversor por erro relacionado a sobretensão
no circuito intermediário (E01), quando da desaceleração de cargas
com alta inércia ou com tempos de desaceleração pequenos.
Atua de forma a prolongar o tempo de desaceleração (conforme
a carga - inércia), de modo a evitar a atuação do E01.
E01 - Sobretensão
Limitação CI
Tensão CI
Ud (P004)
Tempo
Freqüência
de Saída
(Velocidade
do Motor)
Ud nominal
P151
Tempo
Figura 6.12 - Desaceleração com limitação (regulação) da
tensão do circuito intermediário
Consegue-se assim, um tempo de desaceleração otimizado
(mínimo) para a carga acionada.
Esta função é útil em aplicações de média inércia que exigem
rampas de desaceleração curtas.
Caso continue ocorrendo o bloqueio do inversor por sobretensão
(E01) durante a desaceleração, deve-se reduzir gradativamente
o valor de P151 ou aumentar o tempo da rampa de desaceleração
(P101 e/ou P103).
Caso a rede esteja permanentemente com sobretensão (Ud
>P151)
o inversor pode não desacelerar. Neste caso, reduza a tensão da
rede ou incremente P151.
Se, mesmo com esses ajustes, não for possível desacelerar o
motor no tempo necessário, resta as seguintes alternativas:
- utilizar frenagem reostática (ver item 8.10 Frenagem Reostática
para uma descrição mais detalhada);
- se estiver operando no modo escalar, aumentar o valor de P136;
- se estiver operando no modo vetorial, aumentar o valor de P178.
NOTA!
Quando utilizar a frenagem reostática programar P151 no va-
lor
máximo.
P156 0.2xPInom
...1.3xPInom
Corrente de [ 1.2xP401 ]
Sobrecarga do Motor 0.01A (<10.0A);
0.1A (>9.99A)
Utilizado para proteção de sobrecarga do motor (função Ixt - E05).
A corrente de sobrecarga do motor é o valor de corrente a partir
do qual o inversor entenderá que o motor está operando em
sobrecarga. Quanto maior a diferença entre a corrente do motor e
a corrente de sobrecarga, mais rápida será a atuação do E05.
Tensão do Circuito
Intermediário](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-69-320.jpg)
![70
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
Figura 6.13 - Função Ixt – detecção de sobrecarga
3,0
2,0
1,5
1,0
15 30 60 90
Tempo (seg.)
Corrente do motor (P003)
Corrente de sobrecarga
Visa evitar o tombamento (travamento) do motor durante sobre-
cargas. Se a carga no motor aumentar a sua corrente irá aumentar.
Se a corrente tentar ultrapassar o valor ajustado em P169, a rotação
do motor será reduzida seguindo a rampa de desaceleração até
que a corrente fique abaixo do valor ajustado em P169. Quando a
sobrecarga desaparecer a rotação voltará ao normal.
P169 0.2xPInom
...2.0xPInom
Corrente Máxima de [ 1.5xP295 ]
Saída 0.01A (<10.0A);
0.1A (>9.99A)
O parâmetro P156 deve ser ajustado num valor de 10% a 20%
acima da corrente nominal do motor utilizado (P401).
Sempre que P401 é alterado é feito um ajuste automático de P156.
Figura 6.14 – Atuação da limitação de corrente
Tempo
em regime
Tempo
Corrente do motor
desaceleração através rampa (P101/P103)
desacel.
através
rampa
acel.
através
rampa
durante
desaceleração
durante
aceleração
Aceleração
através
rampa
(P100/P102)
Velocidade
P169
A função de limitação de corrente é desabilitada programando-se
P169>1.5xP295.
P178 50.0...150.0%
Fluxo Nominal [ 100% ]
0.1% (<100%);
1% (>99.9%)Este parâme-
tro só é visível no
modo vetorial
(P202=2)
Define o fluxo no entreferro do motor no modo vetorial. É dado em
percentual (%) do fluxo nominal.
Em geral não é necessário modificar o valor de P178 do valor
default (100%). No entanto, em algumas situações específicas,
pode-se usar valores diferentes de 100% em P178. São elas:
- Para aumentar a capacidade de torque do inversor (P178>100%).
Exemplos:
1) para aumentar o torque de partida do motor de modo a permitir
partidas mais rápidas;
2) paraaumentarotorquedefrenagemdoinversordemodoapermitir
paradas mais rápidas, sem utilizar a frenagem reostática.
- Para reduzir o consumo de energia do inversor (P178<100%).](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-70-320.jpg)
![71
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
Define o modo de controle do inversor. O item 4.3 dá algumas
orientações com relação à escolha do tipo de controle.
P202(1)
0...2
Tipo de Controle [ 0 - V/F linear ]
-
Conforme apresentado na tabela acima, há 2 modos de controle
escalar:
- Controle V/F linear, no qual consegue-se manter o fluxo no
entreferro do motor aproximadamente constante desde em torno
de 3Hz até o ponto de enfraquecimento de campo (definido pelos
parâmetros P142 e P145). Consegue-se assim, nesta faixa de
variação de velocidade, uma capacidade de torque aproxima-
damente constante. É recomendado para aplicações em esteiras
transportadoras, extrusoras, etc.
- Controle V/F quadrático, no qual o fluxo no entreferro do motor é
proporcional à freqüência de saída até o ponto de enfraqueci-
mento de campo (também definido por P142 e P145). Dessa
forma, resulta uma capacidade de torque como uma função
quadrática da velocidade. A grande vantagem deste tipo de controle
é a capacidade de economia de energia no acionamento de cargas
de torque resistente variável, devido à redução das perdas do
motor (principalmente perdas no ferro deste, perdas magnéticas).
Exemplos de aplicações: bombas centrífugas, ventiladores,
acionamentos multimotores.
6.3.3 Parâmetros de Configuração - P200 ... P398
Tensão de Saída
P136=0
P142
0
P145
Freqüência
de Saída
Tensão de Saída
P136=0
P142
0
P145
Freqüência
de Saída
(a) V/F linear (b) V/F quadrático
Figura 6.15 - Modos de controle V/F (escalar)
(1)
Esse parâmetro só pode ser alterado com o inversor desabilitado (motor parado).
P202
0
1
2
Tipo de Controle
Controle V/F Linear (escalar)
Controle V/F Quadrática (escalar)
Controle Vetorial](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-71-320.jpg)
![72
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
Seleciona ou não a função especial Regulador PID.P203(1)
0...1
Seleção de Funções [ 0 - Nenhuma ]
Especiais -
P203
0
1
Função Especial
Nenhuma
Regulador PID
Para a função especial Regulador PID ver descrição detalhada
dos parâmetros relacionados (P520...P528).
Quando P203 é alterado para 1, P265 é alterado automaticamente
para 15 (DI3=manual/automático).
Reprograma todos os parâmetros para os valores do padrão de
fábrica, fazendo-se P204=5.
Os parâmetros P142 (tensão de saída máxima), P145 (freqüên-
cia nominal), P295 (corrente nominal), P308 (endereço do inver-
sor) e P399 a P407 (parâmetros do motor) não são alterados
quando da carga dos ajustes de fábrica através de P204=5.
P204(1)
0...5
Carrega Parâmetros [ 0 ]
com Padrão de -
Fábrica
Seleciona qual dos parâmetros de leitura listados abaixo será
mostrado no display, após a energização do inversor.
P205(1)
0...6
Seleção do [ 2 - P002 ]
Parâmetro de -
Leitura Indicado
P205
0
1
2
3
4, 5
6
Parâmetro de Leitura
P005 [Freqüência de Saída (Motor)]
P003 [Corrente de Saída (Motor)]
P002 (Valor Proporcional à Freqüência)
P007 [Tensão de Saída (Motor)]
Sem Função
P040 (Variável de Processo PID)
Quando ocorre um erro, exceto E14, E24 ou E41, o inversor po
derá gerar um reset automaticamente, após transcorrido o tempo
dado por P206.
Se P206 2 não ocorrerá o auto-reset.
Após ocorrido o auto-reset, se o mesmo erro voltar a ocorrer por
três vezes consecutivas, a função de auto-reset será inibida. Um
erro é considerado reincidente, se este mesmo erro voltar a ocorrer
até 30 segundos após ser executado o auto-reset. Portanto, se
um erro ocorrer quatro vezes consecutivas, este erro permanecerá
sendo indicado (e o inversor desabilitado) permanentemente.
P206 0...255s
Tempo de [ 0 ]
Auto-Reset 1s
≥
O controle vetorial permite um melhor desempenho em termos de
torque e regulação de velocidade. O controle vetorial do CFW-08
opera sem sensor de velocidade no motor (sensorless). Deve ser
utilizado quando for necessário:
- uma melhor dinâmica (acelerações e paradas rápidas);
- quando necessária uma maior precisão no controle de velocidade;
- operar com torques elevados em baixa rotação ( 5Hz).
Exemplos: acionamentos que exijam posicionamento como
movimentação de cargas, máquinas de empacotamento, bombas
dosadoras, etc.
Ocontrolevetorialnãopodeserutilizadoemaplicaçõesmultimotores.
A performance do controle vetorial utilizando-se freqüência de
chaveamento de 10kHz não é tão boa quanto com 5kHz ou 2.5kHz.
Não é possível utilizar o controle vetorial com freqüência de
chaveamento de 15kHz.
Para mais detalhes sobre o controle vetorial ver item 6.2.2.
≥
(1)
Esse parâmetro só pode ser alterado com o inversor desabilitado (motor parado).](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-72-320.jpg)
![73
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
Número de Pólos do Motor
II pólos
IV pólos
VI pólos
P208 para P002 indicar a
velocidade em rpm
60
30
20
Sempre que for passado para o modo vetorial (P202=2), o
parâmetro P208 é ajustado conforme o valor de P402 (velocidade
do motor), para indicar a velocidade em rpm.
P215(1)
0...2
Função Copy [ 0 - Sem Função ]
-
Este parâme-
tro somente está
disponível via
HMI-CFW08-S
A função copy é utilizada para transferir o conteúdo dos parâmetros
de um inversor para outro(s).
P215
0
1
2
Explicação
-
Transfere o conteúdo dos parâmetros atu-
ais do inversor para a memória não volátil
da HMI-CFW08-S (EEPROM).
Os parâmetros atuais do inversor
permanecem inalterados.
Transfere o conteúdo da memória não vo-
látil da HMI-CFW08-S (EEPROM) para os
parâmetros atuais do inversor.
Ação
Sem Função
Copy
(inversor → HMI)
Paste
(HMI → inversor)
(1)
Esse parâmetro só pode ser alterado com o inversor desabilitado (motor parado).
Procedimento a ser utilizado para copiar a parametrização do
inversor A para o inversor B:
1. Conectar a HMI-CFW08-S no inversor que se quer copiar os
parâmetros (Inversor A - inversor fonte).
2. Fazer P215=1 (copy) para transferir os parâmetros do Inversor
A
para a HMI-CFW08-S. Pressionar a tecla . Enquanto
estiver
sendo realizada a função copy o display mostra
P215 volta automaticamente para 0 (Inativa) quando a transferên-
cia estiver concluída.
3. Desligar a HMI-CFW08-S do inversor (A).
4. Conectar esta mesma HMI-CFW08-S no inversor para o qual
se deseja transferir os parâmetros (Inversor B - inversor
destino).
5. Fazer P215=2 (paste) para transferir o conteúdo da memória
não volátil da HMI (EEPROM - contendo os parâmetros
do inversor A)
para o Inversor B. Pressionar a tecla . Enquanto a
HMI-CFW08-S estiver realizando a função paste o display indi-
ca
uma abreviatura para paste. Quando P215
voltar para 0 a transferência dos parâmetros foi conclu-
Permite que o parâmetro de leitura P002 indique a velocidade do
motor em uma grandeza qualquer, por exemplo, rpm.
A indicação de P002 é igual ao valor da freqüência de saída (P005)
multiplicado pelo conteúdo de P208, ou seja, P002 = P208 x P005.
Se desejado, a conversão de Hz para rpm é feita em função do
número de pólos do motor utilizado:
P208 0.00...99.9
Fator de Escala [ 1.00 ]
da Referência 0.01 (<10.0)
0.1 (>9.99)](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-73-320.jpg)
![74
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
Parâmetros Parâmetros
EEPROMEEPROM
INVERSOR
B
INVERSOR
A
HMI→INV (paste)
P215 = 2
Pressionar
INV→HMI
(copy)
P215 = 1
Pressionar
HMI-CFW08-S
Figura 6.16 - Cópia da parametrização do inversor A para
o inversor B utilizando a função copy e HMI-CFW08-S
Enquanto a HMI estiver realizando a função copy (seja na leitura
ou escrita), não é possível operá-la.
NOTA!
A função copy só funciona quando os inversores forem do mesmo
modelo (tensão e corrente) e tiverem versões de software com-
patíveis. A versão de software é considerada compatível quando
os dígitos x e y (Vx.yz) forem iguais. Se forem diferentes, ocorrerá
E10 e os parâmetros não serão carregados no inversor destino.
P219(1)
0.00...25.00Hz
Ponto de Início da [ 6.00Hz ]
Redução da 0.01Hz
Freqüência de
Chaveamento
Define o ponto no qual há a comutação automática da freqüência
de chaveamento para 2.5kHz.
Isto melhora sensivelmente a medição da corrente de saída em
baixas freqüências e conseqüentemente, a performance do
inversor, principalmente em modo vetorial.
Recomenda-se que o valor de P219 seja ajustado em função da
freqüência de chaveamento escolhida conforme tabela abaixo:
P297 (Fsw
)
4 (5kHz)
6 (10kHz)
7 (15kHz)
P219 recomendado
6.00Hz
12.00Hz
18.00Hz
Em aplicações onde não for possível operar em 2.5kHz (por
questões de ruído acústico por exemplo) fazer P219=0.00.
(1)
Esse parâmetro só pode ser alterado com o inversor desabilitado (motor parado).
HMI-CFW08-S
Convém lembrar ainda:
- Se os inversores A e B acionarem motores diferentes
verificar os parâmetros do motor (P399 ...
P409) do inversor B.
- Para copiar o conteúdo dos parâmetros do Inversor A
para outro(s) inversor(es) repetir os passos 4 a
6 acima.](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-74-320.jpg)
![75
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
P220
0
1
2
3
4
5
6
Seleção Local/Remoto
Sempre situação local
Sempre situação remoto
Tecla da HMI-CFW08-P
Tecla da HMI-CFW08-P
DI2...DI4
Tecla da HMI-CFW08-S ou interface
serial
Tecla da HMI-CFW08-S ou interface
serial
Situação default (*)
-
-
Local
Remoto
-
Local
Remoto
Nota: (*) Quando o inversor é energizado (inicialização).
No ajuste padrão de fábrica, o inversor é inicializado na situação
local e a tecla da HMI-CFW08-P faz a seleção local/remoto.
Os inversores com tampa cega (sem HMI-CFW08-P) saem de
fábrica programados com P220=3.
Para maiores detalhes ver item 6.2.6.
P221(1)
0...8
Seleção da Referência [ 0 - Teclas ]
- Situação Local -
P222(1)
0...8
Seleção da Referência [ 1 - AI1 ]
- Situação Remoto -
Define a fonte da referência de freqüência nas situações local e
remoto.
P221/P222
0
1
2 ou 3
4
5
6
7
8
Fonte da Referência
Teclas e das HMIs (P121)
Entrada analógica AI1' (P234, P235 e P236)
Entrada analógica AI2' (P238, P239 e P240)
Potenciômetro eletrônico (EP)
Serial
Multispeed (P124...P131)
Soma Entradas Analógicas (AI1'+AI2') 0 (valores
negativos são zerados).
Soma Entradas Analógicas (AI1'+AI2')
≥
Para o padrão de fábrica, a referência local é via teclas e
da HMI e a referência remota é a entrada analógica AI1.
O valor ajustado pelas teclas e está contido no
parâmetro P121.
Ver funcionamento do potenciômetro eletrônico (EP) na figura 6.19.
Ao selecionar a opção 7 (EP), programar P265 e P266 em 5.
Ao selecionar a opção 8 (multispeed), programar P264 e/ou P265
e/ou P266 em 7.
Para maiores detalhes ver ítens 6.2.4 e 6.2.6.
(1)
Esse parâmetro só pode ser alterado com o inversor desabilitado (motor parado).
P220(1)
0...6
Seleção da Fonte [ 2 - Tecla
Local/Remoto HMI-CFW08-P ]
-
Define quem faz a seleção entre a situação local e a situação
remoto.](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-75-320.jpg)
![76
DESCRIÇÃO DETALHADA DOS PARÂMETROS
(1)
Esse parâmetro só pode ser alterado com o inversor desabilitado (motor parado).
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
P230(1)
0...2
Seleçãode Comandos [ 1 - Bornes ]
- Situação Remoto -
P229/P230
0
1
2
Origem dos Comandos
Teclas da HMI-CFW08-P
Bornes (XC1)
Teclas da HMI-CFW08-S
ou interface serial
O sentido de giro é o único comando de operação que depende
de outro parâmetro para funcionamento - P231.
Para maiores detalhes ver ítens 6.2.4, 6.2.5 e 6.2.6.
P231(1)
0...2
Seleçãodo Sentido [ 2 - Comandos ]
de Giro - Situação -
Local e Remoto
Define o sentido de giro
P231
0
1
2
Sentido de Giro
Sempre horário
Sempre anti-horário
Comandos, conforme
definido em P229 e P230
P234 0.00...9.99
Ganho da Entrada [ 1.00 ]
Analógica AI1 0.01
As entradas analógicas AI1 e AI2 definem a referência de
freqüência do inversor conforme a curva apresentada a seguir.
P134
P133
AI1/AI20
0 ..................... 100%
0 ........................ 10V (P235/P239=0)
0 ..................... 20mA (P235/P239=0)
4mA ................. 20mA (P235/P239=1)
Referência de Freqüência
Note que há uma zona morta no início da curva (freqüencia próxima
de zero), onde a referência de freqüência permanece no valor da
freqüência mínima (P133), mesmo com a variação do sinal de
entrada. Essa zona morta só é eliminada no caso de P133=0.00.
Figura 6.17 - Determinação da referência de freqüência a partir das
entradas analógicas AI1 e AI2
P229(1)
0...2
Seleção de Comandos [ 0 - Teclas ]
- Situação Local -
Definem a origem dos comandos de habilitação e desabilitação
do inversor, sentido de giro e JOG.](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-76-320.jpg)
![77
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
onde:
- x = 1, 2;
- AIx é dado em V ou mA, conforme o sinal utilizado (ver
parâmetros P235 e P239);
- GANHO é definido pelos parâmetros P234 e P238 para a AI1
e AI2 respectivamente;
- OFFSET é definido pelos parâmetros P236 e P240 para a AI1
e AI2 respectivamente.
Isto é representado esquematicamente na figura abaixo:
GANHO
P234, P238
AIx'
OFFSET
(P236,P240)
P235
P239
AIx
Figura 6.18 - Blocodiagrama das entradas analógicas AI1 e AI2
Seja por exemplo a seguinte situação: AI1 é entrada em tensão
(0-10V - P235=0), AI1=5V, P234=1.00 e P236=-70%. Logo:
Isto é, o motor irá girar no sentido contrário ao definido pelos
comandos (valor negativo) - se isto for possível (P231=2), com
uma referência em módulo igual 0.2 ou 20% da freqüência de saída
máxima (P134). Ou seja, se P134=66.00Hz então a referência de
freqüência é igual a 13,2Hz.
AI1' =
5
+
(-70) . 1 = -0.2 = -20%
10 100[ [
P235(1)
0...1
Sinal da Entrada [ 0 -
Analógica AI1 0...10V/0...20mA ]
Define o tipo do sinal das entradas analógicas, conforme tabela
abaixo:
P235/P239
0
1
Tipo/Excursão do Sinal
0...10V ou 0...20mA
4...20mA
Quando utilizar sinais em corrente alterar a posição das chaves
S1:1 e/ou S1:2 para a posição ON.
O valor interno AIx’ que define a referência de freqüência a ser
utilizada pelo inversor, é dado em percentual do fundo de escala e
éobtidoutilizando-seumadasseguintesequações(verP235eP239):
P235/P239
0
1
2
Sinal
0...10V
0...20mA
4...20mA
Equação
AIx'=
AIx
+
OFFSET
. GANHO
10 100
AIx'=
AIx
+
OFFSET
. GANHO
20 100
AIx'=
AIx-4
+
OFFSET
. GANHO
16 100
(
(
(
(
(
(
(1)
Esse parâmetro só pode ser alterado com o inversor desabilitado (motor parado).](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-77-320.jpg)
![78
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
(1)
Esse parâmetro só pode ser alterado com o inversor desabilitado (motor parado).
P236 -120...120%
Offset da Entrada [ 0.0 ]
Analógica AI1 0.1 (<100);
1 (>99.9)
P238 0.00...9.99
Ganho da Entrada [ 1.00 ]
Analógica AI2 0.01
P239(1)
0...1
Sinal da Entrada [ 0 -
Analógica AI2 0...10V/0...20mA]
Este parâme-
tro somente está
disponível na
versão CFW-08 Plus
Ver P234.
Ver P234.
Ver P235.
P251 0...9
Função da Saída [ 0 - fs
]
Analógica AO -
P252 0.00...9.99
Ganho da Saída [ 1.00 ]
Analógica AO 0.01
Essesparame-
tros somente estão
disponíveis na
versão CFW-08
Plus
P251 define a variável a ser indicada na saída analógica.
P251
0
1
2
3, 5 e 8
4
6
7
9
Função da AO
Freqüência de saída (Fs) - P005
Referência de freqüência ou freq. de entrada (Fe)
Corrente de saída - P003
Sem função
Torque - P009
Variável de processo - P040
Corrente ativa
Setpoint PID
NOTA!
-Aopção4somenteestádisponívelparaomododecontrolevetorial.
-Asopções6e9somenteestãodisponíveisapartirdaversãoV3.50.
Para valores padrão de fábrica, AO=10V quando a freqüência de
saída for igual à freqüência máxima (definida por P134), ou seja,
66Hz.
Escala das indicações nas saída analógicas (fundo de escala=10V):
P248 1 ... 200ms
Constante de tempo [ 200ms ]
para o filtro das AIs 1ms
Configura a constante de tempo do filtro das entradas analógicas
entre 0 (sem filtragem) e 200ms.
Com isto, a entrada analógica terá um tempo de resposta igual à
três constantes de tempo. Por exemplo, se a constante de tempo
for 200ms, e um degrau for aplicado à entrada analógica. Esta
estabilizará após passados 600ms.
P240 -120...120%
Offset da Entrada [ 0.0 ]
Analógica AI2 0.1 (<100);
1 (>99.9)
Este parâme-
tro somente está
disponível na
versão CFW-08 Plus
Este parâme-
tro somente está
disponível na
versão CFW-08 Plus
Ver P234.
P248 1 ... 200ms
Constante de tempo [ 200ms ]
para o filtro das AIs 1ms](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-78-320.jpg)
![79
DESCRIÇÃO DETALHADA DOS PARÂMETROS
(1)
Esse parâmetro só pode ser alterado com o inversor desabilitado (motor parado).
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
Variável
Freqüência (P251=0 ou 1)
Corrente (P251=2 ou 7)
Torque (P251=4)
Variável de Processo PID (P251=6)
Setpoint PID (P251=9)
Fundo de Escala
P134
1.5xInom
150%
P528
P528
P263(1)
0...14
Função da Entrada [ 0 - Sem Função
Digital DI1 ou Habilita Geral ]
-
P264(1)
0...14
Função da Entrada [ 0 - Sentido de Giro ]
Digital DI2 -
P265(1)
0...15
Função da Entrada [ 10 - Reset ]
Digital DI3 -
P266(1)
0...15
Função da Entrada [ 8 - Sem Função
Digital DI4 ou Gira/Pára ]
-
Verificar opções possíveis na tabela a seguir e detalhes sobre o
funcionamento das funções na figura 6.19.
DI Parâmetro DI1 DI2 DI3 DI4
Função (P263) (P264) (P265) (P266)
Habilita Geral
1...7 e
- 2 2
10...12
Gira/Pára 9 - 9 9
Sem Função ou Hab. Geral 0 - - -
Sem Função ou Gira/Pára - - 8 8
Avanço 8 - - -
Retorno - 8 - -
Avanço com 2a
Rampa 13 - - -
Retorno com 2a
Rampa - 13 - -
Liga 14 - - -
Desliga - 14 - -
Multispeed - 7 7 7
Multispeed com 2a
Rampa - - 14 -
Acelera EP - - 5 -
Desacelera EP - - - 5
Sentido de Giro - 0 0 0
Local/Remoto - 1 1 1
JOG - - 3 3
Sem Erro Externo - - 4 4
2a
Rampa - - 6 6
Reset - - 10 10
Desabilita Flying Start - - 13 13
Manual/Automático (PID) - - 15 -
Sem Função -
2...6 e
11 e 12
11, 12,
9...12 14 e 15
Funções ativadas com 0V na entrada digital.](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-79-320.jpg)
![80
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
NOTA!
1) Local/Remoto = aberta/0V na entrada digital respectivamen-
te.
2) P263=0 (sem função ou habilita geral) funciona da seguinte
forma:
- se a fonte dos comandos for os bornes, ou seja, se P229=1
para o modo local ou P230=1 para o modo remoto, a entrada
DI1 funciona como habilita geral;
- caso contrário, nenhuma função é atribuída à entrada DI1.
3) A programação P265 ou P266=8 (sem função ou gira/pára)
funciona de forma análoga, ou seja:
- se o inversor estiver operando no modo local e P229=1, a
entrada digital DI3/DI4 funciona como gira/pára;
- se o inversor estiver operando no modo remoto e P230=1,
a entrada digital DI3/DI4 funciona como gira/pára;
- caso contrário, nenhuma função estará associada à entrada
DI3/DI4.
4) A seleção P265=P266=5 (EP) necessita que se programe
P221 e/ou P222=4.
5) A seleção P264 e/ou P265 e/ou P266=7 (multispeed)
necessita que se programe P221 e/ou P222=6.
6) Sefordesejadotemposdeaceleraçãoedesaceleraçãodiferen-
tes para uma dada condição de operação (por exemplo, para
um jogo de freqüências ou para um sentido de giro) verificar a
possibilidade de utilizar as funções multispeed com 2a
rampa
e avanço/retorno com 2a
rampa.
7) Ver explicação sobre desabilita flying start em P310 e P311.
8) A opção manual/automático é explicada no item 6.3.5 -
Parâmetros das Funções Especiais (PID).](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-80-320.jpg)
![84
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
P277(1)
0...7
Função da Saída [ 7 - Sem Erro ]
a Relé RL1 -
P279(1)
0...7
Função da Saída [ 0 - Fs > Fx ]
a Relé RL2 -
As possíveis opções são listadas na tabela e figura abaixo.
O parâmetro
P279 somente está
disponível na
versão CFW-08 Plus
Saída/Parâmetro
Função
Fs > Fx
Fe > Fx
Fs = Fe
Is > Ix
Sem função
Run (inversor habilitado)
Sem erro
P277
(RL1)
0
1
2
3
4 e 6
5
7
P279
(RL2)
0
1
2
3
4 e 6
5
7
Figura 6.20 - Detalhes do funcionamento das funções das saídas digitais
Fs > Fx
Fs
Fx (P288)
Tempo
OFFRelé
ON
Is > Ix
Is
Ix (P290)
Tempo
OFFRelé
ON
Fs = Fe
Fs
Tempo
OFFRelé
ON
Fe
Fx (P288)
Tempo
OFFRelé
ON
Fe > Fx
Run
Motor Parado ou
Girando por Inércia
Tempo
OFFRelé
ON
Motor Girando
Sem Erro
Tempo
OFF
Relé
c/ EOX
s/ EOX
(1)
Esse parâmetro só pode ser alterado com o inversor desabilitado (motor parado).
ON](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-84-320.jpg)
![85
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
Quando o definido no nome da função for verdadeiro a saída digital
estará ativada, isto é, o relé tem a sua bobina energizada.
Quando programada a opção ‘Sem função’, a(s) saída(s) a relé
ficarão no estado de repouso, ou seja, com a bobina não energizada.
No caso do CFW-08 Plus que possui 2 saídas a relé (um contato
NA e outro NF), se for desejado um relé com contato reversor,
basta programar P277=P279.
Definições dos símbolos usados nas funções:
- Fs = P005 - Freqüência de Saída (Motor)
- Fe = Referência de Freqüência (freqüência de entrada da rampa)
- Fx = P288 - Freqüência Fx
- Is = P003 - Corrente de Saída (Motor)
- Ix = P290 - Corrente Ix
P288 0.00...300.0Hz
Freqüência Fx [ 3.00Hz ]
0.01Hz (<100.0Hz);
0.1Hz (>99.99Hz)
P288 0...1.5xP295
Corrente Ix [ 1.0xP295 ]
0.01A (<10.0A);
0.1A (>9.99A)
Usados nas funções das saídas a relé Fs>Fx, Fe>Fx e Is>Ix
(ver P277 e P279).
P295(1)
300...311
Corrente Nominal [ De acordo com a
do Inversor corrente nominal
(Inom
) do inversor ]
-
P295
300
301
302
303
304
305
306
307
308
309
310
311
Corrente Nominal
do Inversor (Inom
)
1.0A
1.6A
2.6A
2.7A
4.0A
4.3A
6.5A
7.0A
7.3A
10A
13A
16A
(1)
Esse parâmetro só pode ser alterado com o inversor desabilitado (motor parado).](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-85-320.jpg)
![86
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
Assim, P297=4 (5kHz) zimplica em uma freqüência audível no mo-
tor correspondente a 10kHz. Isto se deve ao método de modula-
ção PWM utilizado.
A redução da freqüência de chaveamento também colabora na
redução dos problemas de instabilidade e ressonâncias que ocorrem
em determinadas condições de aplicação, bem como da emissão
de energia eletromagnética pelo inversor.
Também, a redução da freqüência de chaveamento reduz as
correntes de fuga para a terra, podendo evitar a atuação indevida
da proteção de falta à terra (E00).
A opção 15kHz (P297=7) não é válida para o controle vetorial.
Utilizar correntes conforme tabela abaixo:
Modelo do Inversor
CFW080016B2024PSZ
CFW080026B2024PSZ
CFW080040B2024PSZ
CFW080070T2024PSZ
CFW080073B2024PSZ
CFW080100B2024PSZ
CFW080160T2024PSZ
CFW080010T3848PSZ
CFW080016T3848PSZ
CFW080026T3848PSZ
CFW080027T3848PSZ
CFW080040T3848PSZ
CFW080043T3848PSZ
CFW080065T3848PSZ
CFW080100T3848PSZ
CFW080130T3848PSZ
CFW080160T3848PSZ
10kHz
(P297=6)
1,6A
2,6A
3,4A
6,1A
7,3A
10A
14A
1,0A
1,6A
2,6A
2,7A
3,6A
3,9A
6,5A
8,4A
11A
12A
15kHz
(P297=7)
1,6A
2,6A
2,9A
5,1A
7,3A
10A
12A
1,0A
1,6A
2,3A
2,7A
3,2A
3,0A
6,3A
6,4A
9A
10A
P297(1)
4...7
Freqüência de [ 4 - 5kHz ]
Chaveamento -
Define a freqüência de chaveamento dos IGBTs do inversor.
P297
4
5
6
7
Freqüência de
Chaveamento (fsw
)
5kHz
2.5kHz
10kHz
15kHz
A escolha da freqüência de chaveamento resulta num compromisso
entre o ruído acústico no motor e as perdas nos IGBTs do inversor
(aquecimento). Freqüências de chaveamento altas implicam em
menorruídoacústiconomotorporémaumentamasperdasnosIGBTs,
elevando a temperatura nos componentes e reduzindo sua vida útil.
A freqüência da harmônica predominante no motor é o dobro da
freqüência de chaveamento do inversor programada em P297.
(1)
Esse parâmetro só pode ser alterado com o inversor desabilitado (motor parado).
2,5kHz
(P297=5)
1,6A
2,6A
4,0A
7,0A
7,3A
10A
16A
1,0A
1,6A
2,6A
2,7A
4,0A
4,3A
6,5A
10A
13A
16A
5kHz
(P297=4)
1,6A
2,6A
4,0A
7,0A
7,3A
10A
16A
1,0A
1,6A
2,6A
2,7A
4,0A
4,3A
6,5A
10A
13A
16A](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-86-320.jpg)
![87
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
Antes de iniciar a frenagem por corrente contínua existe um “tempo
morto” (motor gira livre), necessário para a desmagnetização do
motor. Este tempo é função da velocidade do motor (freqüência
de saída) em que ocorre a frenagem CC.
Durante a frenagem CC o display de leds indica
piscante.
Caso o inversor seja habilitado durante o processo de frenagem
esta será abortada e o inversor passará a operar normalmente.
A frenagem CC pode continuar atuando mesmo que o motor já
tenha parado. Cuidar com o dimensionamento térmico do motor
para frenagens cíclicas de curto período.
Em aplicações com motor menor que o nominal do inversor e
cujo torque de frenagem não for suficiente, consultar a fábrica
para uma otimização dos ajustes.
P300 0.0...15.0s
Duração da [ 0.0 ]
Frenagem CC 0.1s
P301 0.00...25.00Hz
Freqüência de Início [ 1.00Hz ]
da Frenagem CC 0.01Hz
P302 0.0...130%
Corrente Aplicada [ 0.0% -
na Frenagem CC P295 (Inom
) ]
0.1%
A frenagem CC permite a parada rápida do motor através da
aplicação de corrente contínua no mesmo.
A corrente aplicada na frenagem CC, que é proporcional ao torque
de frenagem, pode ser ajustada em P302. É ajustada em percentual
(%) da corrente nominal do inversor.
As figuras a seguir mostram o funcionamento da frenagem CC
nas duas condições possíveis: bloqueio por rampa e bloqueio geral.
P301
P300
TEMPO
MORTO
aberto
Tempo
DI - Gira/Pára
0V
Freqüência
de Saída
(Velocidade
do Motor)
INJEÇÃO DE CORRENTE
CONTÍNUA
Figura 6.21 - Atuação da frenagem CC no bloqueio por rampa
(desabilitação por rampa)
P300
aberto
Tempo
TEMPO MORTO
INJEÇÃO DE CORRENTE
CONTÍNUA
DI- Habilita Geral
Figura 6.22 - Atuação da frenagem CC no bloqueio geral
(desabilitação geral)
Freqüência
de Saída
(Velocidade
do Motor)
0V](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-87-320.jpg)
![88
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
P304 P133...P134
Freqüência [ 30.00Hz ]
Evitada 2 0.01Hz (<100.0Hz);
0.1Hz (99.99Hz)
P306 0.00...25.00Hz
Faixa Evitada [ 0.00 ]
0.01Hz
Figura 6.23 - Curva de atuação da função freqüências evitadas
A passagem pela faixa de velocidade evitada (2xP306) é feita
através da rampa de aceleração e desaceleração seleciona-
da.
A função não opera de forma correta se duas faixas de freqüência
rejeitadas se sobrepuserem.
P308(1)
1...30
Endereço Serial (Serial WEG)
1 ... 247
(Modbus-RTU)
[1]
1
Ajusta o endereço do inversor para comunicação serial.
Para a serial WEG o valor máximo é 30 e no Modbus-RTU é 247.
Ver item 8.18 e 8.19.
A interface serial é um acessório opcional do inversor. Ver itens
8.9, 8.10 e 8.13.
2 x P306
P303
P304
P303
P304 2 x P306
Referência
de Freqüência
Freqüência
de Saída
P303 P133...P134
Freqüência [ 20.00Hz ]
Evitada 1 0.01Hz (<100.0Hz);
0.1Hz (99.99Hz)
Esta função (freqüências evitadas ou skip frequencies) evita que
o motor opere permanentemente nos valores de freqüência de
saída (velocidade) nos quais, por exemplo, o sistema mecânico
entra em ressonância causando vibração ou ruídos exagerados.
A habilitação dessa função é feita com P306 0.00.≠
P309 (1)
Protocolo da Interface
Serial
0 ... 9
[ 0 – WEG ]
1
Ajusta o tipo de protocolo para a comunicação serial.
A interface serial pode ser configurada para dois protocolos distin-
tos: WEG e Modbus-RTU.
O protocolo de comunicação WEG descrito no item 8.21 e é sele-
cionado fazendo-se P309=0.
Já o protocolo Modbus-RTU descrito no item 8.22 tem nove
formatos predefinidos conforme a tabela abaixo.
P309
1
2
3
4
5
6
7
8
9
Taxa (bps)
9600
9600
9600
19200
19200
19200
38400
38400
38400
Paridade
-
Ímpar
Par
-
Ímpar
Par
-
Ímpar
Par
(1)
Esse parâmetro só pode ser alterado com o inversor desabilitado (motor parado).](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-88-320.jpg)
![89
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
P310(1)
0...3
Flying Start e [ 0 - Inativas ]
Ride-Through -
P311 0.1...10.0s
Rampa de Tensão [ 5.0s ]
0.1s
O parâmetro P310 seleciona a(s) função(ões) ativa(s):
O parâmetro P311 ajusta o tempo necessário para a retomada do
motor, tanto na função flying start quanto na ride-through. Em ou-
tras palavras, define o tempo para que a tensão de saída parta de
0V e atinja o valor da tensão nominal.
Funcionamento da função flying start:
- Permite a partida do motor com o eixo girando. Esta função só
atua durante a habilitação do inversor. Na partida, o inversor impõe
a referência de freqüência instantaneamente e faz uma rampa
de tensão, com tempo definido em P311.
- É possível partir o motor da forma convencional, mesmo que a
função flying start esteja selecionada (P310=1 ou 2). Para isto,
basta programar uma das entradas digitais (DI3 ou DI4) com o
valor 13 (desabilita flying start) e acioná-la (0V) durante a partida
do motor.
(1)
Esse parâmetro só pode ser alterado com o inversor desabilitado (motor parado).
P310
0
1
2
3
Flying Start
Inativa
Ativa
Ativa
Inativa
Ride-Through
Inativa
Inativa
Ativa
Ativa
Figura 6.24 - Atuação da função Ride-through
P311tfalta
<2s
tdesab.
>tmorto
Habilitado
Desabilitado
Tensão no Circuito
Intermediário
Nível de Subtensão
(E02)
Pulsos de Saída
Tensão de Saída
0V
Freqüência de Saída
(Velocidade do Motor)
0Hz
Detalhes da função Ride-through:
- Permite a recuperação do inversor, sem bloqueio por E02
(subtensão), quando ocorrer uma queda momentânea da rede
de alimentação. O inversor somente será bloqueado por E02
quando a queda da rede durar mais que 2 segundos.
- Quando a função Ride-through estiver habilitada (P310=2 ou 3)
e
houver uma queda na rede, fazendo com que a tensão do
circuito intermediário fique abaixo do nível de subtensão, os pulsos
de saída são desabilitados (motor gira livre) e o inversor aguarda
o retorno da rede por até 2s. Se a rede voltar ao estado normal
antes desse tempo, o inversor volta a habilitar os pulsos PWM
impondo a referência de freqüência instantaneamente e fazendo
uma rampa de tensão com o tempo definido por P311.
- Antesdeiniciararampadetensãoexisteumtempomortonecessário
para desmagnetização do motor. Este tempo é proporcional à
freqüência de saída.](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-89-320.jpg)
![90
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
P313
Ação do Watchdog
da Serial
0 ... 3
[ 2 ]
1
Determina o tipo de ação realizada pelo watchdog.
Caso o inversor não receba nenhum telegrama válido no intervalo
programado em P314, esta ação é realizada e o erro E29 é
indicado.
Os tipos de ação são:
- P313=0 : desabilita o inversor via rampa de desaceleração;
- P313=1 : aciona o comando desabilita geral do inversor;
- P313=2 : somente indica E29;
- P313=3 : muda a referência de comandos para modo local.
Caso a comunicação se restabeleça o inversor para de indicar
E29 e permanece com seu estado inalterado.
P314
Tempo de atuação
do Watchdog da
Serial
0.0 ... 99.9
[ 0.0 – Função
Desabilitada]
0
Intervalo para atuação do Watchdog da Serial. Se o valor de P314
for 0 a função Watchdog da Serial é desabilitada. Caso contrário,
o conversor tomará a ação programada em P313, se o inversor
não receber um telegrama válido durante este intervalo.](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-90-320.jpg)
![91
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
P401 0.3xPInom
...1.3xPInom
Corrente Nominal [ De acordo
Motor com o modelo
do inversor ]
0.01A (<10.0A);
0.1A (>9.99A)
Corrente nominal do motor que consta na placa de identificação
deste. Trata-se do valor eficaz da corrente de linha nominal do motor.
Ajustar de acordo com os dados de placa do motor e a ligação
dos fios na caixa de ligação deste.
Este parâmetro é utilizado no controle escalar [funções compensação
de escorregamento e boost de torque automático (IxR automático)]
e no controle vetorial.
P402 0...9999rpm
Velocidade Nominal [ De acordo
Motor com o modelo
do inversor ]
1rpm
Ajustar de acordo com os dados de placa do motor.
É utilizado somente no controle vetorial.
Este parâme-
tro só é visível no
modo vetorial
(P202=2)
P403(1)
0.00...P134
Freqüência Nominal [ 60.00Hz ]
Motor 0.01Hz (<100.0Hz);
0.1Hz (>99.99Hz)
Este parâme-
tro só é visível no
modo vetorial
(P202=2)
Ajustar de acordo com os dados de placa do motor.
É utilizado somente no controle vetorial.
6.3.4 Parâmetros do Motor - P399 ... P499
P399(1)
50.0...99.9%
Rendimento Nominal [ De acordo
Motor com o modelo
do inversor ]
0.1%
Este parâme-
tro só é visível no
modo vetorial
(P202=2)
Ajustar de acordo os dados de placa do motor.
Se este valor não estiver disponível:
- Se for conhecido o fator de potência nominal do motor
(cos =P407), obter o rendimento a partir da seguinte equação:
onde P é a potência do motor em watts (W), V é a tensão de
linha nominal do motor em volts (V) - P400, e I é a corrente
nominal do motor em ampères (A) - P401. Para converter
de CV ou HP em W multiplicar por 750 (ex:
1CV=750W).
- Para uma aproximação, usar os valores da tabela da item 9.3.
É utilizado somente no controle vetorial.
∅
P399 = ηnom =
P
1.73 . V . I . cos∅
P400(1)
0...600V
Tensão Nominal [ 220V para os
do Motor modelos 200-240V;
380V para os
modelos 380-480V ]
1VEste parâme-
tro só é visível no
modo vetorial
(P202=2)
Tensão nominal do motor que consta na placa de identificação des-
te. Trata-se do valor eficaz da tensão de linha nominal do motor.
Ajustar de acordo com os dados de placa do motor e a ligação
dos fios na caixa de ligação deste.
É utilizado somente no controle vetorial.
(1)
Esse parâmetro só pode ser alterado com o inversor desabilitado (motor parado).](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-91-320.jpg)
![92
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
P407(1)
0.50...0.99
Fator de Potência [ De acordo
Nominal do Motor com o modelo
do inversor ]
0.01
Ajustar de acordo com os dados de placa do motor.
Se este valor não estiver disponível:
- Se for conhecido o rendimento nominal do motor (ηnom=P399),
obter o fator de potência a partir da seguinte equação:
P407 = cos =
P
1.73 . V . I . ηnom
∅
onde P é a potência do motor em watts (W), V é a tensão de
linha nominal do motor em volts (V) - P400, e I é a corrente
nominal do motor em ampères (A) - P401. Para converter
de CV ou HP em W multiplicar por 750 (ex:
1CV=750W).
- Para uma aproximação, usar os valores da tabela do item 9.3.
Este parâmetro é utilizado no controle escalar [funções compensa-
ção de escorregamento e boost de torque automático (IxR
automático)] e no controle vetorial.
Este parâme-
tro só é visível no
modo vetorial
(P202=2)
Através deste parâmetro é possível entrar na rotina de auto-ajuste
onde a resistência estatórica do motor em uso é estimada
automaticamente pelo inversor.
A rotina de auto-ajuste é executada com motor parado.
Fazendo P408=1 inicia-se a rotina de auto-ajuste.
Durante a execução do auto-ajuste o display indica
piscante.
Se for desejado interromper o auto-ajuste pressionar a tecla
Se o valor estimado da resistência estatórica do motor for muito
grande para o inversor em uso (exemplos: motor não conectado
ou motor muito pequeno para o inversor) o inversor indica E14. Só
é possível sair dessa condição desligando a alimentação do inver-
sor.
Este parâme-
tro só é visível no
modo vetorial
(P202=2)
Ajustar de acordo com os dados de placa do motor, conforme
tabela a seguir.
P404
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
CV
0.16
0.25
0.33
0.5
0.75
1
1.5
2
3
4
5
5.5
6
7.5
10
12.5
HP
0.16
0.25
0.33
0.5
0.75
1
1.5
2
3
4
5
5.5
6
7.5
10
12.5
kW
0.12
0.18
0.25
0.37
0.55
0.75
1.1
1.5
2.2
3.0
3.7
4.0
4.5
5.5
7.5
9.2
Potência Nominal do Motor
É utilizado somente no controle vetorial.
(1)
Esse parâmetro só pode ser alterado com o inversor desabilitado (motor parado).
P408(1)
0...1
Auto-Ajuste? [ 0 ]
-
P404(1)
0...15
Potência Nominal [ De acordo
Motor com o modelo
do inversor ]
-](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-92-320.jpg)
![93
DESCRIÇÃO DETALHADA DOS PARÂMETROS
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
P409 0.00...9.99
Resistência do [ De acordo
Estator com o modelo
do inversor ]
0.01
Este parâme-
tro só é visível no
modo vetorial
(P202=2)
Valor estimado pelo auto-ajuste.
A tabela do item 9.3 apresenta o valor da resistência
estatórica para motores standard.
Pode-se também entrar com o valor da resistência estatórica
diretamente em P409, se esse valor for conhecido.
NOTA!
P409 deve conter o valor equivalente da resistência estatórica
de uma fase, supondo-se que o motor esteja conectado em
estrela (Y).
NOTA!
Se o valor de P409 for muito alto poderá ocorrer o bloqueio do
inversor por sobrecorrente (E00).](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-93-320.jpg)

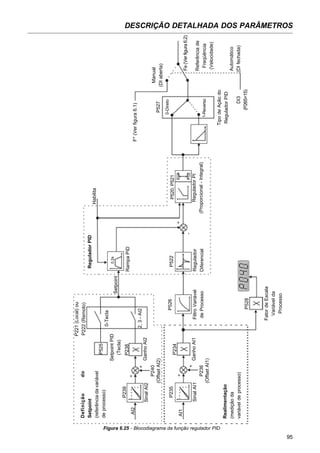


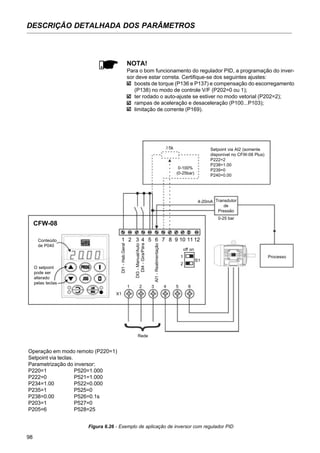
![99
USO DA HMI
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
P520 0.000...7.999
Ganho Proporcional [ 1.000 ]
PID 0.001
P521 0.000...9.999
Ganho Integral [ 1.000 ]
PID 0.001
P522 0.000...9.999
Ganho Diferencial [ 1.000 ]
PID 0.001
O ganho integral pode ser definido como sendo o tempo necessário
para que a saída do regulador PI varie de 0 até P134, o qual é
dado, em segundos, pela equação abaixo:
t =
16
P521.P525
nas seguintes condições:
- P040=P520=0;
- DI3 na posição automático.
P525 0.00...100.0%
Setpoint [ 0.00 ]
(Via Teclas) do 0.01%
Regulador PID
Fornece o setpoint (referência) do processo via teclas e
para o regulador PID desde que P221=0 (local) ou P222=0
(remoto) e esteja em modo automático. Caso esteja em modo
manual a referência por teclas é fornecida por P121.
Se P120=1 (backup ativo), o valor de P525 é mantido no último
valor ajustado (backup) mesmo desabilitando ou desenergizando
o inversor.
P526 0.01...10.00s
Filtro da Variável [ 0.10s ]
de Processo 0.01
Ajusta a constante de tempo do filtro da variável de processo.
É útil para se filtrar ruídos na entrada analógica AI1
(realimentação da variável de processo).
P527 0...1
Tipo de Ação do [ 0 ]
Regulador PID -
Define o tipo de ação de controle do PID.
P527
0
1
Tipo de Ação
Direto
Reverso
Selecione de acordo com a tabela abaixo:
Para isto a
velocidade do
motor deve
Aumentar
Aumentar
Necessidade da
variável de
processo
Aumentar
Diminuir
P527 a ser
utilizado
0 (Direto)
1 (Reverso)
P528 0.00...99.9
Fator de Escala da [ 1.00 ]
Variável de Processo 0.01(<10);
0.1 (>9.99)
Define a escala da variável de processo. Faz a conversão entre
valor percentual (utilizado internamente pelo inversor) e a unidade
da variável de processo.
P528 define como será mostrada a variável de processo em P040:
P040=valor % x P528.
Ajustar P528 em:
P528 =
fundo de escala do sensor utilizado (FM)
P234](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-99-320.jpg)

![SOLUÇÃO E PREVENÇÃO DE FALHAS
101
Obs.:
(1) No caso de atuação do erro E04 por sobretemperatura no inversor é
necessário esperar este esfriar um pouco antes de resetá-lo.
Nos modelos 10A/200-240 e 10A/380-480V equipados com Filtro
Supressor de RFI-Classe A interno, o E04 pode ser ocasionado
pela temperatura muito alta do ar interno. Verificar o ventilador inter-
no existente nestes modelos.
ERRO RESET (1)
CAUSAS MAIS PROVÁVEIS
E04 Power-on Temperatura ambiente alta (>40o
C) e/ou corrente de saída
Sobretemperatura Manual (tecla ) elevada.
no dissipador Auto-reset Ventilador bloqueado ou defeituoso.
de potência, no DI
ar interno do
inversor
E05 Ajuste de P156 muito baixo para o motor utilizado.
Sobrecarga na Carga no eixo muito alta.
saída, função
IxT
E06 Fiação nas entradas DI3 e/ou DI4 aberta [(não conectada a
Erro externo GND (pino 5 do conector de controle XC1)].
(aberturadaentrada
digital programada
parasem erroexterno)
E10 Power-on Mau contato no cabo da HMI-CFW08-S.
Erro da função Manual (tecla ) Ruído elétrico na istalação (interferência eletromagnética).
copy Auto-reset
DI
E14 Power-on Falta de motor conectado à saída do inversor.
Erro na rotina de Ligação incorreta do motor (tensão errada, falta uma
auto-ajuste fase).
O motor utilizado é muito pequeno para o inversor
(P401<0,3 x P295). Utilize controle escalar.
O valor de P409 (resistência estatórica) é muito grande
para o inversor utilizado.
Neste caso para resetar o erro é preciso reduzir
manualmente o valor de P409, pressionar a tecla
e então resetar o inverssor (tecla ou via DI).
E24 Desaparece automaticamente Tentativa de ajuste de um parâmetro incompatível com
Erro de quando forem alterados os os demais. Ver tabela 5.1.
Programação parâmetros incompatíveis
E31 Desaparece automaticamente Mau contato no cabo da HMI.
Falha na conexão quando a HMI voltar a Ruído elétrico na instalação (interferência
da IHM estabelecer comunicação eletromagnética).
normal com o inversor
E41 Consultar a Assistência Defeito no circuito de potência do inversor.
Erro de Técnica da Weg
auto-diagnose Automação (ítem 7.3)](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-101-320.jpg)
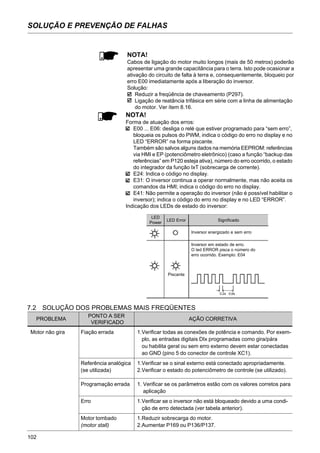
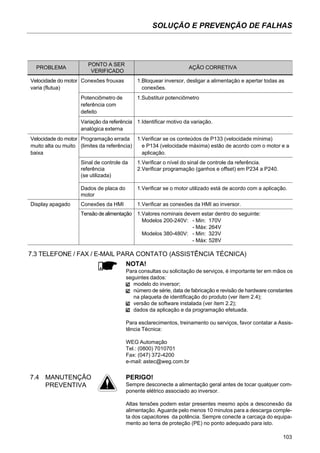
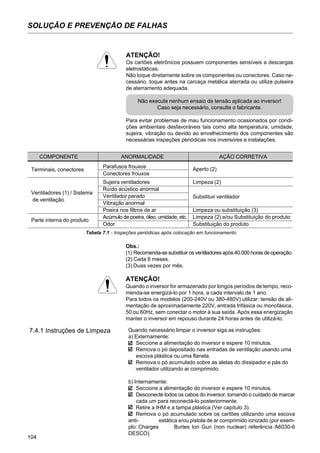



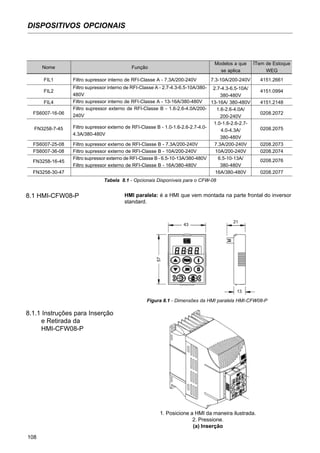
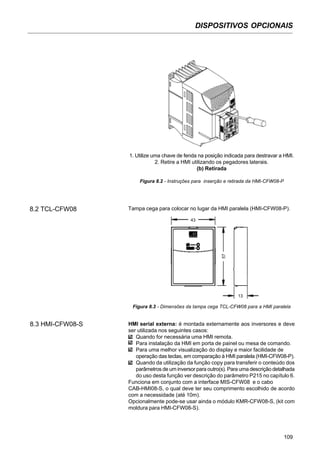
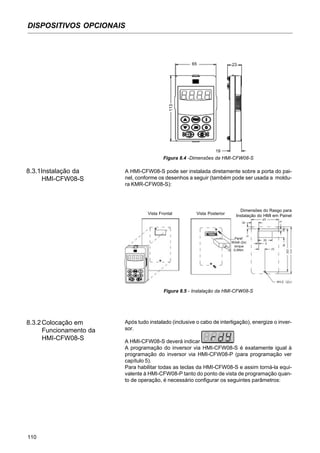
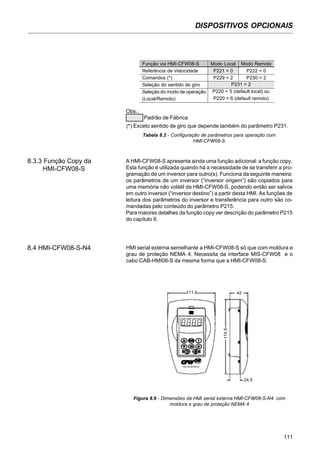
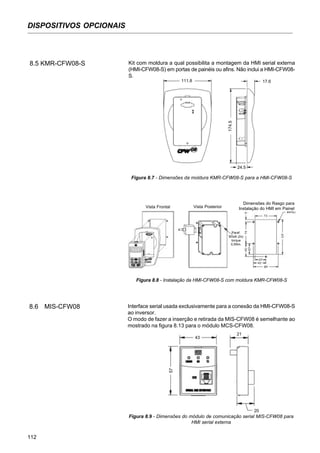
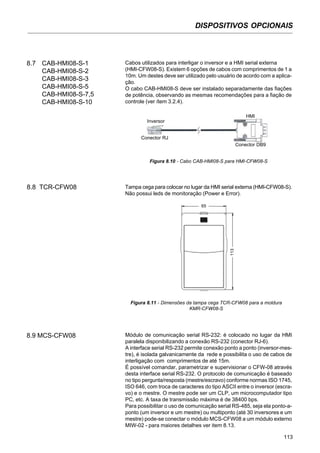
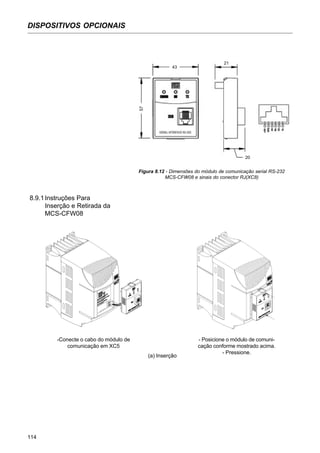
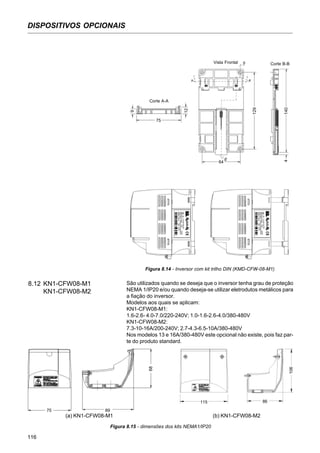
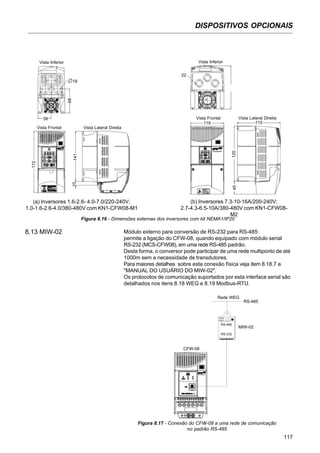

![DISPOSITIVOS OPCIONAIS
119
8.15.1 Critérios de Uso De uma forma geral, os inversores da série CFW-08 podem ser ligados
diretamente à rede elétrica, sem reatância de rede. No entanto, verificar
o seguinte:
Para evitar danos ao inversor e garantir a vida útil esperada deve-se
ter uma impedância mínima de rede que proporcione uma queda de
tensão conforme a tabela 8.3, em função da carga do inversor. Se
a impedância de rede (devido aos transformadores e
cablagem) for inferior aos valores listados nessa tabela, re-
comenda-se utilizar uma reatância de rede.
Quando da utilização de reatância de rede é recomendável que a
que da de tensão percentual, incluindo a queda em impedância
de trans- formadores e cabos, fique em torno de 2 a 4%. Essa
prática resulta num bom compromisso entre a queda de ten-
são no motor, melhoria do fator de potência e redução da
distorção harmônica.
Usar reatância de rede sempre que houver capacitores para corre-
ção do fator de potência instalados na mesma rede e próximos
ao inversor.
A conexão da reatância de rede na entrada do inversor é apresenta-
da na figura 8.19.
Para o cálculo do valor da reatância de rede necessária para obter a
queda de tensão percentual desejada utilizar:
onde:
V - queda de rede desejada, em percentual (%);
Ve
-tensãodefasenaentradadoinversor(tensãoderede),dadaemvolts(V);
IS, nom
- corrente nominal de saída do inversor.
Essas correntes harmônicas circulando pelas impedâncias da rede de
alimentação provocam quedas de tensão harmônicas, distorcendo a ten-
são de alimentação do próprio inversor ou de outros consumidores. Como
efeito dessas distorções harmônicas de corrente e tensão podemos ter
o aumento de perdas elétricas nas instalações com sobreaquecimento
dos seus componentes (cabos, transformadores, bancos de capacitores,
motores, etc.) bem como um baixo fator de potência.
As harmônicas da corrente de entrada são dependentes dos valores
das impedâncias presentes no circuito de entrada.
A adição de uma reatância de rede reduz o conteúdo harmônico da
corrente proporcionando as seguintes vantagens:
aumento do fator de potência na entrada do inversor;
redução da corrente eficaz de entrada;
diminuição da distorção da tensão na rede de alimentação;
aumento da vida útil dos capacitores do circuito intermediário.
L = 26,5 . V .
Ve [µH]
IS, nom
∇
∇](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-119-320.jpg)
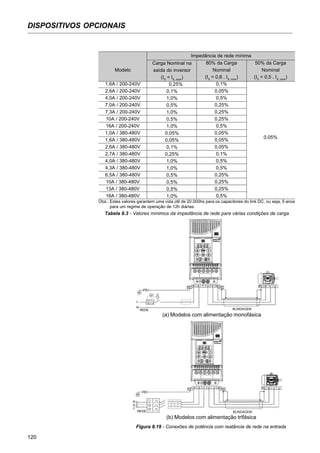
![DISPOSITIVOS OPCIONAIS
121
Como critério alternativo, recomenda-se adicionar uma reatância de
rede sempre que o transformador que alimenta o inversor possuir
uma potência nominal maior que o indicado a seguir:
Modelo do Inversor
1,6A e 2,6A/200-240V
4A/200-240V
7A e 7,3A/200-240V
10A/200-240V
16A/200-240V
1A; 1,6A e 2,6A/380-480V
4,0 e 4,3A/380-480V
2,7A/380-480V
6,5A; 10A e 13A/380-480V
16A/380-480V
Potência do Transformador [kVA]
30 x potência aparente nominal do inversor [kVA]
6 x potência aparente nominal do inversor [kVA]
10 x potência aparente nominal do inversor [kVA]
7,5 x potência aparente nominal do inversor [kVA]
4 x potência aparente nominal do inversor [kVA]
30 x potência aparente nominal do inversor [kVA]
6 x potência aparente nominal do inversor [kVA]
15 x potência aparente nominal do inversor [kVA]
7,5 x potência aparente nominal do inversor [kVA]
4 x potência aparente nominal do inversor [kVA]
Obs.: O valor da potência aparente nominal pode ser obtido no item 9.1 deste manual.
Tabela 8.4 - Critério alternativo para uso de reatância de rede -
Valores máximos da potência do transformador
A utilização de uma reatância trifásica de carga, com queda de aproxi-
madamente 2%, adiciona uma indutância na saída do inversor para o
motor. Isto diminuirá o dV/dt (taxa de variação de tensão) dos pulsos
gerados na saída do inversor, e com isto os picos de sobretensão no
motor e a corrente de fuga que irão aparecer com distâncias grandes
entre o inversor e o motor (em função do efeito “linha de transmissão”)
serão praticamente eliminados.
Nos motores WEG até 460V não há necessidade do uso de uma
reatância de carga, uma vez que o isolamento do fio do motor suporta a
operação com o CFW-08.
Nas distâncias entre o inversor e o motor a partir de 100m a capacitância
dos cabos para o terra aumenta podendo atuar a proteção de
sobrecorrente (E00). Neste caso é recomendado o uso de reatância de
carga.
8.16 REATÂNCIA DE CARGA
Figura 8.20 - Conexão da reatância de carga
REDE
SECCIONADORA
R
S
T
PE PER S T U V W UVW
REATÂNCIA
DE CARGA
BLINDAGEM
PE
PE](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-121-320.jpg)
![122
DISPOSITIVOS OPCIONAIS
8.17 FRENAGEM
REOSTÁTICA
A frenagem reostática é utilizada nos casos em que se deseja tempos
curtos de desaceleração ou nos casos de cargas com elevada inércia.
Para o correto dimensionamento do resistor de frenagem deve-se levar
em conta os dados da aplicação como: tempo de desaceleração, inér-
cia da carga, freqüência da repetição da frenagem, etc.
Em qualquer caso, os valores de corrente eficaz e corrente de pico
máximas devem ser respeitados.
A corrente de pico máxima define o valor ôhmico mínimo permitido do
resistor. Consultar a Tabela 8.5.
Os níveis de tensão do link CC para a atuação da frenagem reostática
são os seguintes:
Inversores alimentados em 200...240V: 375Vcc
Inversores alimentados em 380...480V: 750Vcc
8.17.1 Dimensionamento O conjugado de frenagem que pode ser conseguido através da aplica-
ção de inversores de freqüência, sem usar o módulo de frenagem
reostática, varia de 10 a 35% do conjugado nominal do motor.
Durante a desaceleração, a energia cinética da carga é regenerada ao
link CC (circuito intermediário). Esta energia carrega os capacitores ele-
vando a tensão. Caso não seja dissipada poderá provocar sobretensão
(E01), desabilitando o inversor.
Para se obter conjugados frenantes maiores, utiliza-se a frenagem
reostática. Através da frenagem reostática a energia regenerada em
excesso é dissipada em um resistor montado externamente ao inversor.
A potência do resistor de frenagem é função do tempo de desaceleração,
da inércia da carga e do conjugado resistente. Para a maioria das apli-
cações pode-se utilizar um resistor com o valor ôhmico indicado na ta-
bela a seguir e a potência como sendo de 20% do valor do motor acio-
nado. Utilizar resistores do tipo FITA ou FIO em suporte cerâmico com
tensão de isolamento adequada e que suportem potências instantâne-
as elevadas em relação à potência nominal. Para aplicações críticas,
com tempos muito curtos de frenagem, cargas de elevada inércia (ex:
centrífugas) ou ciclos repetitivos de curta duração, consultar a fábrica
para dimensionamento do resistor.
Modelo do Inversor
1,6A / 220-240V
2,6A / 220-240V
4,0A / 220-240V
7,0A / 220-240V
7,3A / 220-240V
10,0A / 220-240V
16,0A / 220-240V
1,0A / 380-480V
1,6A / 380-480V
2,6A / 380-480V
2,7A / 380-480V
4,0A / 380-480V
4,3A / 380-480V
6,5A / 380-480V
10,0A / 380-480V
13,0A / 380-480V
16,0A / 380-480V
Corrente de
Frenagem Máxima [A]
10
15
20
6
6
8
16
24
24
Corrente Eficaz
de Frenagem [A] (*1)
Frenagem não disponível
Frenagem não disponível
Frenagem não disponível
Frenagem não disponível
5
7
10
Frenagem não disponível
Frenagem não disponível
Frenagem não disponível
3,5
Frenagem não disponível
3,5
4
10
14
14
Resistor
Recomendado [Ω]
39
27
22
127
127
100
47
33
33
Tabela 8.5 - Resistores de frenagem recomendados
Fiação
Recomendada [mm2
]
-
-
-
-
2,5
2,5
2,5
-
-
-
1,5
-
1,5
2,5
2,5
2,5
2,5](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-122-320.jpg)
![DISPOSITIVOS OPCIONAIS
123
(*1) A corrente eficaz pode ser calculada através de:
Ieficaz = Imax
.
tbr
[min]
5
onde tbr
corresponde à soma dos tempos de atuação da frenagem du-
rante o mais severo ciclo de 5 minutos.
8.17.2 Instalação Conectar o resistor de frenagem entre os bornes de potência +UD e BR
(Ver ítem 3.2.2).
Utilizar cabo trançado para conexão. Separar estes cabos da fiação
de sinal e controle. Dimensionar os cabos de acordo com a aplicação
respeitando as correntes máxima e eficaz.
Se o resistor de frenagem for montado internamente ao painel do
inversor, considerar o calor provocado pelo mesmo no
dimensionamento da ventilação do painel.
PERIGO!
O circuito interno de frenagem do inversor e o resistor podem sofrer
danos se este último não for devidamente dimensionado e / ou se a
tensão de rede exceder o máximo permitido. Para evitar a destruição
do resistor ou risco de fogo, o único método garantido é o da inclusão
de um relé térmico em série com o resistor e / ou um termostato em
contato com o corpo do mesmo, ligados de modo a desconectar a rede
de alimentação de entrada do inversor no caso de sobrecarga, como
mostrado a seguir:
Figura 8.21 - Conexão do resistor de frenagem
(só para os modelos 7.3-10-16A/200-240V e 2.7-4.3-6.5-10-13-16/380-480V)
MOTOR
REDE DE
ALIMENTAÇÃO
CONTATOR
ALIMENTAÇÃO
DE COMANDO
RELÉ
TÉRMICO
TERMOSTATO
RESISTOR DE
FRENAGEM
U
V
W
R
S
T
BR +UD](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-123-320.jpg)

![DISPOSITIVOS OPCIONAIS
125
8.18.2.1 RS-485 Permite interligar até 30 inversores em um mestre (PC, CLP, etc.), atri-
buindo a cada inversor um endereço (1 a 30) ajustado em cada um
deles. Além desses 30 endereços, mais dois endereços são fornecidos
para executar tarefas especiais:
Endereço 0: qualquer inversor da rede é consultado, indepen-
dentemente de seu endereço. Deve-se ter apenas um inversor
ligado a rede (ponto-a-ponto) para que não ocorram curto-circuitos
nas linhas de interface.
8.18.2 Descrição das Interfaces O meio físico de ligação entre os inversores e o mestre da rede segue
um dos padrões:
a. RS-232 (ponto-a-ponto até 10m);
b. RS-485 (multiponto, isolamento galvânico, até 1000m);
ENDEREÇO
(P308)
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
ASCII
CHAR DEC HEX
@ 64 40
A 65 41
B 66 42
C 67 43
D 68 44
E 69 45
F 70 46
G 71 47
H 72 48
I 73 49
J 74 4A
K 75 4B
L 76 4C
M 77 4D
N 78 4E
O 79 4F
P 80 50
Q 81 51
R 82 52
S 83 53
T 84 54
U 85 55
V 86 56
W 87 54
X 88 58
Y 89 59
Z 90 5A
] 91 5B
92 5C
[ 93 5D
^ 94 5E
_ 95 5F
Endereço 31: um comando pode ser transmitido simultaneamente
para todos os inversores da rede, sem reconhecimento de aceita-
ção.
Lista de endereços e caracteres ASCII correspondentes](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-125-320.jpg)

![DISPOSITIVOS OPCIONAIS
127
8.18.3.2 Resolução dos
Parâmetros/
Variáveis
1 start bit;
8 bits de informação [codificam caracteres de texto e caracteres de
transmissão, tirados do código de 7 bits, conforme ISO 646 e
complementadas para paridade par (oitavo bit)];
1 stop bit.
Após o start bit, segue o bit menos significativo:
8.18.3.3 Formato dos
Caracteres
TELEGRAMA DE LEITURA: para consulta do conteúdo das
variáveis dos inversores;
TELEGRAMA DE ESCRITA: para alterar o conteúdo das
variáveis ou enviar comandos para os inversores.
Obs.:
Não é possível uma transmissão entre dois inversores.
O mestre tem o controle do acesso ao barramento.
8.18.3.4.1 Telegrama de leitura Este telegrama permite que o mestre receba do inversor o conteúdo
correspondente ao código da solicitação. No telegrama de resposta o
inversor transmite os dados solicitados pelo mestre e este termina a
transmissão com EOT.
EOT ADR ENQ
CÓDIGO
1) Mestre:
START B1 B2 B3 B4 B5 B6 B7 B8 STOP
Start
bit
Stop
bit
8 bits de informação
8.18.3.4 Protocolo O protocolo de transmissão segue a norma ISO 1745 para transmissão
de dados em código.
São usadas somente seqüências de caracteres de texto sem cabeça-
lho. A monitoração dos erros é feita através de transmissão relaciona-
da à paridade dos caracteres individuais de 7 bits, conforme ISO 646. A
monitoração de paridade é feita conforme DIN 66219 (paridade par).
São usados dois tipos de mensagens (pelo mestre):
As variáveis e parâmetros tem um formato de 16 bits, ou seja, de -
32767 a +32768 para grandezas com sinal (signed) ou de 0 a 65535
para grandezas sem sinal (unsigned). Todas as grandezas são trata-
das com sinal, exceto as relacionadas com tempo (tempo, período,
frequência, ...).
Além disso, os valores máximo e mínimo devem respeitar o limite da
faixa de parâmetros.
A tabela abaixo mostra as principais grandezas e suas respectivas re-
soluções.
Grandeza
Freqüência
Corrente (CA ou CC)
Tensão (CA ou CC)
Tempo
Percentual
Ganho
RPM
Unidade
H
A
V
s
%
-
RPM
Resolução
0.01Hz/unid.
0.01A/unid.
1V/unid.
0.1s/unid.
0,01%/ unid.
0.01/unid
1RPM/unid](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-127-320.jpg)

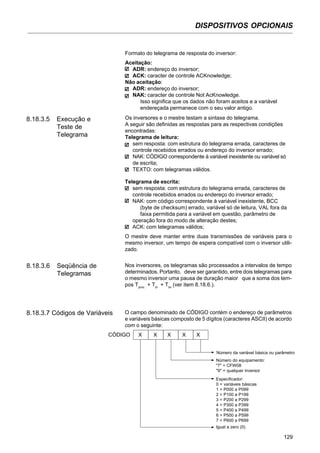




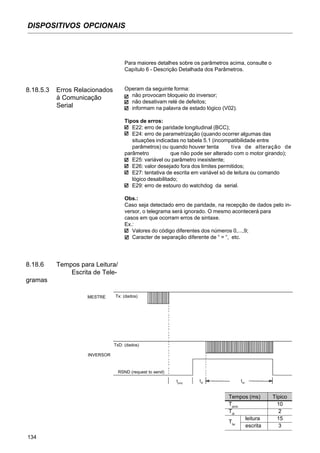

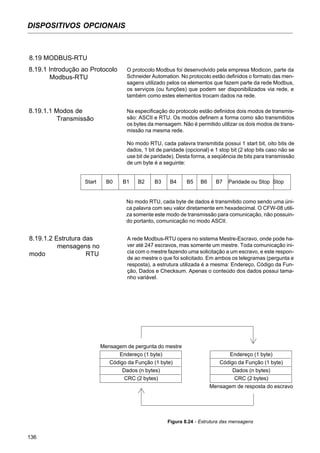
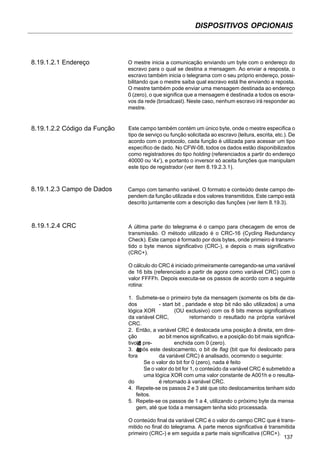


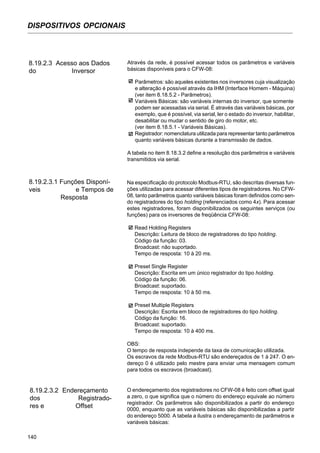



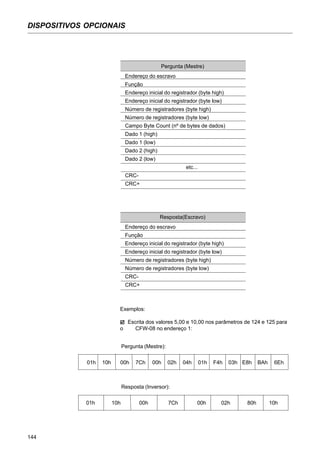
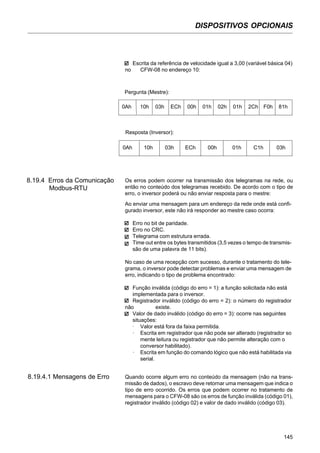



![149
CARACTERÍSTICAS TÉCNICAS
9.2 DADOS DA ELETRÔNICA/GERAIS
Tensão imposta V/F (Escalar) ou
Controle vetorial sensorless (VVC: voltage vector control).
Modulação PWM SVM (Space Vector Modulation).
0 ... 300Hz, resolução de 0,01Hz.
Regulação de Velocidade: 1% da velocidade nominal.
Regulação de Velocidade: 0,5% da velocidade nominal.
CFW-08: 1 entrada isolada, resolução: 7 bits, 0 a +10V ou (0)4 a 20mA,
Impedância: 100k (0 a +10 V), 500 [(0) 4 a 20 mA], funções programáveis.
CFW-08 Plus: 2 entradas isoladas, resolução: 7 bits, 0 a +10V ou (0)4
a 20 mA, Impedância: 100k (0 a +10V),500 [(0) 4 a 20 mA], funções
programáveis.
4 entradas digitais isoladas, 12Vcc, funções programáveis
CFW-08 Plus: 1 saída isoladas, 0 a +10V, RL
10k (carga máx.), resolução:
8 bits, funções programáveis
CFW-08: 1 relé com contatos reversores, 240Vca, 0,5A, funções
programáveis
CFW-08 Plus: 2 relés, um com contato NA (NO) e outro com contato NF
(NC), podendo ser programados para operar como 1 relé reversor,
240Vca, 0,5A, funções programáveis
sobrecorrente/curto-circuito na saída
curto-circuito fase-terra na saída
sub./sobretensão na potência
sobretemperatura na potência
sobrecarga na saída (IxT)
defeito externo
erro de programação
erro no auto-ajuste
defeito no inversor
8 teclas: gira, pára, incrementa, decrementa, sentido de giro, JOG,
local/remoto e programação
Display de led’s (7 segmentos) com 4 dígitos
Led’s para indicação do sentido de giro e para indicação do modo de
operação (LOCAL/REMOTO)
Permite acesso/alteração de todos os parâmetros
Precisão das indicações:
- corrente: 10% da corrente nominal
- resolução velocidade: 1 rpm
- resolução de freqüência: 0,01Hz
Possibilidade de montagem externa utilizando acessórios. Ver capítulo 8.
Inversores a semicondutores
Power Conversion Equipment
Electronic equipment for use in power installations
Safety requirements for electrical equipment for measurement,
control and laboratory use
CONTROLE
MÉTODO
FREQÜÊNCIA
DE SAÍDA
PERFORMANCE
CONTROLE V/F
CONTROLE
VETORIAL
ENTRADAS ANALÓGICAS
(cartão ECC2)
DIGITAIS
SAÍDAS
ANALÓGICA
(cartão ECC2)
RELÉ
SEGURANÇA PROTEÇÃO
INTERFACE
HMI STANDARDHOMEM
MÁQUINA (HMI)
NORMAS
IEC 146
ATENDIDAS
UL 508 C
EN 50178
EN 61010
Ω
Ω
Ω
Ω
≥](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-149-320.jpg)
![150
CARACTERÍSTICAS TÉCNICAS
Os inversores saem de fábrica com os parâmetros ajustados para mo-
tores trifásicos WEG IP55 de IV pólos, freqüência de 60Hz, tensão de
220V para a linha 200-240V ou 380V para a linha 380-480V e com po-
tência de acordo com o indicado nas tabelas dos itens 9.1.1 e 9.1.2.
Os dados do motor utilizado na aplicação deverão ser programados em
P399 a P409 e o valor de P409 (resistência estatórica) obtido pelo Auto-
Ajuste (estimativa de parâmetros via P408).
Na tabela seguinte estão mostrados os dados dos motores WEG
standard para referência.
9.3 DADOS DOS MOTORES
WEG STANDARD IV
PÓLOS
NOTA!
(*)
O inversor considera o valor da resistência do estator como se o mo-
tor estivesse sempre conectado em Y, independentemente da co-
nexão feita na caixa de bornes deste.
O valor da resistência do estator é um valor médio por fase consideran-
do motores com sobreelevação de temperatura ( T) de 100o
C.
Potência [P404]
(CV) (kW)
0,16 0,12
0,25 0,18
0,33 0,25
0,5 0,37
0,75 0,55
1,0 0,75
1,5 1,10
2,0 1,50
3,0 2,20
4,0 3,00
5,0 3,70
6,0 4,50
0,16 0,12
0,25 0,18
0,33 0,25
0,5 0,37
0,75 0,55
1,0 0,75
1,5 1,10
2,0 1,50
3,0 2,20
4,0 3,00
5,0 3,70
6,0 4,50
7,5 5,50
10 7,50
12,5 9,20
Carcaça
63
63
63
71
71
80
80
90S
90L
100L
100L
112M
63
63
63
71
71
80
80
90S
90L
100L
100L
112M
112M
132S
132M
Corrente
[P401]
(Amps)
0,85
1,12
1,42
2,07
2,90
3,08
4,78
6,47
8,57
11,6
13,8
16,3
0,49
0,65
0,82
1,20
1,67
1,78
2,76
3,74
4,95
6,70
7,97
9,41
11,49
15,18
18,48
Velocidade
[P402]
(rpm)
1720
1720
1720
1720
1720
1730
1700
1720
1710
1730
1730
1730
1720
1720
1720
1720
1720
1730
1700
1720
1710
1730
1730
1730
1740
1760
1755
Rendimento a
100% da potência
nominal, η [P399]
(%)
56,0
64,0
67,0
68,0
71,0
78,0
72,7
80,0
79,3
82,7
84,6
84,2
56,0
64,0
67,0
68,0
71,0
78,0
72,7
80,0
79,3
82,7
84,6
84,2
88,5
89,0
87,7
Fator de Potência
a 100% da
potência nominal
cosϕ [P407]
0,66
0,66
0,69
0,69
0,70
0,82
0,83
0,76
0,85
0,82
0,83
0,86
0,66
0,66
0,69
0,69
0,70
0,82
0,83
0,76
0,85
0,82
0,83
0,86
0,82
0,84
0,86
Resistência
do Estator (*)
[P409]
(Ω)
21,77
14,87
10,63
7,37
3,97
4,13
2,78
1,55
0,99
0,65
0,49
0,38
65,30
44,60
31,90
22,10
11,90
12,40
8,35
4,65
2,97
1,96
1,47
1,15
0,82
0,68
0,47
Tensão
[P400]
(V)
220
380
Freqüên-
cia
[P403]
(Hz)
60
60](https://image.slidesharecdn.com/cfw08manual-200601194219/85/Cfw08-manual-150-320.jpg)
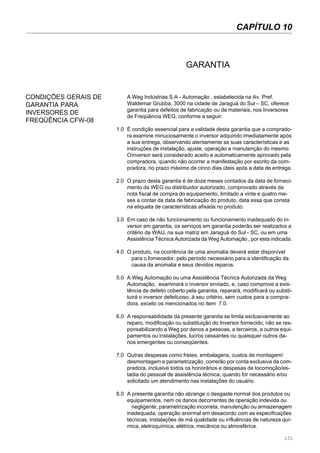
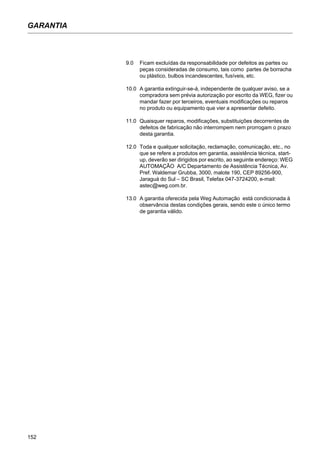

Este manual fornece instruções sobre instalação, operação e manutenção do inversor de frequência CFW-08. Ele descreve os parâmetros, mensagens de erro, capítulos sobre segurança, especificações técnicas e acessórios opcionais. O manual destaca a importância de verificar a versão do software para garantir o correto funcionamento do inversor.















































