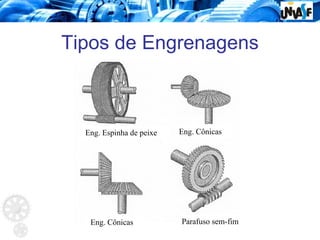
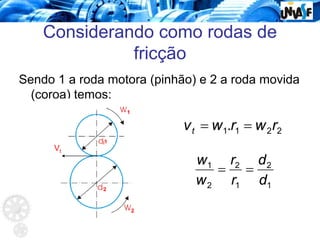
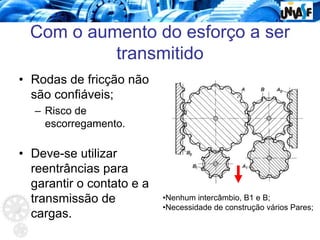
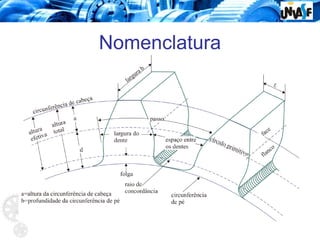
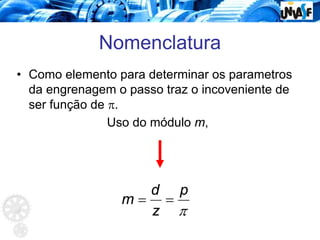
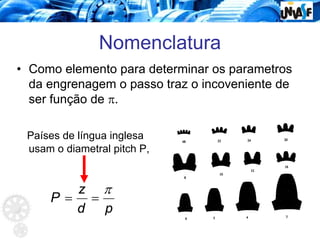
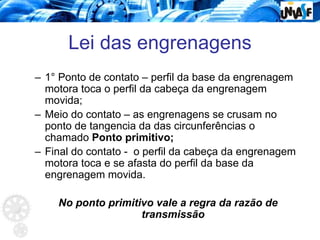
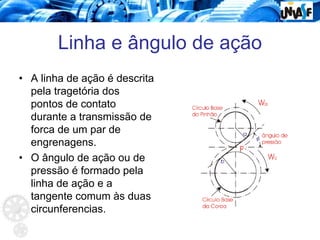
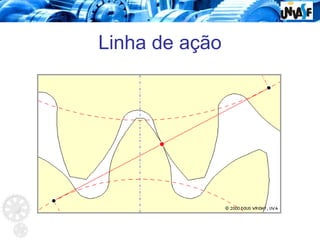
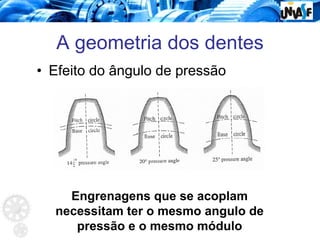
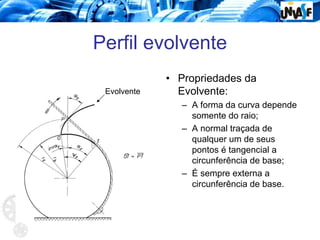
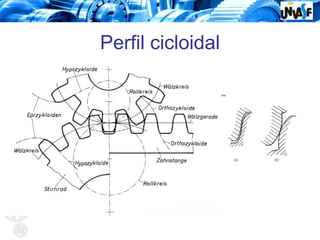
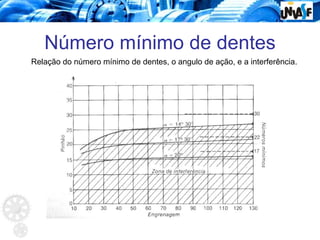
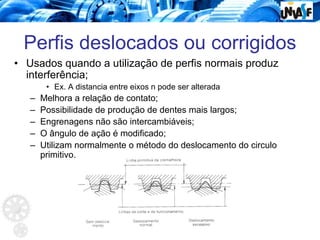
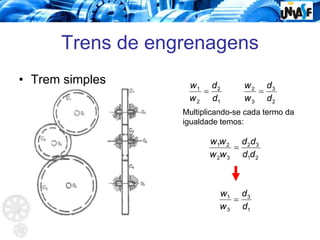
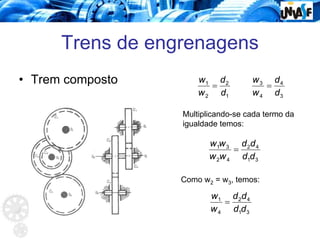
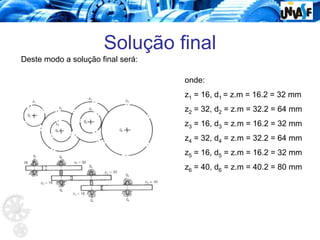
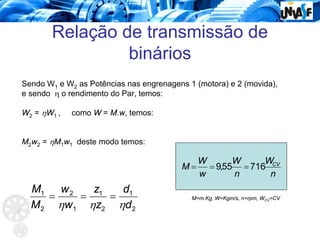
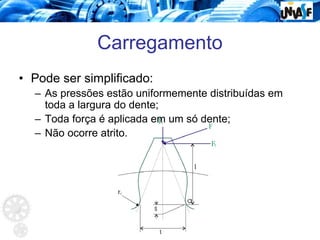
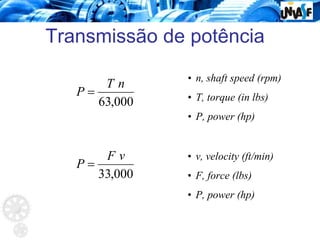
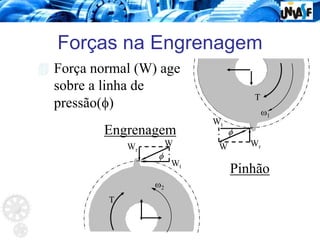
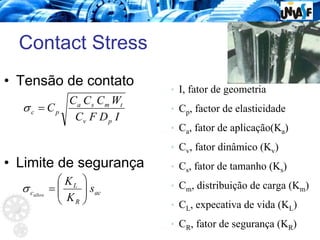
O documento discute tipos de engrenagens cilíndricas de dentes retos, sua função principal de transmissão de movimento rotativo e torque, tipos como pião-cremalheira e helicoidal. Explica conceitos como linha de ação, ângulo de pressão, perfis evolvente e cicloidal, nomenclatura, lei das engrenagens e considerações sobre cálculo de carga e tensões nos dentes.











![Engrenagem teoria completa[1]](https://cdn.slidesharecdn.com/ss_thumbnails/engrenagemteoriacompleta1-180925140702-thumbnail.jpg?width=640&height=640&fit=bounds)


![Engrenagem teoria completa[1]](https://cdn.slidesharecdn.com/ss_thumbnails/engrenagemteoriacompleta1-141202061309-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)
![Engrenagem teoria completa[1]](https://cdn.slidesharecdn.com/ss_thumbnails/engrenagemteoriacompleta1-141202061304-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)





















