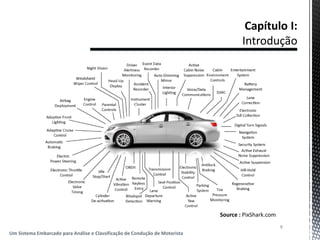
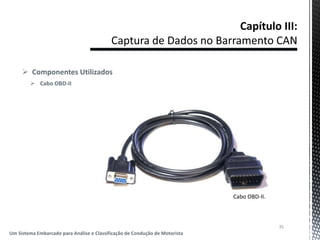
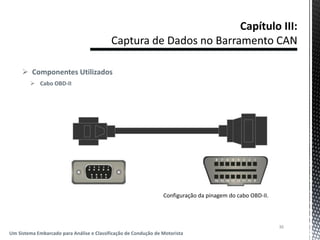
Este documento descreve um sistema embarcado para análise e classificação da condução de motoristas. O sistema captura dados do barramento CAN do veículo, como velocidade, RPM e pressão no pedal do acelerador, e usa algoritmos de inteligência artificial como k-vizinhos mais próximos para classificar o comportamento do motorista com base em frenagens e trocas de marcha. O documento discute os componentes do sistema, como Arduino, CAN-Shield e cabo OBD-II, além da metodologia para captura e análise dos dados em tempo real.

![18
Um Sistema Embarcado para Análise e Classificação de Condução de Motorista
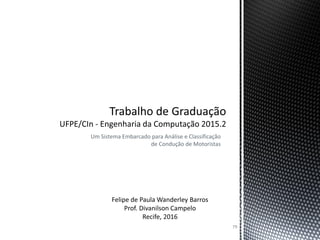
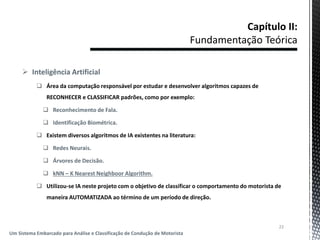
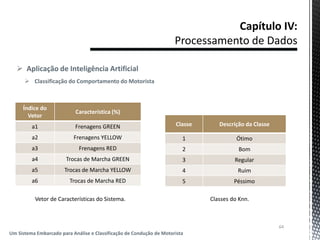
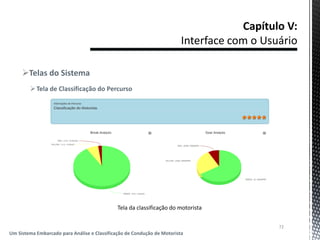
Campos da mensagem do Standard CAN [3].
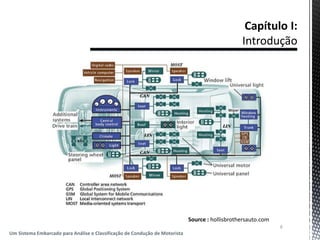
CAN – Controller Area Network
Mensagem CAN
O protocolo CAN possui duas variações de composição de campos de mensagem:
Standard CAN possui 11 bits de ID.
Extended CAN possui 29 bits de ID.
ID: Campo responsável por identificar e por definir a prioridade das mensagens.
IDE: Bit responsável por identificar o padrão utilizado (Standard ou Extended ).
DLC: Indica a quantidade de bytes de dados sendo transmitidos.
DATA: Composto pelos dados sendo transmitidos.](https://image.slidesharecdn.com/17ba2777-2212-40f8-8822-9e0e11cc3b00-160511231557/85/Presentation-An-Embedded-System-for-Analysis-and-Classification-of-a-Driver-s-Conducting-16-320.jpg)
![19
Um Sistema Embarcado para Análise e Classificação de Condução de Motorista
CAN – Controller Area Network
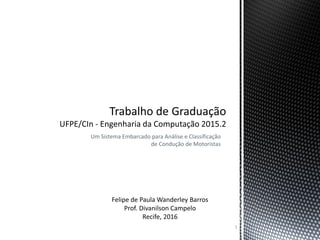
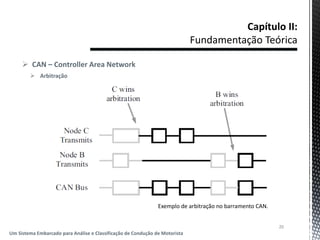
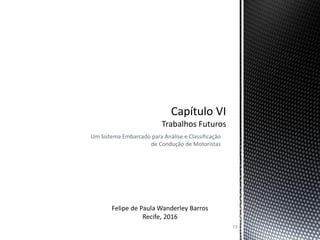
Arbitração
A arbitração é uma característica fundamental do protocolo CAN que garante que mensagens
com maior prioridade poderão trafegar no barramento sem colisões ou erros.
Se dois nós tentam ocupar o barramento no mesmo instante, o acesso ao barramento é
implementado de maneira não destrutiva com uma arbitração bit a bit, garantindo o
barramento para a mensagem com o menor valor de Identifier [3].
Para que a arbitração aconteça, cada nó segue verificando o barramento à medida que
transmite, possibilitando uma comparação entre bit enviado e bit presente no barramento.
Caso uma mensagem com maior prioridade esteja presente no barramento, o nó para
imediatamente a sua transmissão.](https://image.slidesharecdn.com/17ba2777-2212-40f8-8822-9e0e11cc3b00-160511231557/85/Presentation-An-Embedded-System-for-Analysis-and-Classification-of-a-Driver-s-Conducting-17-320.jpg)
![ CAN – Controller Area Network
Verificação de Erro
A robustez do protocolo CAN pode ser atribuída em parte ao abundante procedimento de
verificação de erros.
O protocolo CAN possui cinco diferente métodos de checagem de erro:
Três em nível de mensagem.
Dois em nível de bits.
Se a mensagem falhar em qualquer um deles, esta não é aceita pelo receptor e uma
mensagem de erro é gerada no barramento, obrigando o emissor a reenviar a mensagem até
que esta seja recebida corretamente.
Se um nó começar a enviar mensagens de erro continuamente no barramento, sua capacidade
de transmissão é removida por seu controlador após atingir um limite máximo de mensagens
[3].
21
Um Sistema Embarcado para Análise e Classificação de Condução de Motorista](https://image.slidesharecdn.com/17ba2777-2212-40f8-8822-9e0e11cc3b00-160511231557/85/Presentation-An-Embedded-System-for-Analysis-and-Classification-of-a-Driver-s-Conducting-19-320.jpg)
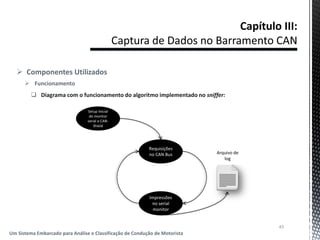
![ Introdução
Etapa inicial do projeto cujo objetivo era ACESSAR o barramento CAN de um carro em
funcionamento, e colher informações a respeito do status do veículo.
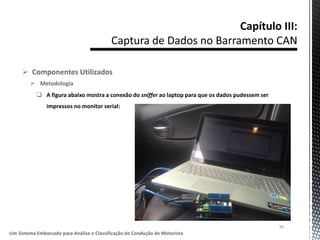
Construi-se um sniffer* para se conectar à entrada de diagnósticos automotivos conhecida
como OBD-II para colher, em tempo real, informações como:
Velocidade Instantânea.
Rotações por Minuto.
Pressão exercida no pedal do acelerador.
Estes dados foram então salvos em arquivos de log pra serem utilizados na etapa descrita no
próximo capítulo.
27
Um Sistema Embarcado para Análise e Classificação de Condução de Motorista
*Em redes de computadores, sniffer é o termo designado para uma ferramenta de hardware ou software
capaz de se conectar a uma rede, interceptar e registrar o tráfego de dados. Esta ferramenta ainda é capaz
de capturar cada pacote, decodificá-lo e analisar seu conteúdo [6].](https://image.slidesharecdn.com/17ba2777-2212-40f8-8822-9e0e11cc3b00-160511231557/85/Presentation-An-Embedded-System-for-Analysis-and-Classification-of-a-Driver-s-Conducting-25-320.jpg)

![ MITCHELL, Tom. Machine Learning. McGraw-Hill, 1997.
DUDA, Richard O.; HART, Peter E.; STORK, David G. Pattern Classification. Second Edition. Wiley-Interscience, 2000.
CORRIGAN, Steve. Introduction to the Controller Area Network (CAN). Texas Instruments, 2008.
Wikipedia, (2016). OBD-II PIDs. [Online] Disponível em: https://en.wikipedia.org/wiki/OBD-II_PIDs [Acessado 17 Jan.
2016].
FIELDING, GETTYS, MOGUL; Hypertext Transfer Protocol -- HTTP/1.1. [Online] Disponível em:
https://www.w3.org/Protocols/rfc2616/rfc2616.txt [Acessado 13 Jan. 2016].
Wikipedia, (2016). Packet Analyzer. [Online] Disponível em: https://en.wikipedia.org/wiki/Packet_analyzer [Acessado 13
Jan. 2016].
Arduino, (2016). Arduino Uno. [Online] Disponível em: https://www.arduino.cc/en/Main/ArduinoBoardUno [Acessado 14
Jan. 2016].
77
Um Sistema Embarcado para Análise e Classificação de Condução de Motorista](https://image.slidesharecdn.com/17ba2777-2212-40f8-8822-9e0e11cc3b00-160511231557/85/Presentation-An-Embedded-System-for-Analysis-and-Classification-of-a-Driver-s-Conducting-75-320.jpg)
![ Seeed, (2016). CAN-Bus Shield. [Online] Disponível em: http://www.seeedstudio.com/wiki/CAN-
BUS_Shield#Getting_Started [Acessado 14 Jan. 2016].
Intel, (2016). Intel Edison. [Online] Disponível em:
http://download.intel.com/support/edison/sb/edison_pb_331179002.pdf [Acessado 14 Jan. 2016].
Django Project, (2016). Django. [Online] Disponível em: https://www.djangoproject.com/ [Acessado 17 Jan. 2016].
VALASEK, MILLER, (2014). Adventures in Automotive Networks and Control Units. [Online] Disponível em:
http://www.ioactive.com/pdfs/IOActive_Adventures_in_Automotive_Networks_and_Control_Units.pdf [Acessado 25 Jan.
2016].
78
Um Sistema Embarcado para Análise e Classificação de Condução de Motorista](https://image.slidesharecdn.com/17ba2777-2212-40f8-8822-9e0e11cc3b00-160511231557/85/Presentation-An-Embedded-System-for-Analysis-and-Classification-of-a-Driver-s-Conducting-76-320.jpg)