Transferir como PDF, PPTX

![Representac¸˜ao de imagens digitais
O n´umero de n´ıveis de intensidade costumam ser igualmente
espac¸ados no intervalo [0, L − 1] e representados por uma potˆencia
inteira de 2: L = 2k, onde k ´e o n´umero de bits armazenado por
pixel.
O n´umero b de bits necess´arios para armazenar uma imagem
digitalizada ´e b = MxNxk
(Para M = N, b = N2k)](https://image.slidesharecdn.com/pi2-140508060508-phpapp01/85/Fundamentos-da-Imagem-Digital-17-320.jpg)


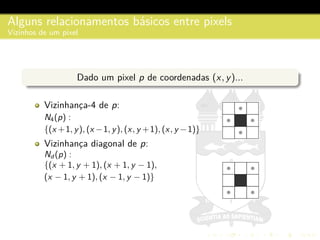



De(p, q) = [(x − s)2 + (y − t)2]( 1
2
)
D4(p, q) =| x − s | + | y − t |D4(p, q) =| x − s | + | y − t |
Ds (p, q) = max(| x − s |, | y − t |)Ds (p, q) = max(| x − s |, | y − t |)](https://image.slidesharecdn.com/pi2-140508060508-phpapp01/85/Fundamentos-da-Imagem-Digital-46-320.jpg)





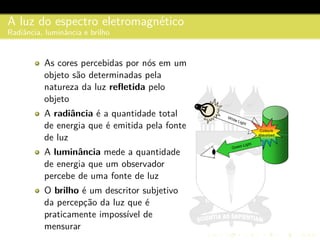
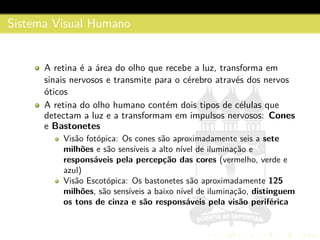
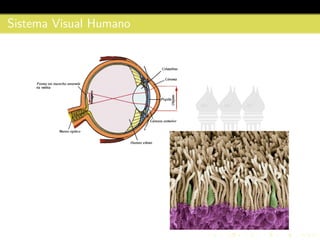
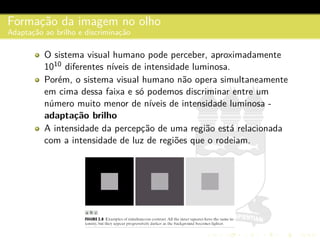
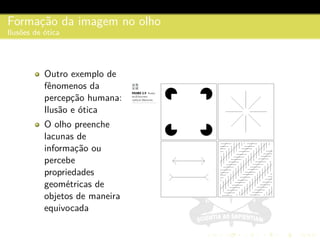
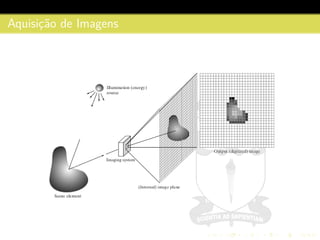
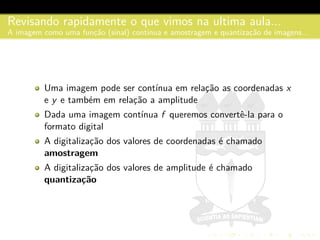
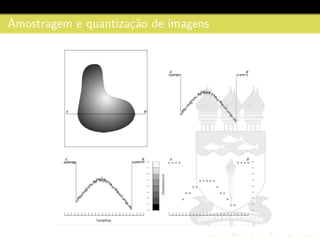
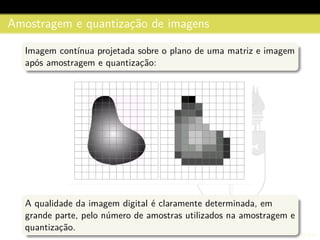
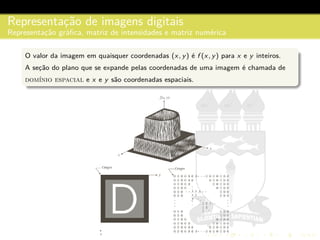
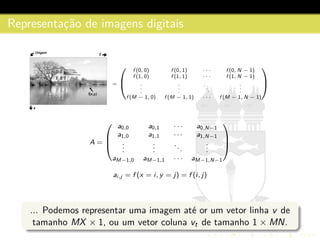
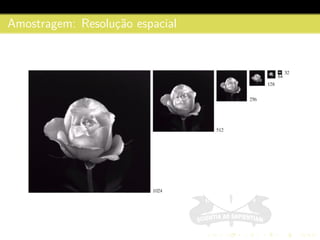
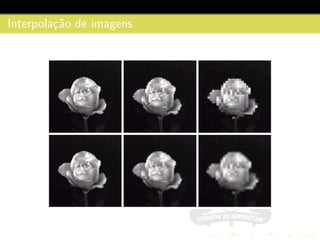
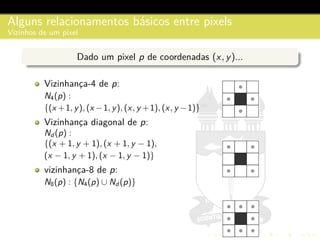
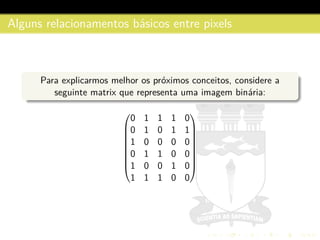
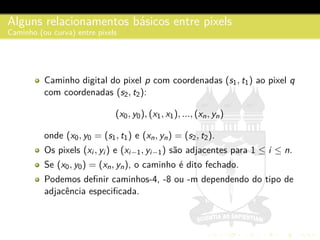
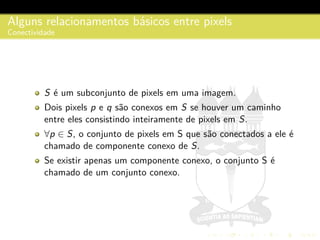
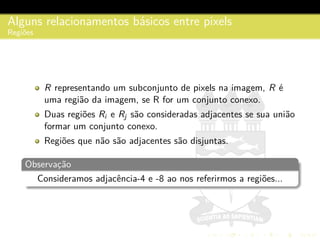
1) O documento discute fundamentos da imagem digital, incluindo a natureza da luz, formação de imagens no olho humano, aquisição e representação de imagens digitais. 2) É explicado como a luz interage com o Sistema Visual Humano através da retina, e como as células de cones e bastonetes percebem cores e luminosidade. 3) São descritos conceitos como amostragem, quantização, interpolação e relacionamentos entre pixels na representação digital de imagens.









![[Robson] 3. Método Simplex](https://cdn.slidesharecdn.com/ss_thumbnails/simplex-120311172412-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)

![[Robson] 1. Programação Linear](https://cdn.slidesharecdn.com/ss_thumbnails/pl-111210174628-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)


![[Alexandre] 8. Não Linear Restrita](https://cdn.slidesharecdn.com/ss_thumbnails/restrita-01-120327145714-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Robson] 7. Programação Não Linear Irrestrita](https://cdn.slidesharecdn.com/ss_thumbnails/irrestrita01-120311165949-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Alexandre] 2. Geometria](https://cdn.slidesharecdn.com/ss_thumbnails/geometria-120327135217-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)

![[Robson] 6. Otimização de Grande Porte](https://cdn.slidesharecdn.com/ss_thumbnails/column-120310161439-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)

























![Apresentação1[1]](https://cdn.slidesharecdn.com/ss_thumbnails/apresentao11-100527092702-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)



