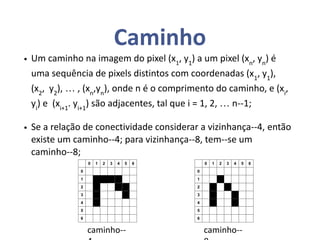
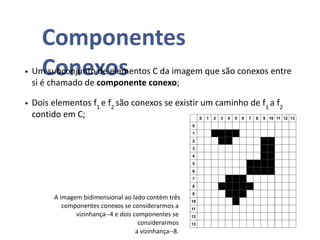
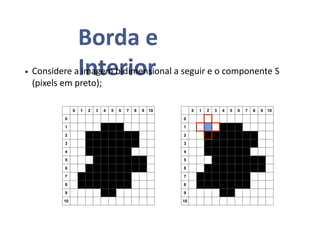
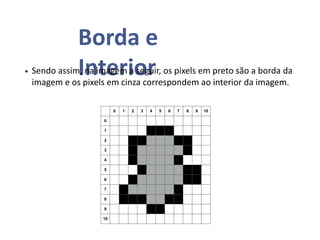
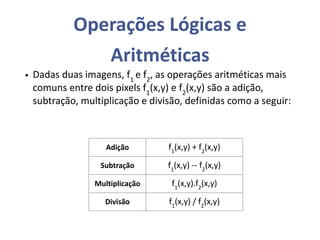
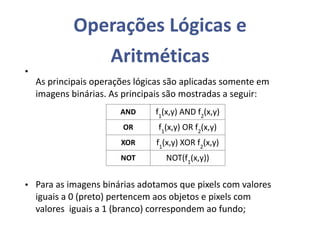
O documento aborda o processamento de imagens, explorando conceitos como resolução espacial e profundidade de pixels, que impactam na qualidade da imagem. Também discute a conectividade entre elementos, a definição de bordas e interiores, além de operações aritméticas e lógicas aplicadas em imagens. Exemplos e definições matemáticas são fornecidos para ilustrar as relações entre pixels e suas aplicações práticas.