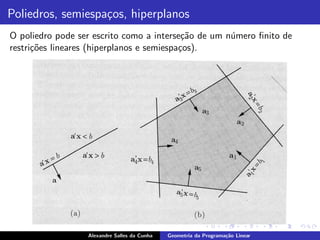
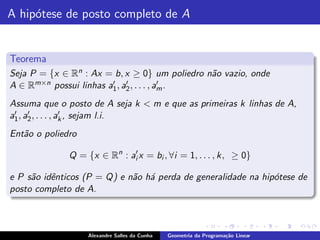
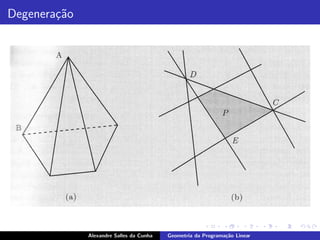
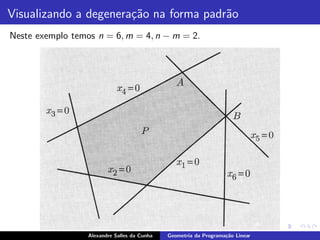
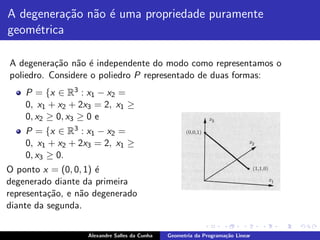
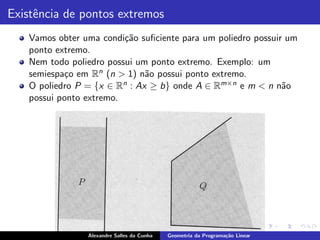
O documento descreve conceitos básicos de geometria da programação linear, incluindo definições de poliedros, semiespaços, hiperplanos e suas relações. Também apresenta definições equivalentes de pontos extremos, vértices e soluções básicas de um poliedro.
![Ponto extremo
Defini¸˜o
ca
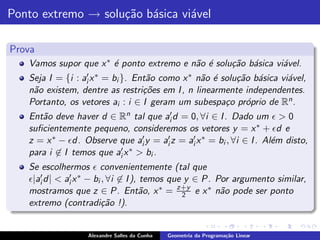
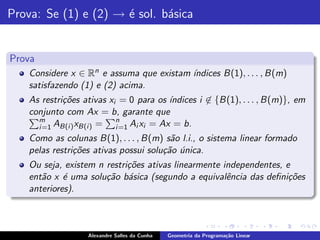
Seja P um poliedro. Um vetor x ∈ P ´ um ponto extremo de P se n˜o for
e a
poss´ escrever x como uma combina¸˜o linear convexa de dois pontos
ıvel ca
z, y ∈ P (distintos de x). Isto ´, n˜o existem z, y ∈ P, z, y = x e
e a
λ ∈ [0, 1] tal que x = λz + (1 − λ)y .
Alexandre Salles da Cunha Geometria da Programa¸˜o Linear
ca](https://image.slidesharecdn.com/geometria-120327135217-phpapp02/85/Alexandre-2-Geometria-7-320.jpg)
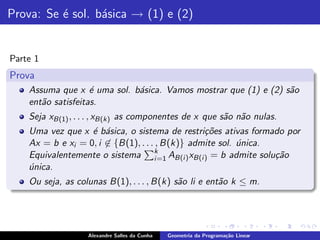
![Prova: v´rtice → ponto extremo
e
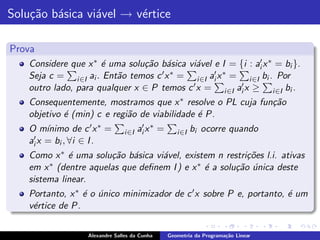
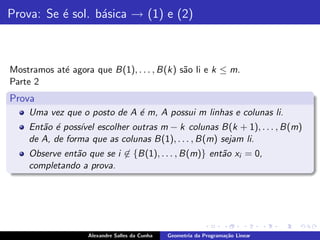
Sem perda de generalidade, vamos assumir que P seja escrito em termos
de restri¸˜es de igualdade ai′ x = bi e desigualdade na forma ai′ x ≥ bi .
co
Prova
Suponha que x ∗ seja um v´rtice de P. Ent˜o, por defini¸˜o, existe
e a ca
c ∈ Rn tal que c ′ x ∗ < c ′ y para qualquer y ∈ P, y = x.
Ent˜o tome y , z ∈ P distintos de x ∗ e λ ∈ [0, 1].
a
Temos que c ′ x ∗ < c ′ (λy + (1 − λ)z) e consequentemente
x ∗ = λy + (1 − λ)z.
Logo o v´rtice x n˜o pode ser escrito como combina¸˜o convexa de
e a ca
dois outros pontos quaisquer de P e, portanto, o v´rtice ´ tamb´m
e e e
um ponto extremo.
Alexandre Salles da Cunha Geometria da Programa¸˜o Linear
ca](https://image.slidesharecdn.com/geometria-120327135217-phpapp02/85/Alexandre-2-Geometria-18-320.jpg)
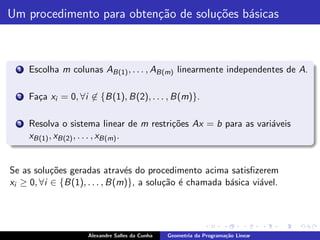
![Nomenclatura
As colunas B(1), . . . , B(m) s˜o denominadas b´sicas, assim como as
a a
vari´veis de decis˜o a elas associadas.
a a
As demais colunas (e vari´veis) s˜o denominadas n˜o b´sicas.
a a a a
A matriz B (m × m) formada pelas colunas b´sicas,
a
B = [AB(1) AB(2) · · · AB(m) ], ´ chamada base.
e
As vari´veis b´sicas xB s˜o obtidas resolvendo-se o sistema linear:
a a a
xB = B −1 b.
Se xB ≥ 0, x ´ uma solu¸˜o b´sica vi´vel.
e ca a a
Alexandre Salles da Cunha Geometria da Programa¸˜o Linear
ca](https://image.slidesharecdn.com/geometria-120327135217-phpapp02/85/Alexandre-2-Geometria-31-320.jpg)
![[Robson] 1. Programação Linear](https://cdn.slidesharecdn.com/ss_thumbnails/pl-111210174628-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Robson] 6. Otimização de Grande Porte](https://cdn.slidesharecdn.com/ss_thumbnails/column-120310161439-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Robson] 3. Método Simplex](https://cdn.slidesharecdn.com/ss_thumbnails/simplex-120311172412-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Robson] 7. Programação Não Linear Irrestrita](https://cdn.slidesharecdn.com/ss_thumbnails/irrestrita01-120311165949-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Alexandre] 8. Não Linear Restrita](https://cdn.slidesharecdn.com/ss_thumbnails/restrita-01-120327145714-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Robson] 5. Análise de Sensibilidade](https://cdn.slidesharecdn.com/ss_thumbnails/sensibilidade-120311174016-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Robson] 4. Dualidade](https://cdn.slidesharecdn.com/ss_thumbnails/dualidade-120311163806-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)





































