CA_Capitulo 4- Analise da Estabilidade[Compatibility Mode].pdf
1.
1
4. ANÁLISE DAESTABILIDADE DE
SISTEMAS DE CONTROLO COM
REALIMENTAÇÃO
FACULDADE DE ENGENHARIA
DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA: CONTROLO AUTOMATICO
Docentes: Profª Doutora Isabel Guiamba e Engo Ambrósio
Semestre: Fevereiro / Junho, 4º Ano
2.
2
4.1 Conceito deEstabilidade
Considera-se que um sistema dinâmico é estável se, para todas as
estradas limitadas, produz saídas limitadas, independentemente do seu
estado inicial.
Uma entrada “limitada” é aquela que permanece sempre entre um
limite superior e um limite inferior.
Saídas “ilimitadas” existem apenas em teoria, pois na prática todas as
quantidades físicas são limitadas. Portanto, o tempo “ilimitado” quer
dizer muito grande.
Todos os sistemas que não são estáveis de acordo com a definição
anterior, chamam-se instáveis.
3.
3
Consideremos um sistemadinâmico com uma entrada m e uma saída y. O
seu comportamento dinâmico pode ser descrito pela função de
transferência G(s).
A função G(s) pode ser de um sistema não controlado ou pode ser a
função de transferência em circuito fechado de um sistema controlado.
A análise de estabilidade pode fazer-se independentemente de o sistema
ser controlado ou não.
A localização dos polos da função de transferência dá-nos o primeiro
critério para verificar a estabilidade de um sistema:
Se a função de transferência de um sistema dinâmico tem pelo menos um
polo com parte real positiva, o sistema é instável.
)
(
)
(
)
( s
m
s
G
s
y =
4.
4
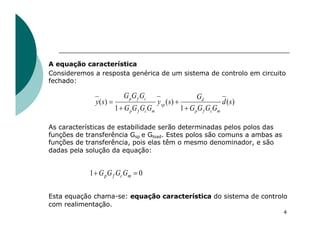
A equação característica
Consideremosa resposta genérica de um sistema de controlo em circuito
fechado:
As características de estabilidade serão determinadas pelos polos das
funções de transferência Gsp e Gload. Estes polos são comuns a ambas as
funções de transferência, pois elas têm o mesmo denominador, e são
dadas pela solução da equação:
Esta equação chama-se: equação característica do sistema de controlo
com realimentação.
)
(
1
)
(
1
)
( s
d
G
G
G
G
G
s
y
G
G
G
G
G
G
G
s
y
m
c
f
p
d
sp
m
c
f
p
c
f
p
+
+
+
=
0
1 =
+ m
c
f
p G
G
G
G
5.
Sejam p1, p2,...,pn as n raízes da equação característica
1+ Gp Gf Gc Gm= (s-p1) (s-p2) ... (s-pn)
Critério de estabilidade de um sistema em circuito fechado:
Um sistema de controlo com realimentação é estável se todas as
raízes da sua equação característica tem partes reais negativas.
Se qualquer das raízes da equação característica estiver sobre ou à
direita do eixo imaginário do sistema é instável .
5
6.
OBSERVAÇÕES
1. Ao produto
chama-sefunção de transferência em circuito aberto, pois
relaciona a indicação de medida, ym com o ponto de ajustamento, ysp se
o circuito for aberto imediatamente antes do comparador, ou seja:
A equação característica pode representar-se como:
podendo se verificar que ela depende apenas das funções de
transferência dos elementos do circuito.
2. As raízes da equação característica são também os polos das funções de
transferência em circuito fechado, Gsp e Glood. Por esta razão chamam-
se, muitas vezes, polos em circuito fechado. 6
)
(
)
(
)
( s
y
s
G
s
y sp
OL
m =
m
c
f
p
OL G
G
G
G
G =
0
1 =
+ OL
G
7.
4.2 CRITÉRIO DEESTABILIDADE DE ROUTH-
HURWITZ
O critério de estabilidade de sistemas em circuito fechado não requer o
cálculo de valores das razões do polinómio característico. Requer
apenas o conhecimento de se alguma raiz está à direita do eixo
imaginário. O critério de Routh-Hurwitz permite fazer este teste.
Expandindo a equação característica sob a forma de polinómio, obtemos
1 + Gp Gf Gc Gm = a0 sn + a1 sn-1+...+ an-1 s + an = 0
Seja ao positivo. Se não fôr, multiplicar ambos os lados da equação por
–1
7
8.
Primeiro teste
Se algumdos coeficientes a0, a1, a2, ..., an-1, an fôr negativo, há pelo
menos uma raíz da equação característica que tem parte real positiva e
o sistema é instável. Não é necessário prosseguir a análise.
Segundo teste
Se todos os coeficientes a0, a1, a2, ..., an-1, an são positivos, então nada
se pode concluir do primeiro teste sobre a localização das raízes.
Forme-se o seguinte diagrama Diagrama de Routh.
8
9.
Diagrama de Routh
Fila1 ao a2 a4 a6 ...
2 a1 a3 a5 a7 ...
b1 b2 b3 ...
c1 c2 c3 ...
d1 d2 d3 ...
… … … … …
n+1 w1 w2 ...
onde:
9
1
3
0
2
1
1
a
a
a
a
a
b
-
=
1
5
0
4
1
2
a
a
a
a
a
b
-
=
1 5 1 3
1 3 1 2
1 2
1 1
b a a b
b a a b
c c
b b
-
-
= =
10.
Examine os elementosda primeira coluna do diagrama anterior: a0
a1 b1 c1 d1 ... w1
Se qualquer destes elementos fôr negativo existe pelo menos uma
raíz à direita do eixo imaginário e o sistema é instável.
O número de mudanças de sinal nos elementos da primeira coluna é
igual ao número de raízes à direita do eixo imaginário.
Portanto, o sistema é estável se todos os elementos da primeira
coluna do diagrama de Routh forem positivos e não nulos.
10
11.
Se existir umpar de raízes no eixo imaginário e todas as outras raízes
estiverem na metade esquerda do plano, todos os elementos da linha n
desaparecem e nenhum elemento das linhas anteriores se anula. A
localização do par de raízes imaginárias pode obter-se resolvendo a
equação
Cs2 + D = 0
onde os coeficientes C e D são os elementos do diagrama na fila (n-1)
lidos da esquerda para a direita, respectivamente.
11
12.
4.3 ANÁLISE DOLUGAR DAS RAÍZES
O método do lugar das raízes (ou lugar geométrico das raízes) é um
procedimento gráfico para encontrar as raízes da equação característica:
1 + G = 0
à medida que um dos parâmetros de G varia continuamente.
O parâmetro que iremos variar é o ganho do controlador (ou
sensibilidade) Kc.
12
13.
Consideremos duas capacidadesem série com uma função de
transferência
Seja Gm = Gf = 1 e Gc = kc
Então a equação característica é:
ou ( t1s + 1 ) (t2s + 1) + k =0 ; c/ k = kp kc
13
( )
( ) ( )
1 2
1 1
p
p
k
G s
s s
t t
=
+ +
( ) ( )
1 2
1 0
1 1
p
c
k
k
s s
t t
+ =
+ +
14.
1. Quando k= 0 (i e kc =0) a equação característica tem como suas
raízes os polos do processo:
2. À medida que k aumenta, as raízes da equação característica são dadas
por
São raízes reais, negativas e diferentes enquanto
ou seja
o que quer dizer, enquanto (1)
14
1 2
1 2
1 1
p e p
t t
- -
= =
( ) ( ) ( )
2
1
2
1
2
2
1
2
1
2
,
1
2
1
4
t
t
t
t
t
t
t
t k
p
+
-
+
±
+
-
=
( ) ( ) 0
1
4 2
1
2
2
1 >
+
-
+ k
t
t
t
t
( )
2
1 2
1 2
1
4
k
t t
t t
+
< -
( )
2
1 2
1 2
1
1
4
C
p
k
k
t t
t t
é ù
+
< -
ê ú
ê ú
ë û
15.
3. Quando (2)
temosduas raízes reais e iguais:
4. Para (3)
temos, de novo, raízes diferentes que são complexos conjugados:
De notar que a parte real é dada por
e é independente de k, enquanto que a parte imaginária tende para
infinito à medida que k → ∞.
15
( )
2
1 2
1 2
1
1
4
C
p
K
K
t t
t t
é ù
+
= -
ê ú
ê ú
ë û
2
1
2
1
2
1
2 t
t
t
t +
-
=
= p
p
( )
2
1 2
1 2
1
1
4
C
p
K
K
t t
t t
é ù
+
> -
ê ú
ê ú
ë û
( ) ( ) ( )
2
1 2 1 2 1 2
1,2
1 2
4 1
2
j k
p
t t t t t t
t t
+ ± + - +
= -
2
1
2
1
2 t
t
t
t +
-
16.
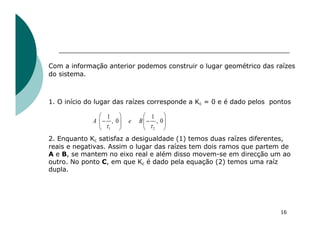
Com a informaçãoanterior podemos construir o lugar geométrico das raízes
do sistema.
1. O início do lugar das raízes corresponde a Kc = 0 e é dado pelos pontos
2. Enquanto Kc satisfaz a desigualdade (1) temos duas raízes diferentes,
reais e negativas. Assim o lugar das raízes tem dois ramos que partem de
A e B, se mantem no eixo real e além disso movem-se em direcção um ao
outro. No ponto C, em que Kc é dado pela equação (2) temos uma raíz
dupla.
16
1 2
1 1
, 0 , 0
A e B
t t
æ ö æ ö
- -
ç ÷ ç ÷
è ø è ø
17.
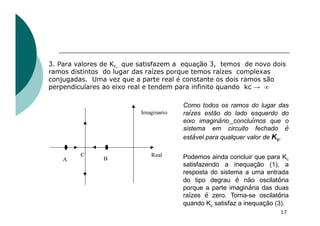
3. Para valoresde Kc, que satisfazem a equação 3, temos de novo dois
ramos distintos do lugar das raízes porque temos raízes complexas
conjugadas. Uma vez que a parte real é constante os dois ramos são
perpendiculares ao eixo real e tendem para infinito quando kc → ¥
17
Real
Imaginario
B
A
C
Como todos os ramos do lugar das
raízes estão do lado esquerdo do
eixo imaginário concluímos que o
sistema em circuito fechado é
estável para qualquer valor de Kc.
Podemos ainda concluir que para Kc
satisfazendo a inequação (1), a
resposta do sistema a uma entrada
do tipo degrau é não oscilatória
porque a parte imaginária das duas
raízes é zero. Torna-se oscilatória
quando Kc satisfaz a inequação (3).
18.
REGRAS PARA ACONSTRUCÇÃO DO LUGAR GEOMÉTRICO
DAS RAÍZES (REALIMENTAÇÃO NEGATIVA)
Nas regras seguintes o número de polos (n) é maior ou igual ao número
de zeros (m).
Regra 1 - O número de ramos do lugar geométrico das raízes é igual ao
número de polos em circuito aberto, n.
Regra 2 - Os ramos começam nos polos em circuito aberto e terminam
nos zeros em circuito aberto. Os (n–m) ramos terminarão no infinito. No
caso de polos de ordem q, nascerão aí q ramos. Para zeros de ordem q
aí terminarão q ramos.
Regra 3 - Ramos no eixo real – O eixo real é parte do lugar das raízes
quando a soma do número de polos e zeros à direita de um ponto no eixo
real é ímpar. Polos e zeros de ordem q devem contar-se q vezes ao
aplicar a regra.
18
19.
Regra 4 -Assíntotas – Há (n – m) ramos que tendem assintoticamente
(à medida que k→ ∞) para (n – m) linhas rectas que partem do centro
de gravidade dos polos e dos zeros da função de transferência em circuito
aberto.
O centro de gravidade é dado por:
Estas linhas assintóticas fazem ângulos de π[(2k+1)/(n-m)] com o eixo
real e estão igualmente espaçados em ângulos de 2 π/ (n-m).
Onde: (k = 0, 1, 2, ...., n–m-1).
Regras 5 – Ponto de separação – O ponto no qual dois ramos, que
emergem de polos adjacentes ou que se dirigem para zeros adjacentes no
eixo real se intersetam e deixam (ou entram) no eixo real determina-se
pela solução da equação
Estes ramos deixam (ou entram) no eixo real com ângulos ± p /2 .
19
1 1
n m
j i
j i
p z
n m
g = =
-
=
-
å å
å
å
=
= -
=
-
n
j j
m
j i p
s
z
s 1
1
1
1
20.
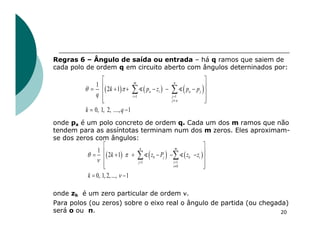
Regras 6 –Ângulo de saída ou entrada – há q ramos que saiem de
cada polo de ordem q em circuito aberto com ângulos deterninados por:
onde pa é um polo concreto de ordem q. Cada um dos m ramos que não
tendem para as assíntotas terminam num dos m zeros. Eles aproximam-
se dos zeros com ângulos:
onde zb é um zero particular de ordem n.
Para polos (ou zeros) sobre o eixo real o ângulo de partida (ou chegada)
será o ou π. 20
( ) ( ) ( )
1 1
1
2 1
0, 1, 2, ...., 1
m n
a i a j
i j
j a
k p z p p
q
k q
q p
= =
¹
é ù
ê ú
= + + - - -
ê ú
ê ú
ë û
= -
å å
( ) ( ) ( )
1 1
1
2 1
0, 1, 2,..., 1
n m
b j b i
j i
i b
k z P z z
k
q p
n
n
= =
¹
é ù
ê ú
= + + - - -
ê ú
ê ú
ë û
= -
å å





![Regra 4 - Assíntotas – Há (n – m) ramos que tendem assintoticamente
(à medida que k→ ∞) para (n – m) linhas rectas que partem do centro
de gravidade dos polos e dos zeros da função de transferência em circuito
aberto.
O centro de gravidade é dado por:
Estas linhas assintóticas fazem ângulos de π[(2k+1)/(n-m)] com o eixo
real e estão igualmente espaçados em ângulos de 2 π/ (n-m).
Onde: (k = 0, 1, 2, ...., n–m-1).
Regras 5 – Ponto de separação – O ponto no qual dois ramos, que
emergem de polos adjacentes ou que se dirigem para zeros adjacentes no
eixo real se intersetam e deixam (ou entram) no eixo real determina-se
pela solução da equação
Estes ramos deixam (ou entram) no eixo real com ângulos ± p /2 .
19
1 1
n m
j i
j i
p z
n m
g = =
-
=
-
å å
å
å
=
= -
=
-
n
j j
m
j i p
s
z
s 1
1
1
1](https://image.slidesharecdn.com/cacapitulo4-analisedaestabilidadecompatibilitymode-250516190231-61c83aac/85/CA_Capitulo-4-Analise-da-Estabilidade-Compatibility-Mode-pdf-19-320.jpg)