Baixar para ler offline
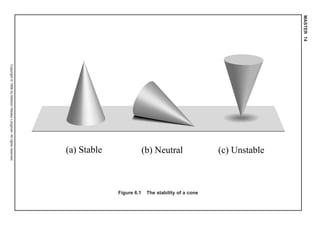
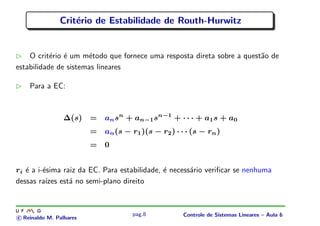
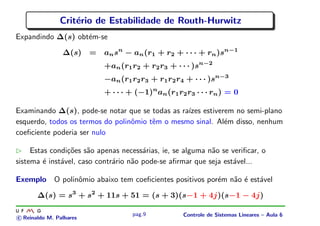
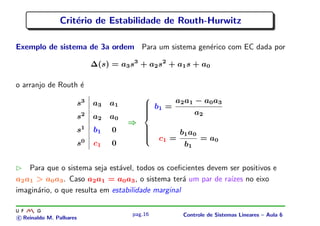
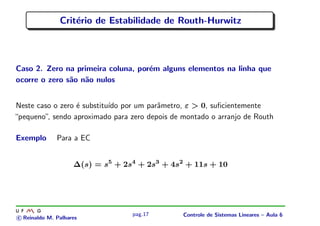
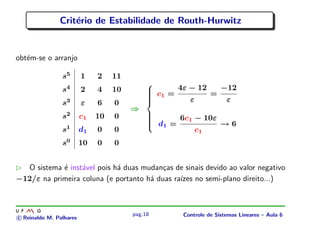
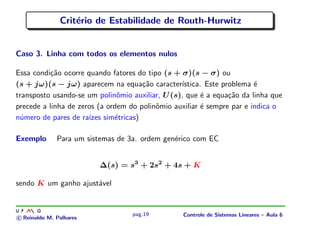
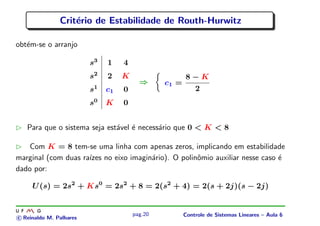
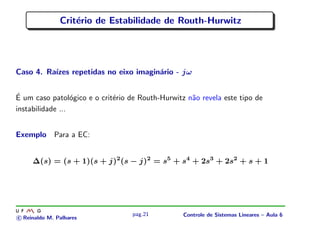
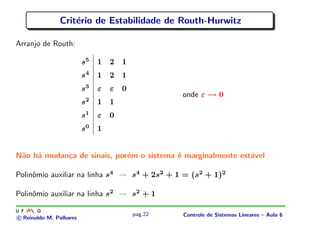

[1] O documento discute conceitos de estabilidade de sistemas lineares realimentados e o critério de Routh-Hurwitz para verificar a estabilidade desses sistemas. [2] O critério de Routh-Hurwitz analisa os sinais dos elementos da primeira coluna de um arranjo formado pelos coeficientes do polinômio característico do sistema. [3] Se todos os elementos tiverem o mesmo sinal, o sistema é estável, pois não haverá raízes com parte real positiva que tornariam o sistema instável.






































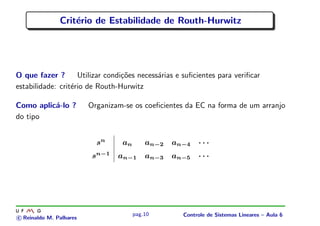
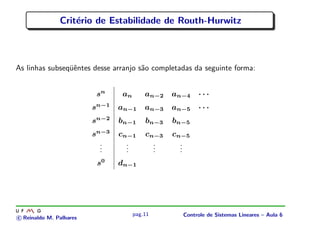
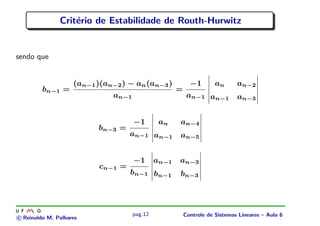
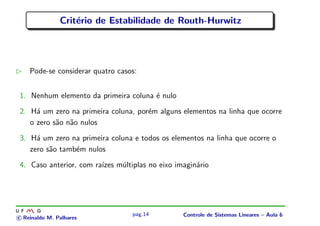
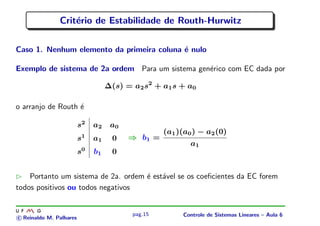
![CA_Capitulo 4- Analise da Estabilidade[Compatibility Mode].pdf](https://cdn.slidesharecdn.com/ss_thumbnails/cacapitulo4-analisedaestabilidadecompatibilitymode-250516190231-61c83aac-thumbnail.jpg?width=640&height=640&fit=bounds)











