![Felipe P Carpes [email_address] www.ufsm.br/gepec/biomec Tipos de análises mecânicas](https://image.slidesharecdn.com/aula8-tiposdeanalisesmecanicas-091111120101-phpapp02/85/Aula-8-Tipos-De-Analises-Mecanicas-1-320.jpg)
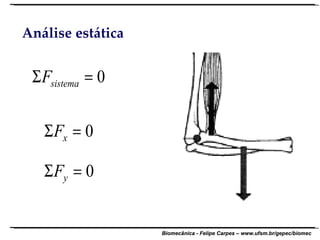
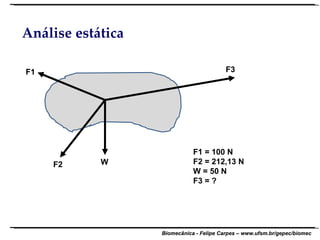
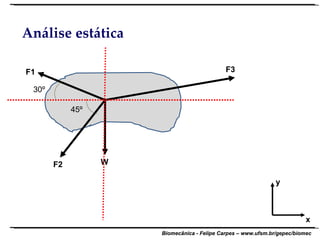
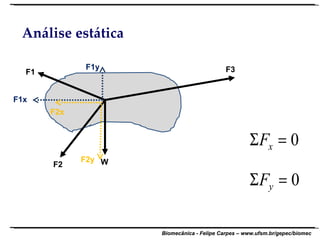
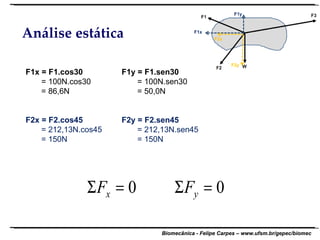
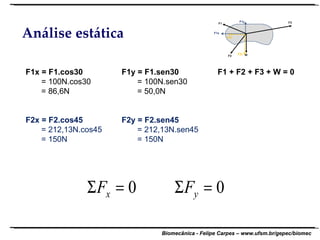
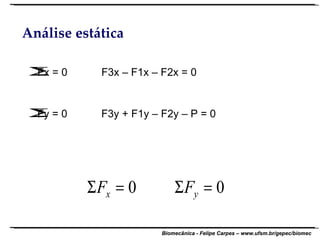
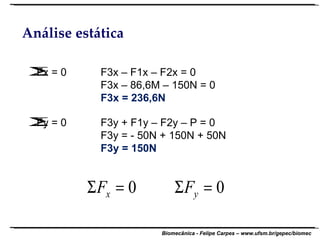
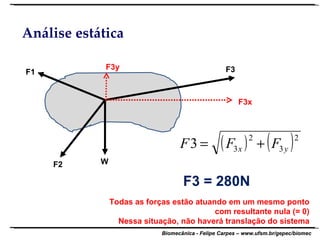
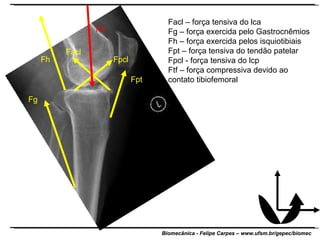
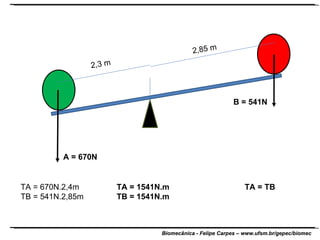
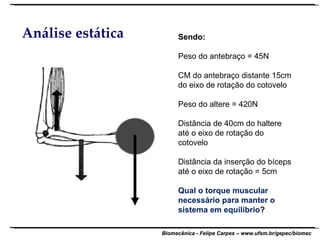
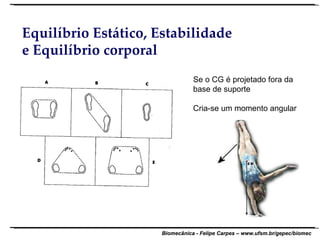

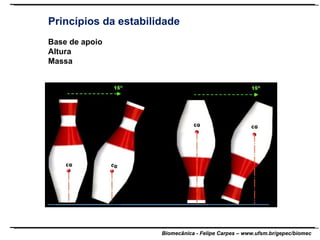
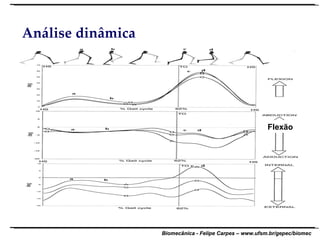
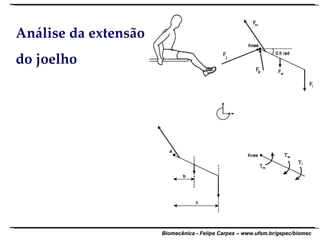
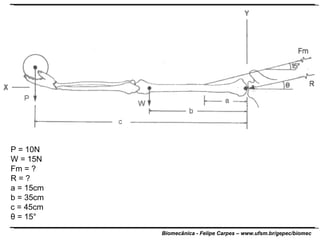

Este documento discute os conceitos de análise mecânica estática e dinâmica aplicados ao movimento articular. Apresenta exemplos de cálculos estáticos para determinar forças desconhecidas em equilíbrio e discute conceitos como torque, potência muscular, trabalho e energia. Também aborda a análise dinâmica da flexão e extensão do joelho.





































































