![Felipe P Carpes [email_address] www.ufsm.br/gepec/biomec Cinemática linear](https://image.slidesharecdn.com/aula4-cinematicalinear-090909073228-phpapp01/85/Aula-4-Cinematica-Linear-partes-1-e-2-1-320.jpg)
![Felipe P Carpes [email_address] www.ufsm.br/gepec/biomec Cinemática linear](https://image.slidesharecdn.com/aula4-cinematicalinear-090909073228-phpapp01/75/Aula-4-Cinematica-Linear-partes-1-e-2-1-2048.jpg)
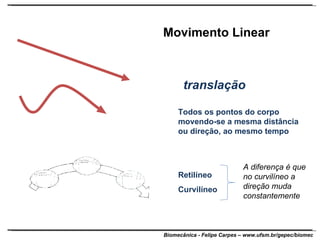
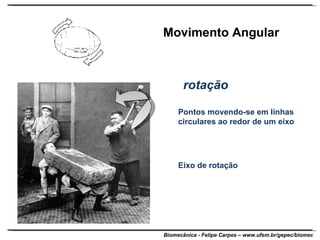
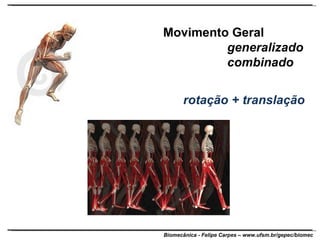
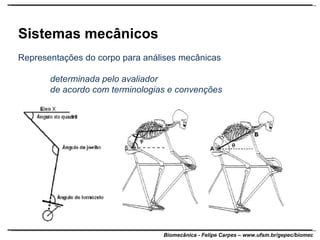
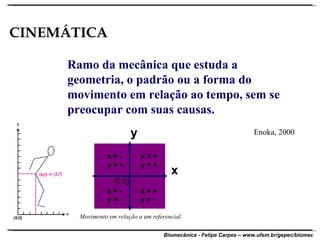
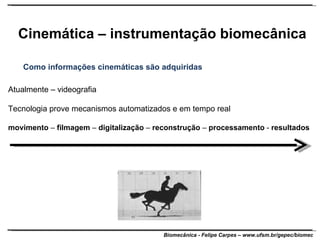
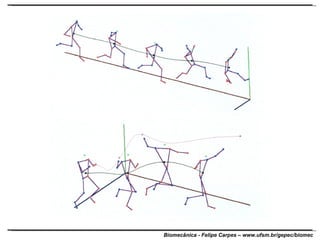
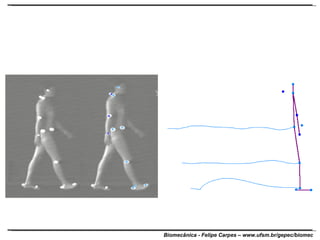

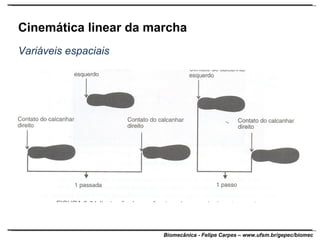
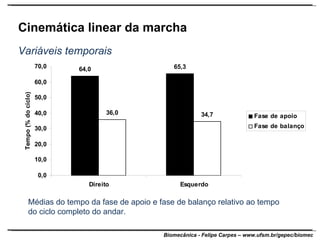
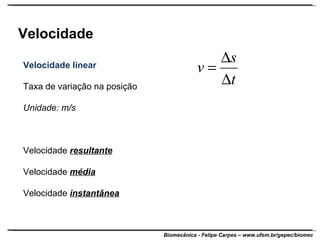
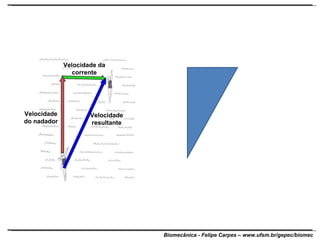

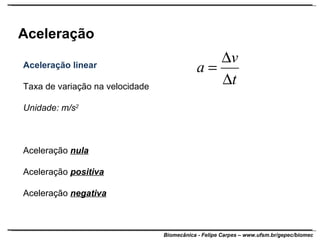
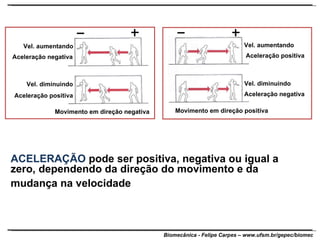
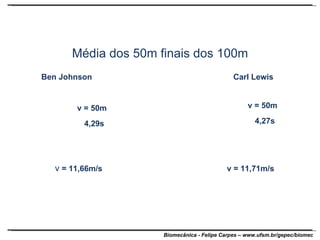
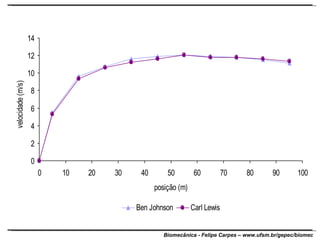

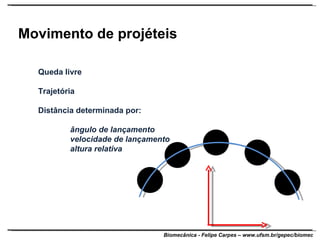
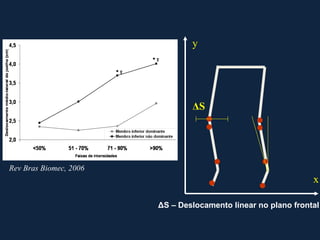
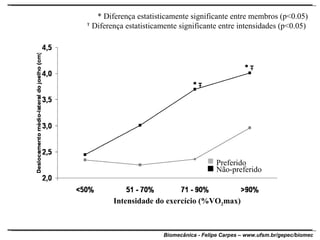
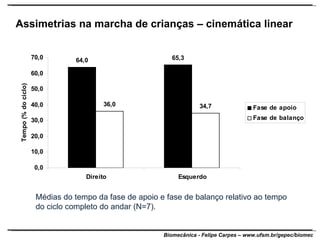
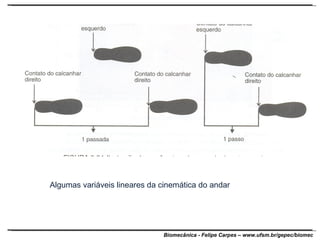

O documento apresenta os conceitos básicos de cinemática linear, descrevendo variáveis como deslocamento, velocidade e aceleração. Explica como essas variáveis são medidas e aplicadas na análise do movimento humano, com exemplos de estudos que analisaram a marcha e o ciclismo usando esses parâmetros cinemáticos.