Baixado 54 vezes












![3. Força de fricção ao movimento da corda:
Essa força pode ser modelada como sendo uma resistência da corda à
passagem da onda, utilizando o conceito de média, pode ser descrita como:
(Eq. 2.6)
Força _ Fricção ut ( x, t ).x
4. Força de restauração
Essa força pode ser entendida como uma força que tende a restaurar a corda
para a posição de equilíbrio, e pode ser escrita como:
Força _ Restauração u( x, t )x
(Eq. 2.7)
Observa-se que as forças com sinal negativo possuem o a direção contrária ao
movimento da corda, de forma a causar uma resistência à passagem da onda.
Substituindo as Equações (2.4 – 2.7) na Equação 2.2:
T [u x ( x x, t ) u x ( x, t )] F ( x, t )x ut ( x, t )x u( x, t )x utt x
(Eq. 2.8)
onde
é a densidade linear da corda. Dividindo ambos os lados da equação
2.8 por x , e fazendo x tender para zero, a Equação 2.8 pode ser escrita
como:
utt
1
Tu xx ut u F ( x, t )
(Eq. 2.9)
Desprezando as forças externas, e de atrito que atuam na corda, a Equação
2.9 fica escrita de uma forma mais simples:
utt 2u xx
(Eq. 2.10)
onde:
T
(Eq. 2.11)
13](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-14-320.jpg)







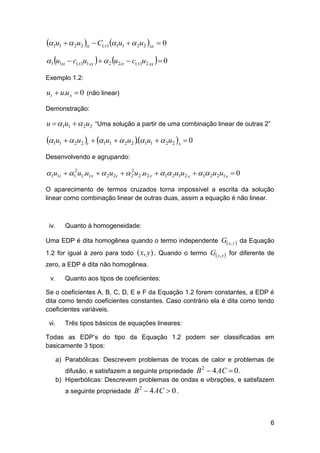
![as fronteiras A e B , mostradas no esquema, ou a substância será criada ou
destruída no interior do segmento S , em outras palavras:
N (Q)
N (Q)
t S
t
A
N (Q)
s ( x, t )
t B
(Eq. 3.3)
Onde s( x, t ) é definida como termo fonte de uma substância, sendo
considerada a taxa (variação no tempo) em que a substância Q é adicionada
ou retirada do meio S .
Figura 3.1: Segmento S delimitado pelo intervalo [a, b] do eixo-x.
Para se calcular o número de unidades da substância Q calcula-se a integral
da concentração nesse intervalo, assim:
N (Q)
d b
u ( x, t )dx
t S dt a
(Eq. 3.4)
logo a Equação 3.3 pode ser escrita como:
b
d b
u( x, t )dx F (a, t ) F (b, t ) s( x, t )dx
dt a
a
(Eq. 3.5)
A Equação 3.5 é conhecida como “Forma Integral da Lei da Conservação”, as
funções F (a, t ) e F (b, t ) possuem sinais contrários, pois a substância Q está
entrando na fronteira A , e saindo na fronteira B . Considerando as funções
u ( x, t ) e F ( x, t ) constantes e com primeiras derivadas constantes em todo o
domínio, e utilizando o teorema fundamental do cálculo, é possível escrever as
funções de fluxo da seguinte forma:
22](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-23-320.jpg)
![b
F (a, t ) F (b, t ) Fx ( x, t )dx
(Eq. 3.6)
a
assim a Equação 3.5 fica escrita como:
b
b
b
ut ( x, t )dx Fx ( x, t )dx s( x, t )dx
a
a
(Eq. 3.7)
a
então:
b
ut ( x, t ) Fx ( x, t ) s( x, t )dx 0
(Eq. 3.8)
a
o que implica que o resultado da integral deve ser sempre igual à zero em
qualquer intervalo [a, b] do domínio, ou seja:
ut Fx s
(Eq. 3.9)
A Equação 3.9 é conhecida como “Forma Diferencial da Lei da Conservação”,
também conhecida como lei fundamental da natureza. Apesar da Equação 3.9
ter um forte significado físico ela não consegue por si só modelar fenômenos
físicos, sendo necessárias equações constitutivas, que são relações entre
u ( x, t ) e F ( x, t ) . No caso de F ( x, t ) dependente de u ( x, t ) , e aplicando a
regra da cadeia, a Equação 3.9 pode ser escrita como:
ut F ' (u)u x s
(Eq. 3.10)
Exemplo 3.1:
ut cu x 0
c 0, constante
“Equação da Advecção”
(Eq. 3.11)
A Equação 3.11 escrita na forma da lei da conservação:
ut Fx 0
F ( x, t ) c.u ( x, t )
“Forma da Lei da Conservação”
(Eq. 3.12)
Exemplo 3.2:
ut uu x 0
“Equação de Burgers invíscida”
(Eq. 3.13)
A Equação 3.13 escrita na forma da lei da conservação:
23](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-24-320.jpg)













![dx
c(u )
dt
(Eq. 4.14)
x x0 c(u0 ( x0 )).t
(Eq. 4.15)
Derivando em relação à x :
1
d ( x0 ) d [c(u0 ( x0 ))]
t
dx
dx
(Eq. 4.16)
Utilizando a regra da cadeia:
1
d ( x0 ) d [c(u0 ( x0 ))] d ( x0 )
t
dx
dx0
dx
(Eq. 4.17)
1
d ( x0 ) d [c(u0 ( x0 ))]
1
t
dx
dx0
(Eq. 4.18)
Combinando as Equações 4.13 e 4.18:
d (u0 ( x0 ))
dx0
d (u ( x, t ))
d [c(u0 ( x0 ))]
dx
1 t.
dx0
(Eq. 4.19)
Analisando a Expressão 4.19, a derivada de u ( x, t ) em relação à x tende ao
infinito quando o denominador da expressão for igual ao zero, assim o tempo
de queda é calculado escolhendo o menor tempo onde:
1 tb .
d [c(uo ( x0 ))]
0
dx0
(Eq. 4.20)
Ou seja:
tb
1
d [c(uo ( x0 ))]
dx0
(Eq. 4.21)
Para se encontrar o tempo de quebra deve se encontrar o maior valor negativo
do denominador da Equação 4.21.
37](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-38-320.jpg)
![Exemplo 4.3:
Encontrar o tempo de queda do seguinte problema de Cauchy:
ut uu x 0
2 , com
u ( x,0) e x
x R
t 0
(Eq. 4.22)
Solução:
A Equação 4.22 é análoga a Equação 4.8, com:
c(u0 ( x0 )) e x0
2
(Eq. 4.23)
Assim:
2
d [c(u0 ( x0 ))]
2e x0 .x0
dx0
(Eq. 4.23)
Essa função terá valor máximo quando a derivada for igual ao zero, ou seja:
d 2 [c(u0 ( x0 ))]
dx0
2
0
(Eq. 4.24)
2 e x0 2e x0 x0 0
2
2
2
1
2
x0
(Eq. 4.25)
(Eq. 4.26)
Para valores negativos de x0 a Equação 4.23 se torna positiva, e o tempo de
queda se torna negativo. Utilizando a Equação 4.21:
tb
1
d [c(uo ( x0 ))]
dx0
(Eq. 4.27)
Substituindo a parte positiva da Equação 4.26, encontra-se um tempo de queda
igual a:
tb
e
2
(Eq. 4.28)
De fato esse valor vale aproximadamente tb 1.2 , fato que foi comprovado
graficamente na Figura 4.1.
38](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-39-320.jpg)
![Exemplo 4.4:
Encontrar o tempo de queda do seguinte problema de Cauchy, e confirmar o
valor graficamente plotando as características do problema:
ut u 2u x 0
1 , com
u ( x,0)
1 x2
x R
t 0
(Eq. 4.29)
Solução:
A Equação 4.29 é análoga a Equação 4.8, com:
c(u0 ( x0 ))
1
(Eq. 4.30)
(1 x0 ) 2
2
Assim:
d [c(u0 ( x0 ))]
4 x0
2
dx0
1 x0
(Eq. 4.31)
3
Essa função terá valores máximos em pontos de descontinuidade, assim:
d 2 [c(u0 ( x0 ))]
dx0
2
4 1 x0
0
(Eq. 4.32)
24 x 1 x
1 x
2 3
2 2
2
0
2 6
0
0
(Eq. 4.33)
0
Ou seja:
x0
1
5
(Eq. 4.34)
Para valores negativos de x0 a Equação 4.34 se torna positiva, e o tempo de
queda se torna negativo. Utilizando a Equação 4.21:
tb
1
d [c(uo ( x0 ))]
dx0
(Eq. 4.35)
Substituindo a parte positiva da Equação 4.34 na Equação 4.35, encontra-se
um tempo de queda igual a:
39](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-40-320.jpg)



![A construção da solução resolvendo-se a equação da continuidade na forma
diferencial utilizando o método das características é interrompida a partir do
tempo de queda, porém o processo físico é um processo contínuo no tempo,
não havendo paradas, assim devemos voltar à lei de conservação na forma
diferencial, com termo fonte nulo, dada por:
d b
u( x, t )dx F (a, t ) F (b, t )
dt a
(Eq. 4.39)
Considerando o conceito de solução suave, o domínio agora é segmentado em
duas regiões dividas por uma curva ( xs (t ), t ) , como mostrado na Figura
s
4.10, a Equação 4.39 pode ser escrita como:
b
d xs (t )
u ( x, t )dx u ( x, t )dx F (a, t ) F (b, t )
dt a
xs ( t )
(Eq. 4.40)
Figura 4.10: Domínio da solução segmentado em dois domínios.
Desenvolvendo o lado esquerdo da equação:
b
xs (t ) d
d
u ( x(t ), t )dx
u ( x(t ), t )dx F (a, t ) F (b, t )
a dt
xs ( t ) dt
(Eq. 4.41)
Utilizando a regra da cadeia para se resolver a derivada, e integral por partes
para se resolver a integral:
xs ( t )
a
xs (t )
d
d [u ( x(t ), t )] d [u ( x(t ), t )] dx(t )
u ( x(t ), t )dx
dx
dt
dt
dx
dt
a
(Eq. 4.42)
43](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-44-320.jpg)
![
xs ( t )
a
xs ( t )
a
xs ( t )
xs ( t )
d
d [u ( x(t ), t )] dx(t )
u ( x(t ), t )dx ut ( x, t )dx
dx
dt
dx
dt
a
a
(Eq. 4.43)
xs ( t )
dxs xs (t )
d
d 2 x(t )
u ( x(t ), t )dx ut ( x, t )dx u ( xs , t )
u ( x, t ).
dx
dt
dt
dtdx
a
a
(Eq. 4.44)
Como x(t ) depende apenas de t , a Equação 4.44 pode ser escrita como:
xs ( t )
a
xs ( t )
dx
d
u ( x(t ), t )dx ut ( x, t )dx u ( xs , t ) s
dt
dt
a
(Eq. 4.45)
Analogamente para o segundo termo do lado esquerda da Equação 4.41:
b
b
dxs
d
dt u( x(t ),t )dx ut ( x, t )dx u( xs , t ) dt
xs ( t )
xs ( t )
(Eq. 4.46)
Substituindo as Equações 4.45 e 4.46 na Equação 4.41:
xs ( t )
ut ( x, t )dx u( xs , t )
a
b
dxs
dx
ut ( x, t )dx u ( xs , t ) s F (a, t ) F (b, t )
dt xs (t )
dt
(Eq. 4.47)
Fazendo a xs e b xs , a Equação 4.47 pode ser escrita como:
u ( xs , t )
dxs
dx
u ( xs , t ) s F ( xs , t ) F ( xs , t )
dt
dt
(Eq. 4.48)
Que pode ser escrita da seguinte forma:
dxs F ( xs , t ) F ( xs , t )
dt
u ( xs , t ) u ( xs , t )
(Eq. 4.49)
De acordo com a equação deduzida, uma solução suave por partes que
satisfaz a lei de conservação na forma integral deve satisfazer a Equação 4.49.
Essa equação é também chamada de condição de Rankine-Hugoniot, que
pode ser escrita utilizando-se a notação de função salto, dada por:
dxs [ F ]
dt [u ]
“Condição de Rankine-Hugoniot”
(Eq. 4.50)
44](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-45-320.jpg)
![Para se encontrar precisamente essa curva, necessita-se de um dado inicial,
para isso se utiliza o tempo de queda descrito na Tópico 4.1, assim, encontrar
a função que descreve a curva ( x, t ) é o mesmo que se resolver a seguinte
s
equação:
dxs [ F ]
( xs , t ) dt [u ]
x (t ) x
b
s b
s
(Eq. 4.51)
Sendo o ponto ( xb , tb ) o ponto onde ocorre a catástrofe de gradiente pela
primeira vez.
Definição:
Dada uma função u ( x, t ) , que seja solução suave de ut Fx 0 , satisfazendo
a condição de Rankine-Hugoniot, essa solução é dita “ondas de choque”, e a
função salto ( x, t ) que divide o domínio em duas partes é dita “caminho de
s
choque”.
Exemplo 4.5:
Resolver o seguinte problema de valor inicial:
ut uu x 0
1,
u ( x,0) 0,
x0
(Eq. 4.52)
x0
Solução:
1° Passo: Construção das características:
dx
u
dt
(Eq. 4.53)
Como a Equação 4.52 é homogênea, as características são dadas da seguinte
forma:
x x0 C (u0 ( x0 )).t
(Eq. 4.54)
Ou seja:
45](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-46-320.jpg)

![ dxs [ F ]
( xs , t ) dt [u ]
x (t ) x
b
s b
s
(Eq. 4.59)
A função fluxo pode ser encontrada utilizando-se a seguinte definição:
Fx u.u x
(Eq. 4.60)
Integrando a Equação 4.60 em relação a variável x , tem-se:
u2
F
2
(Eq. 4.61)
Assim, a Equação 4.59 pode ser escrita como:
2
2
dxs 1 u u
s ( xs , t ) dt 2 u u
x (0) 0
s
(Eq. 4.62)
De acordo com a Equação 4.58 u 0 e u 1 , assim:
dxs 1
s ( xs , t ) dt 2
xs (0) 0
xs
t
2
(Eq. 4.63)
(Eq. 4.64)
A Figura 4.12 mostra as características plotadas considerando a curva de
caminho de choque dada pela Equação 4.64, assim a solução final pode ser
escrita como:
1,
u ( x, t )
0,
t
2
t
x
2
x
(Eq. 4.65)
A Figura 4.13 mostra a Solução 4.65 plotada para diferentes tempos. É
possível observar que a frente de choque se move com velocidade igual a 0.5 .
47](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-48-320.jpg)


![2,
u ( x, t )
1,
x R
(Eq. 4.69)
x R
Portando, para se encontrar as regiões R e R , deve-se encontrar a curva de
caminho de choque. Assim:
dxs [ F ]
s ( xs , t ) dt [u ]
x (t ) x
b
s b
(Eq. 4.70)
A função fluxo pode ser encontrada utilizando-se a seguinte definição:
Fx u 2 .u x
(Eq. 4.71)
Integrando a Equação 4.60 em relação a variável x , tem-se:
F
u3
3
(Eq. 4.72)
Assim, a Equação 4.59 pode ser escrita como:
3
3
dxs 1 u u
s ( xs , t ) dt 3 u u
x (0) 1
s
(Eq. 4.73)
De acordo com a Equação 4.69 u 1 e u 2 , assim:
dxs 7
( xs , t ) dt 3
xs (0) 1
s
xs
7t
1
3
(Eq. 4.74)
(Eq. 4.75)
A Figura 4.15 mostra as características plotadas considerando a curva de
caminho de choque dada pela Equação 4.75, assim a solução final pode ser
escrita como:
50](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-51-320.jpg)




![A Figura 5.4 mostra as características da Equação 5.7. Agora o problema se
tornou se encontrar uma função g ( x, t ) que possua características contínuas e
que seja solução da Equação 5.1. De acordo com a Figura 5.4 a inclinação das
características muda na zona de rarefação, o que indica que a função g ( x, t )
possua a seguinte forma:
x
g ( x, t ) g
t
(Eq. 5.8)
Figura 5.4: Características da Equação 5.7.
Assim, como a função g ( x, t ) deve ser solução da Equação 5.1:
d [ g ( x, t )]
d [ g ( x, t )]
g ( x, t )
0
dt
dx
(Eq. 5.9)
x x
x x 1
g ' 2 g g ' 0
t t
t t t
(Eq. 5.10)
x x 1 x
g ' g 2 0
t t t t
(Eq. 5.11)
55](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-56-320.jpg)
![A Equação 5.11 admite duas soluções:
g ( x, t ) constante
(Eq. 5.12-a)
x
t
(Eq. 5.12-b)
g ( x, t )
Para se decidir qual solução melhor representa o Problema 5.1, deve-se
analisar a condição de Rankine-Hugoniot nas duas soluções, assim:
1ª: Solução 5.12-a:
0,
u ( x , t ) a ,
1,
x0
0 x t , onde
a constante
(Eq. 5.13)
xt
Aplicando a condição de Rankine-Hugoniot nas descontinuidades da função:
dxs [ F ] 1 (u ) 2 (u ) 2
dt [u ] 2 u u
(Eq. 5.14)
dxs
dt
(Eq. 5.15)
xs 0
a
0
2
Ou seja, a 0 .
dxs
dt
xs t
a 1
1
2
(Eq. 5.16)
Ou seja, a 1 .
Como a constante a tem que assumir dois valores diferentes, a Equação 5.13
não obedece à condição de Rankine-Hugoniot.
2ª: Solução 5.12-b:
0,
x
u ( x, t ) ,
t
1,
x0
0 xt
(Eq. 5.17)
xt
Aplicando a condição de Rankine-Hugoniot nas descontinuidades da função:
56](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-57-320.jpg)
![dxs [ F ] 1 (u ) 2 (u ) 2
dt [u ] 2 u u
(Eq. 5.18)
dxs
dt
(Eq. 5.19)
dxs
dt
xs 0
xs t
x
0
2t
x
1
t
1
2
(Eq. 5.20)
Fazendo x 0 na Equação 5.19, e x t na Equação 5.20, observa-se que
a Equação 5.17 obedece à condição de Rankine-Hugoniot, sendo considerada
a solução da Equação 5.1.
A Figura 5.5 mostra a solução dada pela Equação 5.17 plotada para diferentes
tempos. Observa-se a presença de uma onda de avanço da solução, chamada
de onda de rarefação.
Figura 5.5: Solução da Equação 5.1, para diferentes valores de tempo.
5.2 – Solução geral de equações homogêneas com áreas de rarefação
No Tópico 5.1 foi construída uma solução do tipo ondas de rarefação para
resolver o Exemplo 5.1. Nesse tópico irá ser construída uma solução geral que
pode ser aplicada em todos os casos. Assim será construída a solução do
seguinte problema de Cauchy:
ut C (u )u x 0
u ,
xa
u ( x,0)
u ,
xa
(Eq. 5.21)
57](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-58-320.jpg)
![Solução:
Utilizando o fato da Equação 5.21 ser homogênea, as características são
dadas da seguinte forma:
x x0 c(u( x0 )).t
x0 c(u (u )).t ,
x
x0 c(u (u )).t ,
(Eq. 5.22)
xa
xa
(Eq. 5.23)
De acordo com a Equação 5.23 as características são retas, plotadas na Figura
5.6.
Figura 5.6: Características da Equação 5.21.
Da mesma forma que o Exemplo 5.1, a solução da Equação 5.21 pode ser
aproximada da seguinte forma:
u ,
x [a c(u (u )).t ]
u ( x, t ) g ( x, t ), [a c(u (u )).t ] x [a c(u (u )).t ]
x [a c(u (u )).t ]
u ,
(Eq. 5.24)
De acordo com a Figura 5.6 a inclinação das características muda na zona de
rarefação, o que indica que a função g ( x, t ) possua a seguinte forma da
Equação 5.8, porém deslocada de uma constante a , ou seja:
58](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-59-320.jpg)
![ xa
g ( x, t ) g
t
(Eq. 5.25)
Assim, calculando as derivadas parciais da função g ( x, t ) através da regra da
cadeia:
d [ g ( x, t )]
( x a)
g ' ( x, t ). 2
dt
t
(Eq. 5.26)
d [ g ( x, t )]
1
g ' ( x, t ).
dx
t
(Eq. 5.27)
Substituindo as Equações 5.26 e 5.27, na Equação 5.21:
( x a)
1
g ' ( x, t ). 2 C ( g ( x, t )).g ' ( x, t ). 0
t
t
(Eq. 5.28)
1 ( x a)
g ' ( x, t ) C ( g ( x, t )). 2 0
t t
(Eq. 5.29)
Da mesma forma que na Equação 5.11, a Equação 5.29 possui duas soluções
distintas, assim verificando a condição de Rankine-Hugoniot nas duas
condições, chega-se a conclusão que a solução fisicamente coerente da
Equação 5.29 é dada por:
1 ( x a)
C ( g ( x, t )). 2 0
t t
(Eq. 5.30)
( x a)
C ( g ( x, t ))
t
(Eq. 5.31)
Por isso, a função g ( x, t ) é dada da seguinte forma:
( x a)
g ( x, t ) C 1
t
(Eq. 5.32)
Logo, a solução da Equação 5.21 é dada por:
59](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-60-320.jpg)
![u ,
x [a c(u (u )).t ]
( x a)
u ( x, t ) C 1
, [a c(u (u )).t ] x [a c(u (u )).t ]
t
u ,
x [a c(u (u )).t ]
(Eq. 5.33)
Exemplo 5.2:
Resolver o seguinte problema de Cauchy:
ut u 3u x 0
x 1
1,
u ( x,0) 2,
x 1
(Eq. 5.34)
Solução:
1º Passo: Construção das características:
Como a Equação 5.34 é homogênea, as características são dadas da seguinte
forma:
x x0 c(u( x0 )).t
(Eq. 5.35)
x0 t ,
x
x0 8t ,
(Eq. 5.36)
x 1
x 1
As características do problema estão plotadas na Figura 5.7. É possível
perceber uma zona de rarefação que começa no ponto ( xb , tb ) (1,0) .
Figura 5.7: Características do Exemplo 5.2.
60](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-61-320.jpg)
![2° Passo: Construção da solução
A solução do tipo onda de rarefação pode ser escrita utilizando-se a Equação
5.33, dessa forma:
x [1 t ]
1,
( x 1)
u ( x, t ) C 1
, [1 t ] x [1 8t ]
t
2,
x [1 8t ]
(Eq. 5.37)
Nesse problema a função C (u ) é dada da seguinte forma:
C (u ) u 3
(Eq. 5.38)
Dessa forma, a solução da Equação 5.24 é dada por:
x [1 t ]
1,
( x 1)
u ( x, t ) 3
, [1 t ] x [1 8t ]
t
2,
x [1 8t ]
(Eq. 5.39)
A Figura 5.8 mostra a solução dada pela Equação 5.39 plotada para diferentes
tempos.
Figura 5.8: Solução do Exemplo 5.2 plotadas em diferentes tempos.
61](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-62-320.jpg)







































![u ( x, t )
nct
nct nx
Bn cos
sen
L
L L
An sen
n 1
(Eq. 9.28)
Os coeficientes An e Bn são determinados a partir das condições iniciais do
problema:
u ( x,0) u0 ( x)
ut ( x,0) u1 ( x)
(Eq. 9.29)
nx
Bn sen L u0 ( x)
n 1
A nc sen nx u ( x)
1
n 1 n L
L
(Eq. 9.30)
Foi demonstrado no Apêndice 3 a ortogonalidade das funções tipo seno e
cosseno, assim, multiplicando os dois lados da equação pela função seno:
mx
nx
mx
sen L Bn sen L u0 ( x) sen L
n 1
sen mx A nc sen nx u ( x) sen mx
1
L n 1 n L
L
L
(Eq. 9.31)
Como o sistema é completo e contínuo no intervalo x [0, L] , a multiplicação
pode ser incluída no operador somatório, dessa forma:
nx mx
mx
Bn sen L sen L u0 ( x) sen L
n 1
A nc sen nx sen mx u ( x) sen mx
1
n 1 n L
L L
L
(Eq. 9.32)
Integrando no intervalo x [0, L] , e incluindo o operador integral no operador
somatório:
L
L
nx mx
mx
sen
dx u0 ( x) sen
dx
Bn sen
L L 0
L
n 1 0
L
L
nc
nx mx
mx
An L sen L sen L dx u1 ( x) sen L dx
0
n 1 0
(Eq. 9.33)
103](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-104-320.jpg)


![Bn
4
n 3
1 cosn
(Eq. 9.47)
Rescrevendo a função cosseno:
Bn
4
n
1 (1)
n
3
(Eq. 9.48)
Dessa forma, a solução do problema é escrita como:
u ( x, t )
u ( x, t )
nct
nct nx
Bn cos
sen
L
L L
An sen
n 1
4
1 (1) n cos 2nt sen nx
3
n 1 n
(Eq. 9.49)
(Eq. 9.50)
A Figura 9.2 mostra a solução do Exemplo 9.1 plotado para diferentes valores
de tempo, e utilizando nove termos da série de Fourier. É possível ver a
vibração da corda com o avanço do tempo.
Figura 9.2: Solução do Exemplo 9.1, dada pela Equação 9.50.
Exemplo 9.2:
Resolver o seguinte problema de propagação de ondas em meios finitos:
utt 9u xx
x
, x [0,2]
u ( x,0) 2
x 3, x (2,3] ,
ut ( x,0) 0
u (0, t ) u (3, t ) 0
x (0,3)
t 0
(Eq. 9.51)
106](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-107-320.jpg)














![utt c 2u xx
u ( x,0) 0
I
, x [ x0 , x0 ] ,
ut ( x,0) 2
0, x [ x , x ]
0
0
u (0, t ) u ( L, t ) 0
x (0, L)
t 0
(Eq. 10.3)
A solução do problema é dada pela Equação 9.36, repetida aqui por
conveniência:
nct
nct nx
u ( x, t ) An sen
Bn cos
sen
L
L L
n 1
2 L
nx
An
u1sen L dx
nc 0
L
Bn 2 u0 sen nx dx
L0
L
(Eq. 10.4)
Calculando os coeficientes An e Bn :
2L
nx
Bn 0.sen
dx 0
L0
L
(Eq. 10.5)
2 L
nx
An
u1sen L dx
nc 0
(Eq. 10.6)
x
2 0
I
nx
An
2 sen L dx
nc x
(Eq. 10.7)
0
x0
I
nx L
An
cos L n
nc
x
An
(Eq. 10.8)
0
nx0 n
sen
sen
2
L L
n c
2 IL
(Eq. 10.9)
Substituindo na Equação 10.4:
121](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-122-320.jpg)

![Figura 10.3: Esboço do problema do martelo com a cabeça pontiaguda.
A equação que governa esse problema levará em consideração uma função do
tipo delta de Dirac, porém a solução pode ser encontrada com base na solução
do tipo cabeça quadrada, considerando que a largura do martelo tende à zero.
Dessa forma, marcando a Equação 10.11 como u ( x, t ) , a solução é dada
por:
u ( x, t ) lim [u ( x, t )]
(Eq. 10.13)
0
Aplicando a propriedade da soma do limite, podemos introduzir o limite dentro
do operador somatório, assim:
u ( x, t )
2 IL
1
nx0 nct nx
n
sen
sen
sen
lim sen
2
L
L L L 0
n 1 n c
(Eq. 10.14)
Esse limite é conhecido como limite fundamental trigonométrico, e possui valor
igual a um, assim:
u ( x, t )
u ( x, t )
2 IL
nx0 nct nx n
sen
sen
sen
n 2 c L L L L
n 1
2I
nx0 nct nx
sen
sen
L L L
nc sen
n 1
(Eq. 10.15)
(Eq. 10.16)
123](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-124-320.jpg)









![Tn (t ) An sen ( ct ) Bn cos( ct )
(Eq. 10.74)
nct
nct
Tn (t ) An sen
Bn cos
, n 0,1,2...
L
L
(Eq. 10.75)
Substituindo as Equações 10.72 e 10.75, na Equação 10.47:
nct
nct nx
u n ( x, t ) An sen
Bn cos
cos
, n 0,1,2... (Eq. 10.76)
L
L L
Como a equação da onda é linear, solução geral é dada pela soma de todas as
soluções parciais, assim:
u ( x, t )
nct
nct nx
Bn cos
cos
L
L L
An sen
n0
(Eq. 10.77)
Observa-se que uma mudança no tipo de condição de contorno do problema
mudou a forma da solução dada pela série de Fourier, e mudou o índice do
operador somatório. Os coeficientes An e Bn são determinados a partir das
condições iniciais do problema:
u ( x,0) u0 ( x)
ut ( x,0) u1 ( x)
(Eq. 10.78)
nx
Bn cos L u0 ( x)
n 0
A nc cos nx u ( x)
1
n 0 n L
L
(Eq. 10.79)
Foi demonstrado no Apêndice 3, a ortogonalidade das funções tipo seno e
cosseno, assim, multiplicando os dois lados da equação pela função cosseno:
mx
nx
mx
cos L Bn cos L u0 ( x)cos L
n 0
cos mx A nc cos nx u ( x)cos mx
1
L n 0 n L
L
L
(Eq. 10.80)
Como o sistema é completo e contínuo no intervalo x [0, L] , a multiplicação
pode ser incluída no operador somatório, dessa forma, integrando no intervalo
dado:
133](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-134-320.jpg)




![2
Tn (t ) An
n
t
L
e
, n 1,2,3,....
(Eq. 11.22)
Dessa forma a Solução 11.13 fica escrita como:
2
u1n ( x, t )
n
nx L t
An sen
e ,
L
n 1,2,3,....
(Eq. 11.23)
Como a Equação 11.11 é linear, sua solução é dada por combinação linear de
outras soluções, assim:
2
u1 ( x, t )
An
n
nx L t
sen
e
n 1
L
(Eq. 11.24)
A Equação 11.24 é a solução da Equação 11.11, o coeficiente An pode ser
encontrado utilizando-se a condição inicial, assim:
u1 ( x,0) u0 ( x)
nx
L
An sen
n 1
(Eq. 11.25)
Utilizando o princípio de ortogonalidade desenvolvido no Apêndice 3:
mx
mx
nx
sen
u0 ( x) sen
An sen
L
L n 1
L
(Eq. 11.26)
Como o sistema é completo e contínuo no intervalo x [0, L] , a multiplicação
pode ser incluída no operador somatório, dessa forma, integrando no intervalo
dado:
mx
nx mx
sen L u0 ( x)dx An sen L sen L dx
n 10
0
L
L
(Eq. 11.27)
O resultado da integral do lado direito foi deduzido no Apêndice 3, assim o
coeficiente An é dado por:
2 L nx
An sen
u0 ( x)dx
L0 L
(Eq. 11.28)
Por isso, a solução final do Problema 11.11 é dado por:
138](https://image.slidesharecdn.com/apostilaelementosdematemticaaplicada-140306094519-phpapp01/85/Apostila-elementos-de-matematica-aplicada-139-320.jpg)



















O documento é uma compilação de conceitos e soluções relacionados a equações diferenciais parciais (EDPs), elaborado por Wagner Queiroz Barros a partir de notas do professor Viatcheslav Ivanovich Priimenko. Ele aborda definições, classificações e soluções de EDPs, além de tópicos como a equação da onda, leis de conservação e problemas de propagação de ondas. O texto inclui exemplos práticos e referências bibliográficas relevantes.





































![Aula_1_-_Introdução_às_Equações_diferenciais_220816_085517[1].pdf](https://cdn.slidesharecdn.com/ss_thumbnails/aula1-introduosequaesdiferenciais2208160855171-220907184027-b4a7afd6-thumbnail.jpg?width=640&height=640&fit=bounds)





