Baixado 44 vezes

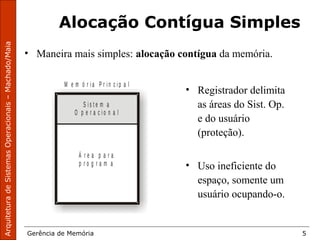
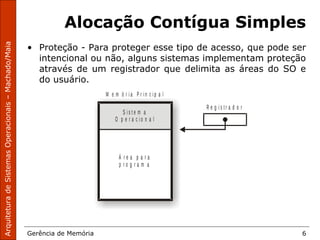
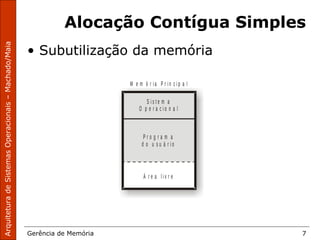
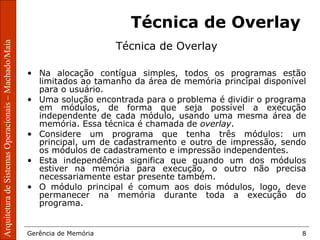
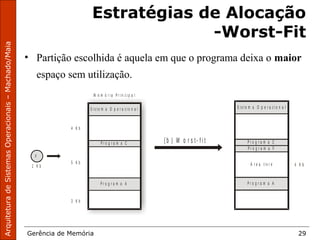
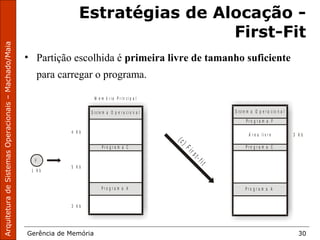

1) O documento discute técnicas de gerenciamento de memória em sistemas operacionais, incluindo alocação contígua, overlay, alocação particionada estática e dinâmica. 2) A alocação particionada estática divide a memória em partições fixas, enquanto a dinâmica permite que cada processo use apenas o espaço necessário, eliminando a fragmentação interna. 3) As técnicas buscam maximizar o uso da memória e manter o maior número possível de processos na memória principal.