Transferir como PDF, PPTX
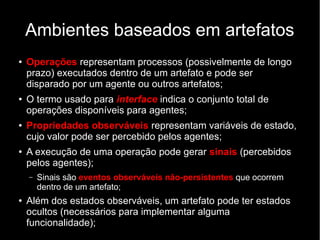


![Agent Owner
/* Initial beliefs and rules */
/* Initial goals */
!create.
/* Plans */
+!create : true <-
?setupBingo (ID).
+?setupBingo (C) : true <-
makeArtifact("b0", "tablet.Bingo", [], C);
focus(C).
-?setuBingo(C) : true <-
wait(10);
?setupBing(ID).
//Perceptions
//Signal status
+status(S) : S == "ready" <-
start.](https://image.slidesharecdn.com/ambientes-130523102224-phpapp02/85/Ambientes-em-Sistemas-Multi-agentes-59-320.jpg)

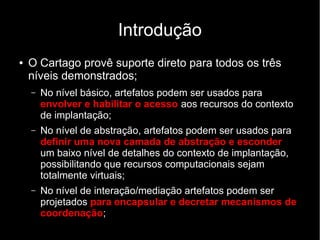
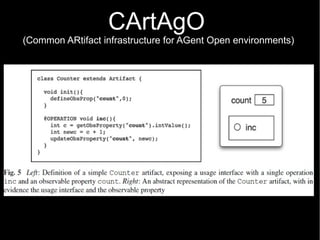
O documento discute a programação de ambientes em sistemas multi-agentes. Ele introduz os conceitos de ambientes na inteligência artificial e engenharia de software orientada a agentes. Também descreve modelos de programação de ambientes, incluindo modelos de ação, percepção, computação, dados e distribuição de ambientes. O documento fornece uma fundamentação teórica para a programação de ambientes em sistemas multi-agentes.