Transferir como PDF, PPTX








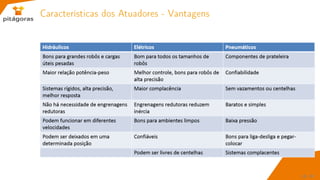
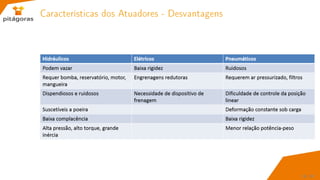

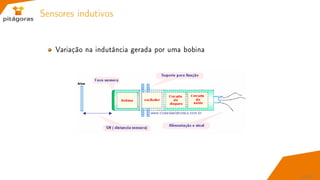
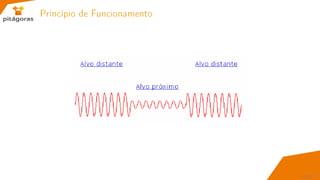


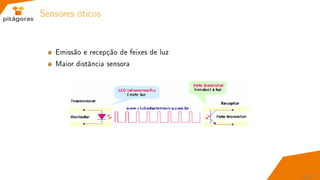
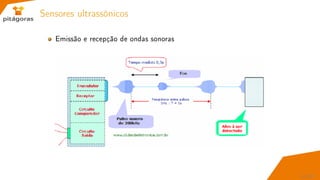

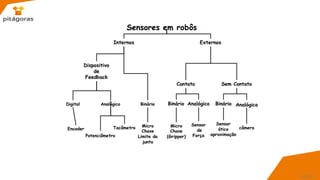






Este documento fornece uma introdução sobre atuadores e sensores para robótica, descrevendo os principais tipos de atuadores (hidráulicos, pneumáticos e elétricos) e sensores (mecânicos, magnéticos, capacitivos, ópticos e ultrassônicos). Também discute aspectos como características, vantagens e desvantagens de cada tipo, além de apresentar exemplos como motores CA x CC, encoders e scanners a laser.


































































![metodologias-ativas-de-aprendizagem.pptx_(1)[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/metodologias-ativas-de-aprendizagem-260204140054-ff555186-thumbnail.jpg?width=640&height=640&fit=bounds)






