Este documento descreve os principais tipos de sensores e seus circuitos de processamento. Na Seção 1, ele discute sensores de temperatura, foto sensores, sensores de rotação, vibração, gás, umidade, pressão, proximidade e efeito Hall. A Seção 2 cobre circuitos com amplificadores operacionais, circuitos ponte e conversores A/D e D/A. A Seção 3 apresenta o sistema de treinamento em sensores ED-6800B. A Seção 4 fornece experimentos práticos com esses sensores.

















![(a) (b)
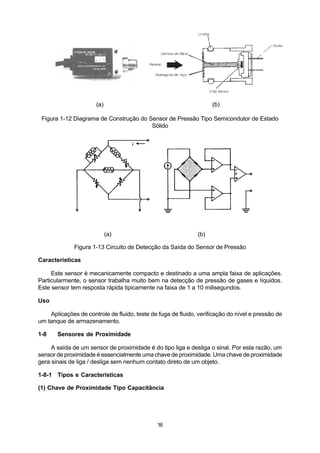
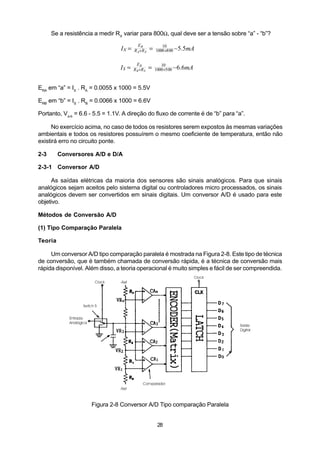
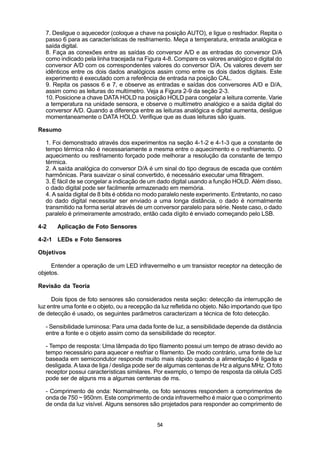
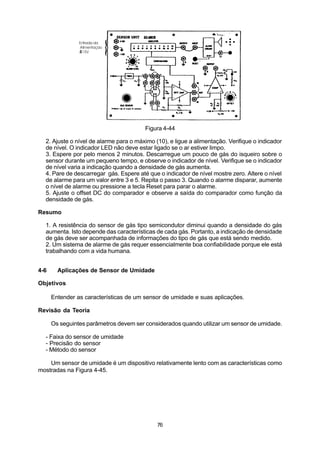
Figura 2-4 Circuitos com Offset Ajustável
2-1-3 Amplificador Diferencial
Como o nome indica, um amplificador diferencial amplifica somente a diferença entre as
duas entradas (inversora e não inversora). Portanto, quando ambos os sinais de entrada são
aumentados ou diminuídos na mesma direção, a saída do amplificador diferencial mantém-se
a mesma. Os amplificadores diferenciais são críticos na detecção de sinais de fuga na presença
de ruído ou outros sinais de interferência que aparecem em ambas as entradas. Um amplificador
diferencial típico é mostrado na Figura 2-5.
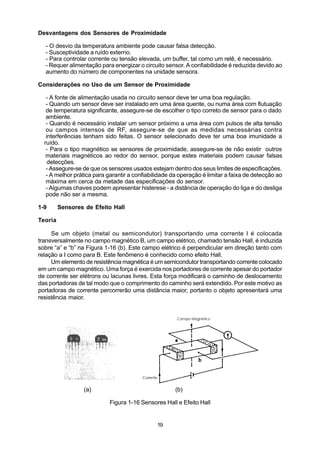
Figura 2-5 Amplificador Diferencial
O sinal de entrada é aplicado às entradas inversora e não inversora. O amplificador
diferencial pode ser analisado observando uma entrada de cada vez. Quando o ponto V2’ é
aterrado e a entrada V2 está em zero, o amplificador é essencialmente o mesmo da Figura 2-
1 (b). A saída do amplificador nestas condições é:
R
V 0 = −[ RV ]V1 ........................................................................
1
A seguir, remova o aterramento de V2’ e curto-circuite a entrada V1 para configurar o
amplificador não inversor. A entrada real do terminal de entrada não inversor é:
R
V Â2 = [ R2 +R3 ]V 2 ......................................................................
3
25](https://image.slidesharecdn.com/labdeinstrumentacaominipa-111004152938-phpapp01/85/Lab-26-320.jpg)
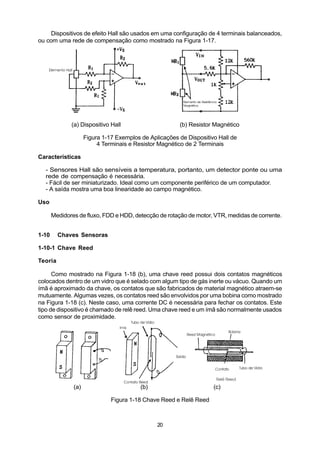
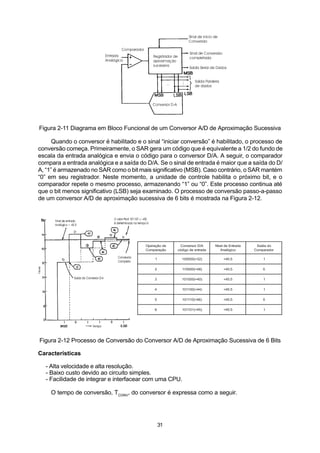
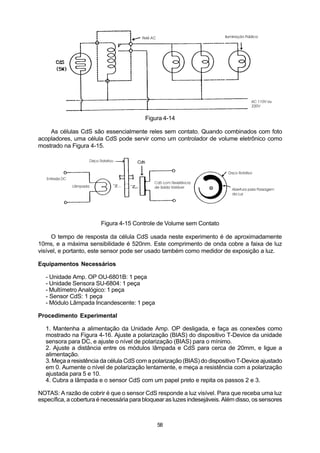
![Portanto, a saída não inversora é:
RF RF R3
V 0 = [1 + R 1 ]V 2
 = [1 + R1 ][ R2 +R 3 ]V2 ...................................
Combinando as equações 2-1 e 2-3, a saída do amplificador diferencial torna-se:
R RF R3
V 0 = −[ RF ]V1 + [1 +
1 R1 ][ R2 +R 3 ]V 2.......................................
A equação 2-4 pode ser simplificada quando R1, R2, R3 e RF são idênticos (ganho 1).
V 0 = V2 − V1 .........................................................................
Este resultado indica claramente que a saída do amplificador diferencial é a diferença
entre as duas entradas. O amplificador diferencial de ganho unitário pode ser considerado
como um subtrator analógico.
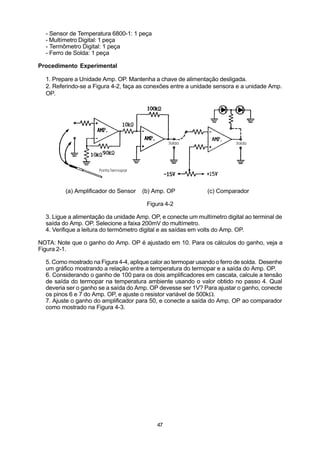
2-1-4 Comparador
Um circuito comparador de tensão compara os valores de duas tensões de entrada e
produz uma saída que indica a amplitude relativa das duas entradas. A indicação dos resultados
pode ser expressa em níveis lógicos 0 ou 1.
Comparadores usando Amp. OP são mostrados na Figura 2-6.
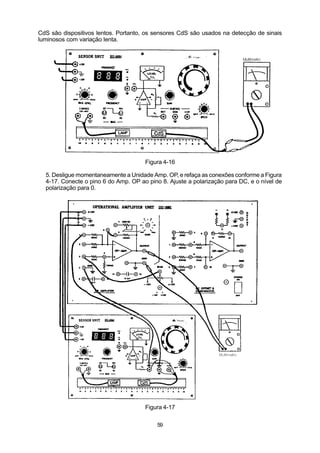
(a) (b) (c)
Figura 2-6 Circuitos Comparadores
Na Figura 2-6 (a), quando a entrada é maior que o sinal de referência, a saída irá para +
Vsat, ou ficará próxima da tensão + de alimentação. De modo oposto, quando a entrada é
menor que a referência, a saída irá para -Vsat, ou ficará próxima da tensão - de alimentação. A
polaridade da saída do circuito na Figura 2-6 (b) será o oposto do circuito da Figura 2-6 (a).
A saída do Amp. OP na Figura 2-6 (c) alimenta um diodo zener. Portanto, a saída do zener
representa o resultado da comparação. Este tipo de circuito é vantajoso quando a saída do
comparador faz interface com um circuito TTL. A tensão +Vs na circuito é +5V na aplicação
TTL.
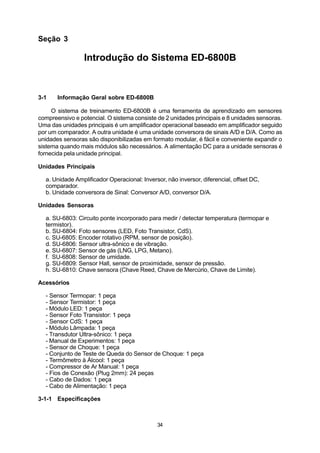
2-2 Circuitos Ponte
Um circuito ponte faz uso da técnica baseada no estado balanceado e não balanceado da
ponte. Um circuito ponte é mostrado na Figura 2-7.
26](https://image.slidesharecdn.com/labdeinstrumentacaominipa-111004152938-phpapp01/85/Lab-27-320.jpg)





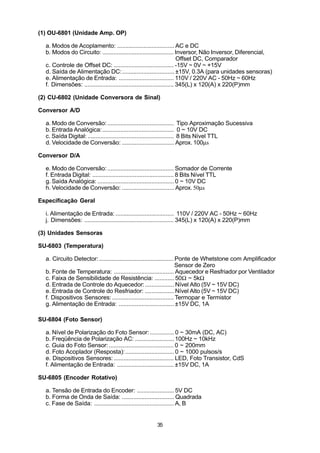

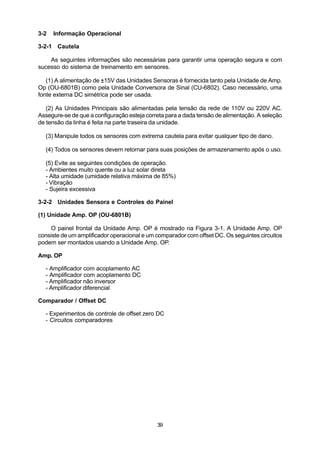








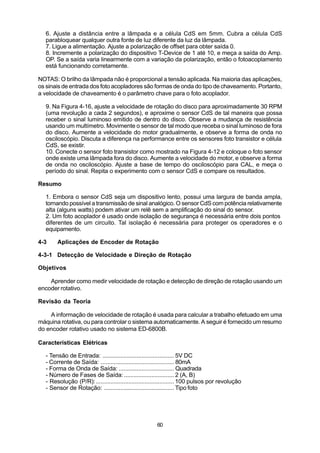





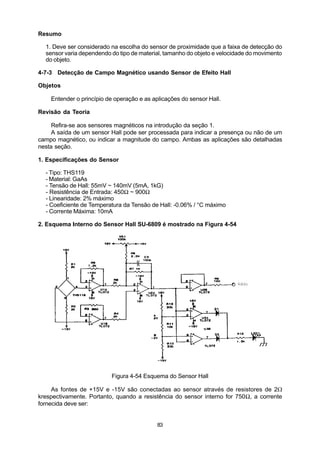
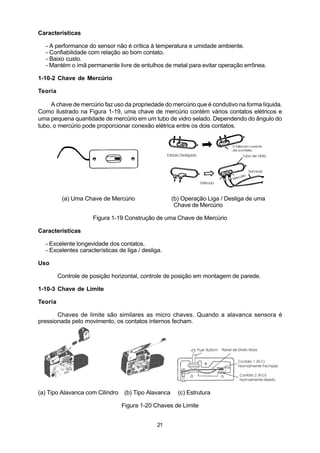
![30[V]
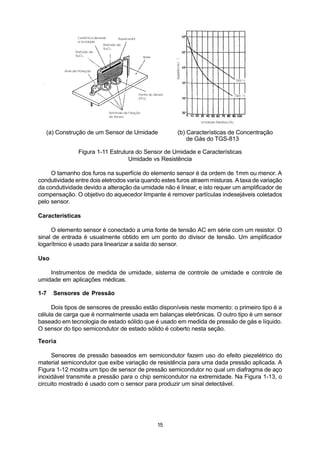
IC = (2+2+0.75)[kOhms] ~6.3[mA]
- U1 serve como buffer entre o sensor e a próximo estágio amplificador.
- U2A é o amplificador de tensão Hall com ganho de tensão dado a seguir, e U2B serve
como um buffer de saída.
R7
AV = R5 = 500
- U3 é um comparador para drenar os LEDs. As entradas de referência, A e B, são ajustadas
para +2V. Como o ganho do amplificador de tensão é 500, o LED1 acenderá quando a
tensão Hall, VH, exceder 2/500=4mV. Se a saída do sensor Hall é 100mV/kG, o campo
magnético detectável que acenderá o LED é 2/100kG=20Gauss.
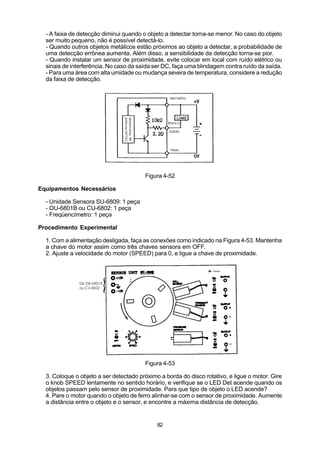
Equipamentos Necessários
- Unidade Sensora SU-6809: 1 peça
- OU-6801B: 1 peça
- Fonte de Alimentação Simétrica (0 ~ ±20V): 1 peça
- Multímetro Digital: 1 peça
- Barra Magnética: 1 peça
Procedimento Experimental
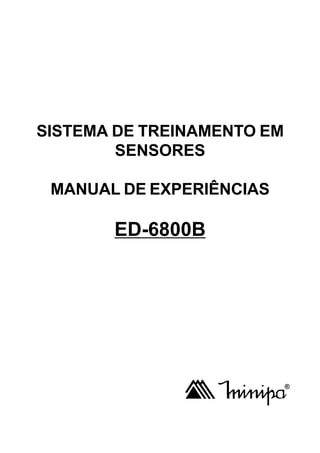
1. Com a alimentação do OU-6801B e a fonte de alimentação desligadas, faça as conexões
como mostrado na Figura 4-55. Ajuste o multímetro para a faixa 20V DC. Mantenha todas as
chaves, a chave do motor e as três chaves sensoras na posição OFF.
2. Ligue a alimentação do OU-6801B e a fonte de alimentação.
3. Ajuste a velocidade do motor para o mínimo (0), e ligue somente o sensor Hall.
4. Coloque os objetos a detectar na borda do disco rotativo e ligue o motor. Gire o knob
SPEED lentamente no sentido horário, e observe o momento que o LED acende. Explique
que tipo de material faz com que o LED acende.
5. Pare o disco quando o LED acender, e meça a tensão de saída.
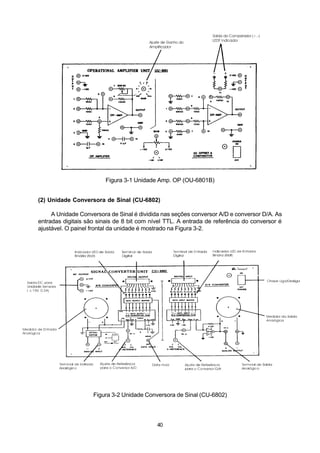
Figura 4-55
6. Alinhe um ímã com o sensor Hall. Varie a distância entre o ímã e o sensor, e meça a
tensão de saída a cada distância especificada na tabela a seguir. Caso necessário, retire o
ímã do disco para conseguir a distância.
84](https://image.slidesharecdn.com/labdeinstrumentacaominipa-111004152938-phpapp01/85/Lab-85-320.jpg)