Baixado 125 vezes










![Proteção em sistemas eletroenergéticos 24
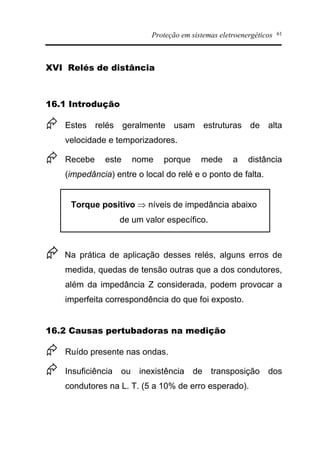
Æ Força líquida:
Æ Substituindo:
Æ Simplificando:
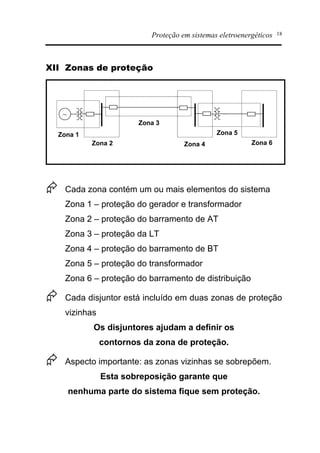
ü A força sob o disco é constante (embora as
grandezas de entrada sejam senoidais) e
proporcional ao seno do ângulo entre os dois
fluxos.
ü Relé livre de vibrações
211212 ffff iiFFF -@-=
( ) ( )[ ]qqff +-+µ wtwtwtwtwF cossencossen21
qff sen21KF µ](https://image.slidesharecdn.com/apostila-protecao-sel354-2003-150118063055-conversion-gate01/85/Apostila-protecao-sel354-2003-25-320.jpg)








































![Proteção em sistemas eletroenergéticos 76
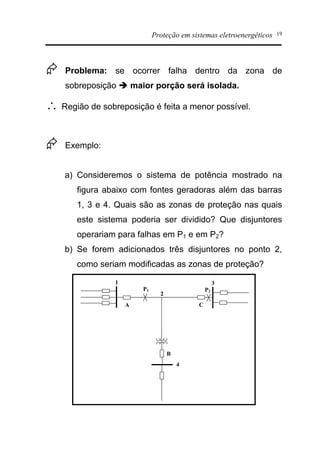
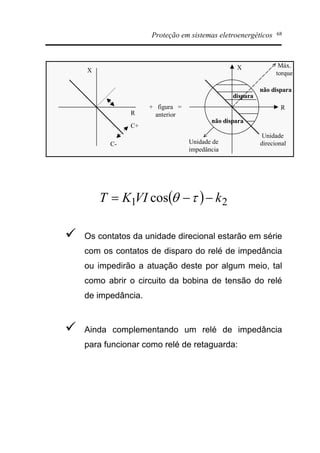
16.7 Relé de impedância modificado
Æ Característica deslocada no plano R-X através de
artifício de polarização.
ü Conjugado:
( ) 3
2
2
2
1 kCIVkIkC ---=
Artifício de compoundagem: faz com que o relé de
impedância tenha sua característica deslocada no plano
R-X, de modo a oferecer resultados semelhantes aos do
relé mho no que diz respeito à acomodação de certa
resistência de arco voltaico. Isso é feito polarizando-se a
bobina de tensão com uma componente CI proporcional
à corrente aplicada no relé.
ü Para C = 0 e k3 = 0, desenvolve-se a expressão
vetorial:
0
2
2
2
1 =-- CIVkIk
[ ] 0cos2 222
2
2
1 =+-- ICCVIVkIk q
( )2
I¸](https://image.slidesharecdn.com/apostila-protecao-sel354-2003-150118063055-conversion-gate01/85/Apostila-protecao-sel354-2003-77-320.jpg)
![Proteção em sistemas eletroenergéticos 77
0cos
2
2
22
22
2
21 =ú
û
ù
ê
ë
é
+--
I
IC
I
CVI
I
V
kk q
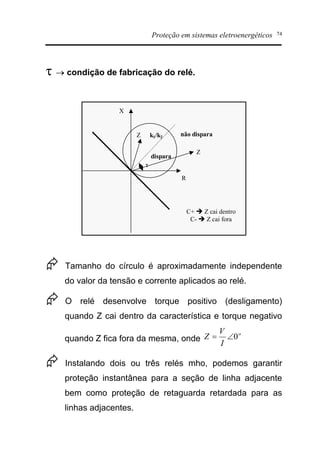
[ ] 0cos2 22
21 =+-- CCZZkk q
ü E como
222
XRZ += e RZ =qcos
[ ] 02 222
21 =+-+- CCRXRkk
[ ] 0)( 22
21 =+-- XCRkk
( )
2
2
122
÷÷
ø
ö
çç
è
æ
=+-
k
k
XCR
Equação de um círculo com centro
deslocado C da origem e com raio igual a
2
1
k
k .](https://image.slidesharecdn.com/apostila-protecao-sel354-2003-150118063055-conversion-gate01/85/Apostila-protecao-sel354-2003-78-320.jpg)

















![3
linhas médias e longas compensações extras são
necessárias. Para resolver a equação (1) foram
introduzidos os parâmetros que limitarão a solução.
Assumindo uma falta na linha PT, ilustrada pela figura 1,
a uma distância k do relé, os valores instantâneos da
tensão e da corrente podem ser calculados pela equação
(2), para uma linha trifásica:
+
=
c
b
a
l
c
b
a
r
c
b
a
i
i
i
dt
d
Lk
i
i
i
Rk
v
v
v (2)
onde va, vb e vc, ia, ib e ic são as tensões e correntes
trifásicas nas respectivas fases a, b e c da linha, e os
parâmetros kr e kl são o comprimento relativo da linha
para a resistência e a indutância, respectivamente. Para
uma falta na linha PT, estes parâmetros assumirão um
valor entre 0 e 1, que representa a distância entre a falta e
a localização do relé, que em condições ideais seriam
iguais.
As matrizes R e L são as matrizes resistência e
indutância para a linha modelada, respectivamente.
Assumindo uma transposição perfeita, tem-se:
=
smm
msm
mms
RRR
RRR
RRR
R
e
=
smm
msm
mms
LLL
LLL
LLL
L
(3)
onde os índices s e m significam própria e mútua,
respectivamente. Os índices 0 e + são utilizados na
representação do sistema através das componentes de
seqüência zero e positiva, respectivamente.
A relação entre os parâmetros são:
L+
= Ls - Lm
(4)
R+
= Rs - Rm
L0
= Ls – 2Lm
R+
= Rs - 2Rm
De (4) , segue que:
3Lm = L0
– L+ (5)
3Rm = R0
– R+
Foram usadas as equações (4) para rescrever a
equação (1) como:
( ) ( )
−+
−+
+
=
++++
0
0
0
0
0
0
0
0
a
i
i
i
dt
d
LLk
i
i
i
RRk
i
i
i
dt
d
Lk
i
i
i
Rk
v
v
v
lr
c
b
a
l
c
b
a
r
c
b
(6)
Com a corrente de seqüência zero igual a:
i0 = (ia + ib + ic)/3 (7)
A seguir serão derivadas a equações para os tipos de
faltas estudados.
3.1 Falta fase-terra.
Assumindo uma falta fase-terra, ocorrendo na fase a e a
uma distância k do relé, o valor instantâneo da tensão va,
que é a tensão da fase a no ponto do relé, pode ser
calculada usando a equação (8). Os parâmetros kr e kl,
que são os fatores multiplicadores da resistência e
indutância, respectivamente para uma falta na linha,
podem ser escritos na forma:
( )[ ] ( )
−++−+= ++++
dt
di
LL
dt
di
LkiRRiRkv a
lara
00
0
0 (8)
e a expressão pode ser escrita na forma geral como:
dt
di
kikv l
lrr +=
(9)
Onde:
( )
( )0
0
0
0
iLLiLi
iRRiRi
vv
al
ar
a
++
++
−+=
−+=
= (10)
3.2 Falta fase-fase-terra ou fase-fase
Considerando uma falta entre as fases a e b, a uma
distância k, envolvendo ou não a terra, a sua equação
pode ser representada pela expressão:
( ) ( )
−+
−+
+
=
++++
0
00
0
00
i
i
dt
d
LLk
i
i
RRk
i
i
dt
d
Lk
i
i
Rk
v
v
lr
b
a
r
b
a
r
b
a (11)
e na sua forma geral
dt
di
kikv l
lrr +=
(12)
Onde:
( )
( )bal
bar
ba
iiLi
iiRi
vvv
−=
−=
−=
+
+
(13)
3.3 Falta trifásica
Para uma falta trifásica a uma distância k do relé, desde
que a falta seja simétrica, a equação (6) pode ser rescrita
da forma:
+
=
++
c
b
a
l
c
b
a
r
c
b
i
i
i
dt
d
Lk
i
i
i
Rk
v
v
va (14)
Definimos os componentes αβ por:
=
c
b
a
v
v
v
M
v
v
β
α onde
= −
−−
2
3
2
3
2
1
2
1
0
1
3
2
M
(15)
As três quantidades a, b, c são convertidas em duas
novas quantidades ortogonais entre si, ficando a equação
geral da forma:](https://image.slidesharecdn.com/apostila-protecao-sel354-2003-150118063055-conversion-gate01/85/Apostila-protecao-sel354-2003-105-320.jpg)




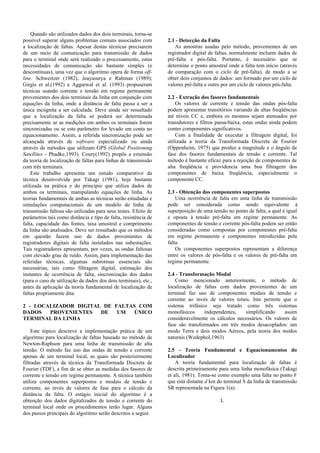
![S R
d
V’S V’R
I’S I’RF
RF
I’F
I’FS I’FR
V’F
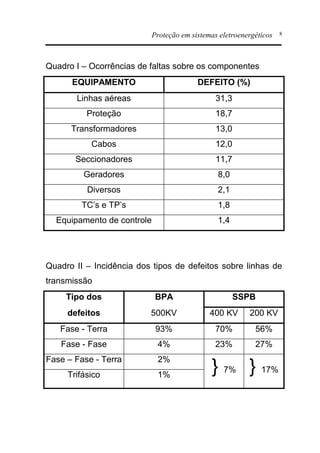
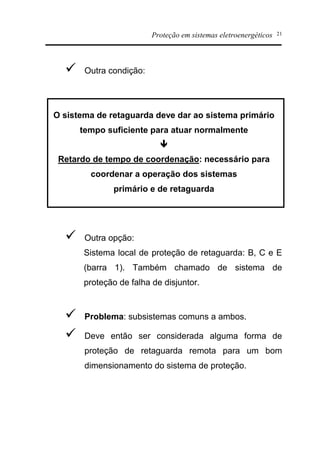
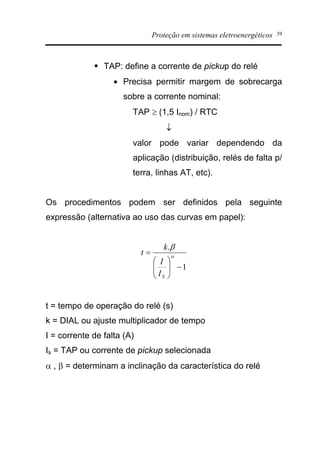
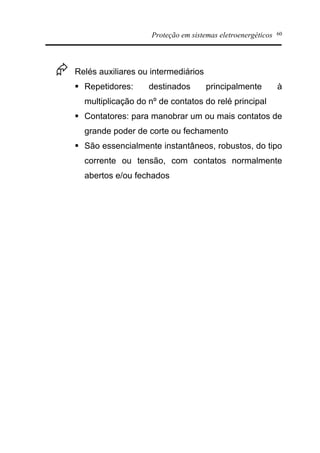
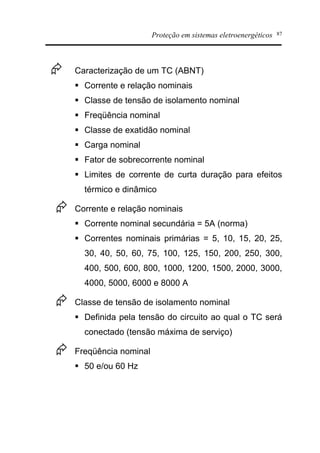
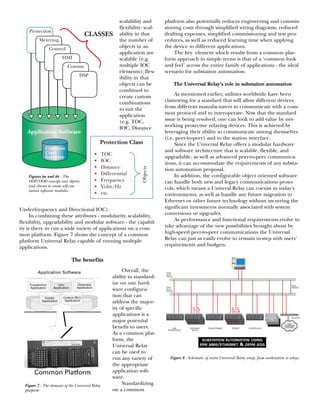
Figura 1(a) - Rede faltosa
Aplicando-se a teoria da superposição em redes lineares,
separa-se uma rede faltosa em duas redes derivadas: uma
rede pré-falta e uma rede em que a falta foi isolada,
representadas respectivamente pelas Figuras 1(b) e 1(c).
S R
VS VR
IS IR
Figura 1(b) - Rede pré-falta
S
F
V”S V”R
VF
I”S I”R
F
R
RF
I”FRI”FS
IF
Figura 1(c) - Rede com a falta isolada
Seja V’F o vetor de tensão em F, e seja IF’ o vetor de
corrente na resistência de falta RF na rede faltosa. Temos
então,
V’F = RF . I’F
= -RF (I”FS+I”FR) (1)
sendo V’F o fasor de tensão pós-falta no ponto F, I’F o
fasor de corrente pós-falta no ponto F, I”FS igual a corrente
da linha de F para S e I”FR igual a corrente de F para R,
ambas definidas na rede com a falta isolada.
Uma nova variável K(d) é definida como
K(d) ≅
I"
I"
FR
FS
(2)
Pode ser observado que a razão K(d) é uma função da
distância d à falta. A substituição da equação (2) na equação
(1) produz:
V’F = -RFI”FS(1+K(d)) (3)
V’F e I”FS podem ser estimados pelos vetores medidos
localmente, utilizando a Teoria dos Quadripólos,
V’F = A(d)V’S-B(d)I’S (4)
I”FS = C(d)V”S-D(d)I”S (5)
onde A(d), B(d), C(d) e D(d) são as quatro constantes para
a porção SF da linha, definidas para um sistema distribuído
como:
A(d) = D(d) = cosh(λd) (6)
B(d) = ZC senh(λd) (7)
C(d) = senh(λd)/ZC (8)
onde λ é a constante de propagação e ZC é a impedância
característica da linha.
Os vetores faltosos V’S e I’S são obtidos diretamente no
terminal local S, enquanto que os vetores para a rede de
falta isolada V”S e I”S são obtidos através da diferença entre
os vetores pós-falta e os vetores pré-falta, como descrito
anteriormente,
V”S ≅ V’S - VS (9)
I”S ≅ I’S - IS (10)
Portanto, a equação (3) pode ser rescrita apenas com
vetores obtidos localmente, como:
A(d)V’S-B(d)I’S=-RF{1+K(d)}{C(d)V”S-D(d)I”S} (11)
o que leva a
R {1 K( )}
A( )V B( )I
C( )V" D( )I"
F
S S
S S
+ =−
′ − ′
−
d
d d
d d
(12)
Como a impedância de falta é puramente resistiva, isto
implica que RF é uma variável real. A razão K(d) também
será real com a condição de que a linha de transmissão seja
sem perdas, e as impedâncias das fontes nos dois terminais
da linha sejam puramente indutivas. Tudo isto implica que
o lado esquerdo da equação (12) será real. Portanto, o lado
direito da equação (12) também deverá ser real para que
sentença seja verdadeira.
A equação básica do localizador é então definida como:
Imag[
A( )V B( )I
C( )V" D( )I"
] 0S S
S S
d d
d d
′− ′
−
= (13)
onde Imag[.] representa a parte imaginária de uma variável
complexa. A solução d da equação (13) é a distância do
ponto da falta ao terminal local. Como a equação (13) não é
uma equação linear, é necessário uma técnica de solução
iterativa. É então utilizada a técnica Newton-Raphson
aplicada ao problema da localização da falta.
A equação básica obtida contém a distância (d)
desconhecida, fasores filtrados de tensão e corrente obtidos
localmente e parâmetros da linha. Assim, o processo de
localização da falta pode ser realizado sem nenhum dado de
terminal remoto. Não são necessários canais de
comunicação entre os terminais. A equação básica não
inclui a resistência de falta RF.
As características do localizador de falta para uma linha
monofásica são obviamente aplicáveis para uma linha](https://image.slidesharecdn.com/apostila-protecao-sel354-2003-150118063055-conversion-gate01/85/Apostila-protecao-sel354-2003-111-320.jpg)
![trifásica. A equação básica pode então ser estendida para
uma linha trifásica. Seja (.)(W)
uma quantidade modal. Então
para uma falta fase-terra a equação fica,
Im
( ) ( )
( ) ( ) ( )
( ) ( ) ( ) ( )
ag
V V V
C d V D d I
F F F
j
S
j j
S
j
′ + ′ + ′
′′ − ′′
=
1 2 3
0 (14)
j=1,2,3
e para uma falta fase-fase,
Im
( ) ( )
( ) ( )
( ) ( ) ( ) ( )
ag
V V
C d V D d I
F F
j
S
j j
S
j
′ − ′
′′ − ′′
=
2 3
0 (15)
j=1,2
As tensões modais em F são estimadas pela equação
(16).
V’F
(W)
= A(W)
(d)V’S
(W)
-B(W)
(d)I’S
(W)
(16)
W=1,2,3
3 - LOCALIZADOR DIGITAL DE FALTAS COM
DADOS PROVENIENTES DOS DOIS TERMINAIS
DA LINHA
Será descrito a seguir um algoritmo para localização de
faltas utilizando dados dos dois terminais da linha de
transmissão de alta tensão, representada pela Figura 1(a). O
algoritmo baseia-se na utilização dos fasores fundamentais
trifásicos de corrente e tensão de ambos os terminais.
Portanto, a existência de um mecanismo de comunicação de
dados entre os terminais e o processador se faz necessária.
Deve ser ressaltado que a abordagem desenvolvida
utiliza os fasores fundamentais obtidos de ambos os
terminais, assim, estes valores devem ser sincronizados em
relação à uma referência de tempo comum.
3.1 - Detecção do instante de ocorrência da falta
Aqui a detecção da falta é introduzida com o mesmo
propósito do método utilizando dados de um terminal, com
a diferença de que são determinados os pontos iniciais da
ocorrência da falta em ambos os terminais. São então
obtidos dois conjuntos com um ciclo de dados de pré e pós-
falta relativos a cada terminal.
3.2 - Extração dos fasores fundamentais
O processo é idêntico ao descrito na seção 2.2, sendo a
filtragem efetuada em ambos os terminais.
3.3 - Sincronização dos dados
Como o algoritmo envolve utilização de dados dos dois
terminais da linha de transmissão, é de extrema importância
que os fasores de tensão e corrente em ambos os terminais
estejam relacionados por uma referência de tempo comum.
Uma sincronização para a referência de tempo nos dois
terminais pode ser conseguida através de um canal de
ligação contínuo entre os terminais, mas esta solução seria
muito dispendiosa. Na prática, os dados de pré-falta de
corrente e tensão em um dos terminais podem ser usados
para providenciar uma referência comum (sincronização)
com relação aos dados gravados no outro terminal. Por
exemplo, a tensão pré-falta no terminal remoto pode ser
calculada pelo equipamento localizado no terminal local
através de equações de linha dada por (17). Esta abordagem
elimina a necessidade de sincronização dos dados através
de uma linha de comunicação exclusiva, podendo esta
sincronização ser efetuada através do software do próprio
localizador ( Coury e Aggarwali, 1991).
VS = cosh (λL)VR - ZC senh (λL)IR (17)
onde L = comprimento da linha
A avaliação da equação (17) fornece o ângulo de fase
entre as tensões dos terminais local e remoto para os dados
de pré-falta. Este ângulo, por sua vez, é usado para
providenciar uma referência de tempo comum para os
dados de tensão amostrados em cada terminal. Através dele,
uma sincronização perfeita dos dados pode ser obtida.
3.4 - Teoria fundamental e equacionamentos do
localizador
Esta seção descreve os princípios fundamentais da
técnica de localização de faltas utilizando fasores de tensão
e corrente trifásicos dos dois terminais da linha (Girgis et
ali, 1992), considerando-se o sistema descrito pela Figura
1(a).
Admitindo-se que os fasores trifásicos de tensão e
corrente nos barramentos S e R estão sincronizados, então
os vetores trifásicos de tensão nos barramentos S e R
podem ser representados em função dos vetores trifásicos
de corrente, pelas equações (18) e (19).
V’S=V’F+d Zabc I’S (18)
V’R=V’F+(L-d) Zabc I’R (19)
onde:Zabc = matriz impedância da linha trifásica.
Subtraindo-se equação (19) de (18) fica:
V’S-V’R+L Zabc I’R=d Zabc [I’S+I’R] (20)
A equação (20) pode ser rescrita, considerando o
sistema trifásico, da forma:
Y
Y
Y
M
M
M
a
b
c
a
b
c
=
d ou Y=Md (21)
onde:
Y V V L Z ISj Sj Rj ji Ri
i=a,b,c
= ′ − ′ + ′∑ (22)
M Z I Ij ji Si Ri
i=a,b,c
= ′ + ′∑ ( ) (23)
p/ j=a,b,c
com Zji = matriz 3x3 da impedância série
A equação (21) representa três equações complexas ou
seis equações reais para uma incógnita (d), que é a distância
da falta em relação a um terminal da linha.](https://image.slidesharecdn.com/apostila-protecao-sel354-2003-150118063055-conversion-gate01/85/Apostila-protecao-sel354-2003-112-320.jpg)
![Deve ser ressaltado que para o caso prático as equações
(18) e (19) devem levar em consideração as equações de
linha longa e a transformação modal para desacoplamento
descrita anteriormente deve ser utilizada (Coury, 1992).
O algoritmo proposto independe do tipo de falta e da
resistência de falta para seus equacionamentos.
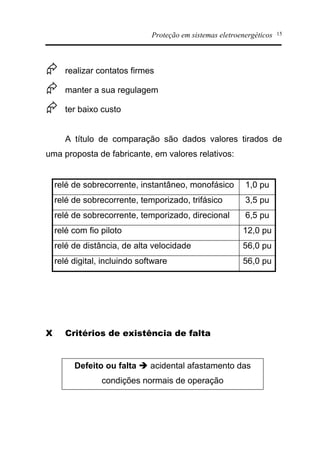
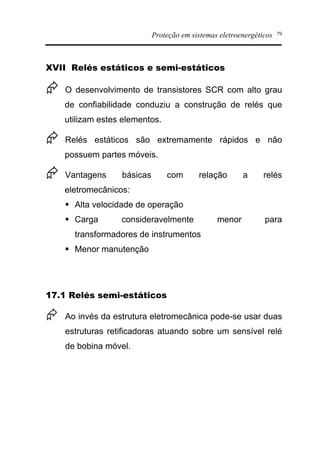
4 - TESTES REALIZADOS PARA OS
LOCALIZADORES DE FALTAS ESTUDADOS
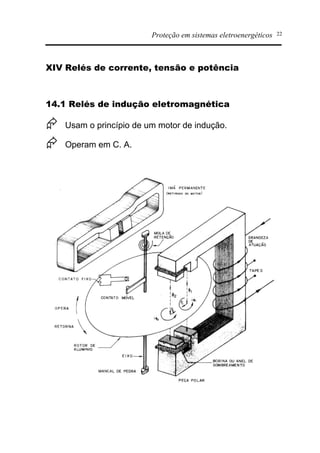
O modelo do sistema de potência estudado é mostrado na
Figura 2.
L = 200 km
20 GVA 5 GVA
tensão nominal - 400 KV
~ ~1 ∠ 0°
1 ∠ 10°
S R
Figura 2 - Modelo do sistema de potência estudado
O sistema corresponde a uma linha de transmissão de 400
kV e 200 km de extensão, interligando duas estações
geradoras de 20 GVA e 5 GVA, respectivamente. Os dados
para teste dos algoritmos foram obtidos através do software
TEER, que simula os sinais de uma linha de transmissão
sob condição de curto-circuito (Johns e Aggarwal,1976). A
resposta do algoritmo para uma falta a-terra é ilustrado na
Figura 3.
0 20 40
-4
-2
0
2
4
fase a
fase b
fase c
CorrentenabarraP[kA]
tempo [ms]
0 20 40
-400
-200
0
200
400
fase a
fase b
fase c
TensãonabarraP[kV]
tempo [ms]
Figura 3 - Ondas típicas de corrente e tensão para
uma falta fase-terra com um ciclo de dados pré-falta
Deve ser ressaltado que a saída do referido software
simula os registradores digitais de falta anteriormente
citados. Os algoritmos foram testados para uma variedade
de condições da linha de transmissão considerada, com o
objetivo de cobrir grande parte das situações comuns à uma
linha de transmissão de alta tensão. Primeiramente, foram
testados diferentes tipos de faltas em diversas localizações
da linha. Posteriormente, o mesmo foi testado para
variações na resistência de falta, capacidade das fontes, taxa
amostral utilizada e comprimento total da linha. A maior
parte dos testes foi realizada a uma taxa amostral de 4 kHz.
4.1 - Testes da técnica baseada em dados provenientes
de um único terminal
Os resultados obtidos são apresentados a seguir, de
acordo com os grupos apresentados anteriormente para as
duas técnicas de localização de falta.
A margem de erro dos cálculos é expressa como uma
porcentagem do comprimento total da linha e é dada pela
expressão:
% erro =| distância estimada -distância real |x100% (24)
comprimento da linha
E a faixa de busca é dada por:
F=| distância estimada -distância real | (25)
4.1.1 - Determinação do instante de ocorrência da falta
Conforme explicitado na seção 2.1, a determinação do
ponto de ocorrência da falta é baseada na comparação das
amostras de cada fase da linha com as amostras
correspondentes, um ciclo anterior. Após a ocorrência de
três amostras consecutivas com variações significativas, a
ocorrência da falta é identificada. Nos testes realizados, o
atraso máximo ocorrido para a detecção desse instante foi
de 3 amostras. Este atraso não exerce nenhuma
conseqüência, direta ou indireta, sobre a precisão do
algoritmo.
4.1.2 - Extração dos fasores fundamentais das ondas de
tensão e corrente através da TDF
A TDF extrai as componentes fundamentais das ondas
ruidosas de tensão e corrente dos dados pós-falta. Através
dos testes realizados pode-se afirmar que a técnica de
filtragem proposta é bastante eficaz para a finalidade a que
foi incorporada ao algoritmo.
4.1.3 - Cálculo da distância da falta em relação ao
terminal local
O passo final foi a aplicação do Método Newton-
Raphson para a obtenção da distância da falta em relação ao
terminal local. O método foi aplicado utilizando-se as
equações (14) e (15) descritas anteriormente. Para a maioria
dos casos, as soluções convergiram em 3 iterações. Um
processo iterativo é mostrado na Figura 4 para uma falta
AT a 122 km do terminal emissor, para a linha considerada.](https://image.slidesharecdn.com/apostila-protecao-sel354-2003-150118063055-conversion-gate01/85/Apostila-protecao-sel354-2003-113-320.jpg)















O documento discute os princípios fundamentais da proteção em sistemas eletroenergéticos, incluindo tipos de relés, causas de defeitos, efeitos de curto-circuito, estatísticas de falhas, classificação e características de relés de proteção.