Baixado 214 vezes
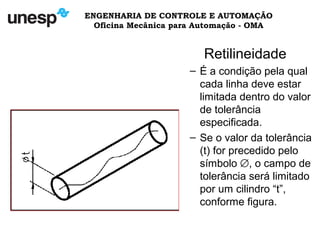
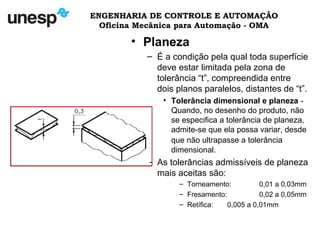
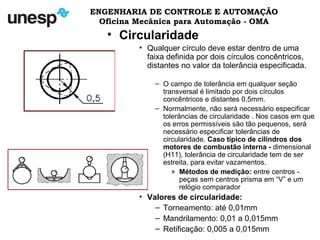
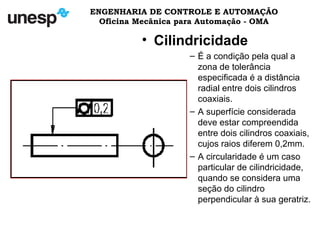
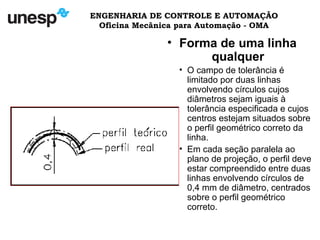
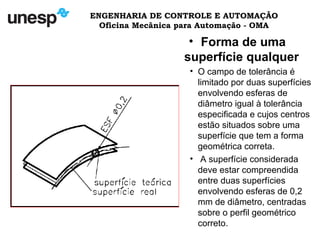
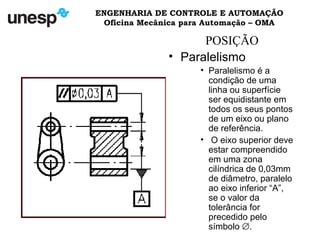
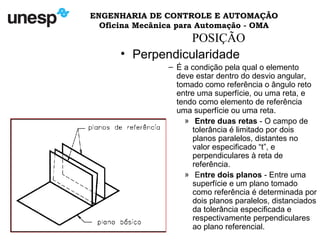
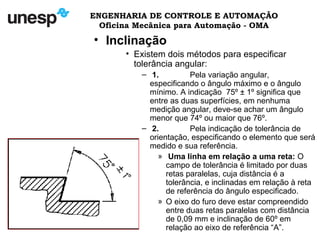
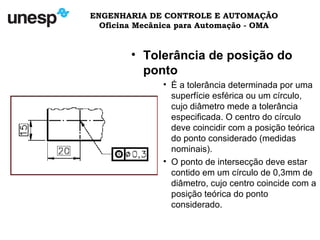
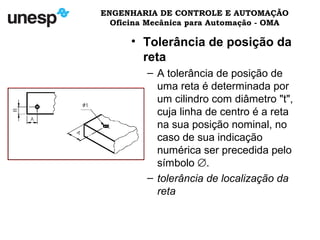
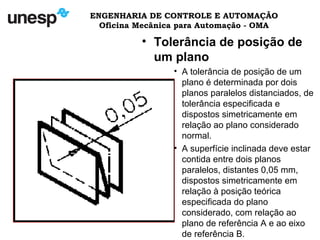
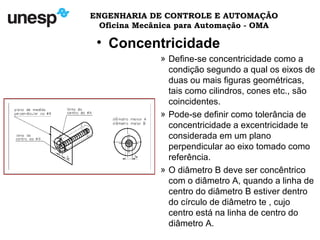

O documento discute vários tipos de tolerâncias geométricas, incluindo forma, posição, retilineidade, planaridade, circularidade, cilindricidade, paralelismo, perpendicularidade, concentricidade e coaxialidade. Fornece definições e exemplos de como cada tolerância é especificada e medida.