1. O documento descreve conceitos de metrologia e instrumentos de medição, incluindo sistemas de unidades, tolerâncias, rugosidade e tolerâncias geométricas.
2. É apresentada uma classificação dos principais sistemas de unidades e sua relação, assim como técnicas de conversão entre eles.
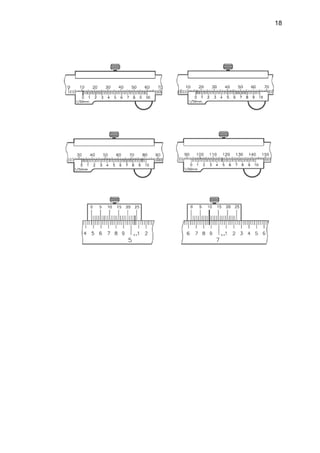
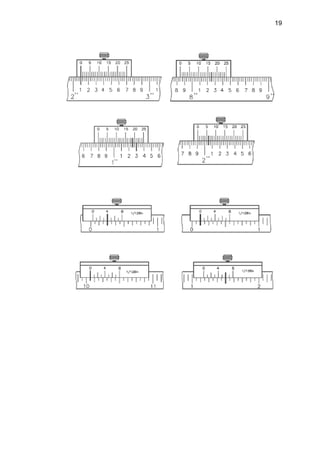
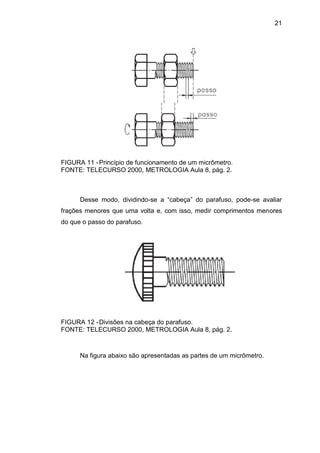
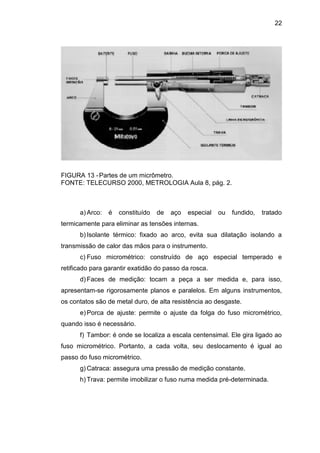
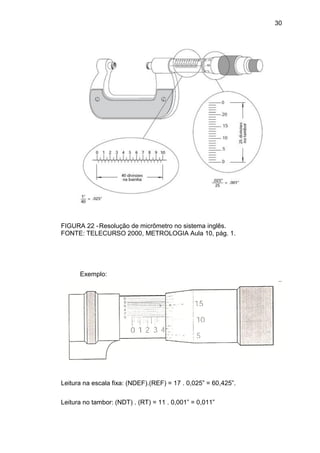
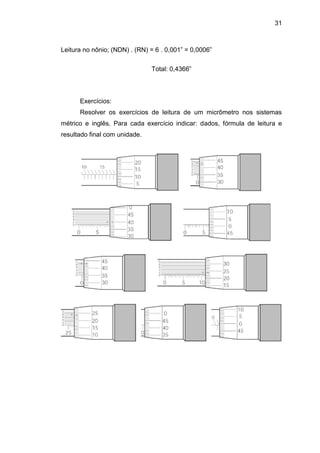
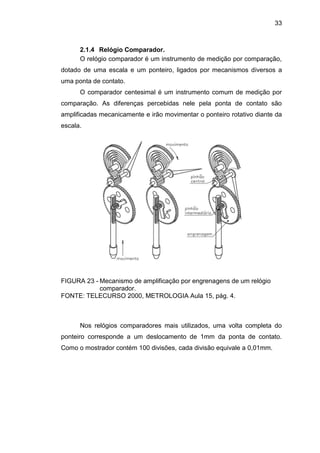
3. São descritos diversos instrumentos de medição como micrômetro, paquímetro, relógio comparador e seus princípios de funcionamento. Conceitos como erros de medição, tolerâncias dimensionais e de ajuste





































































![[Apostila] Processo De Soldagem E Corte 1 Senai](https://cdn.slidesharecdn.com/ss_thumbnails/apostilaprocessodesoldagemecorte1-senai-100411170841-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)



















































