Baixado 237 vezes



![INVERSORES-2002-2006
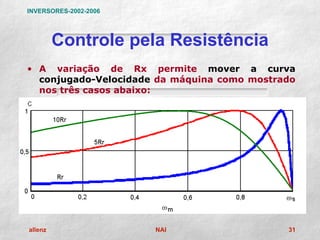
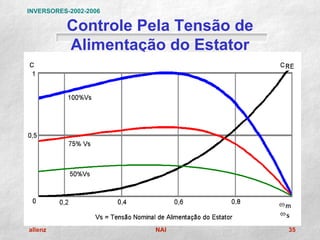
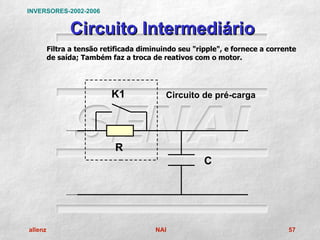
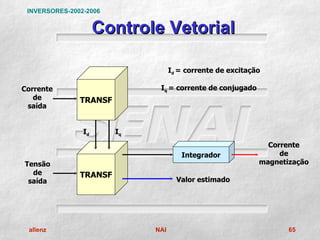
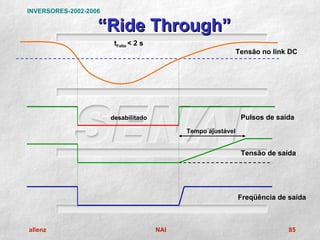
Controle Pela Tensão de
Alimentação do Estator
Das equações do conjugado, podemos observar que:
2
3 ⋅ R r ⋅ VS
Cd =
R r 2 2
S ⋅ ω S + ( XS + Xr )
S
2
3 ⋅ R r ⋅ VS
CS =
[
ωS ⋅ ( Rr ) + ( X S + X r )
2 2
]
O conjugado é proporcional ao quadrado da tensão
aplicada ao estator.
Assim, para um dado conjugado resistente, uma
redução na tensão provoca uma diminuição da
velocidade (de fato um aumento no escorregamento).
allenz NAI 34](https://image.slidesharecdn.com/inversores2-120525135012-phpapp02/85/Inversores2-34-320.jpg)




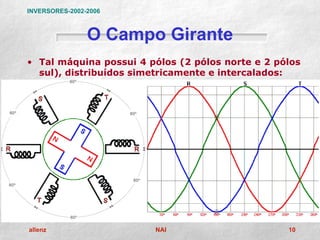
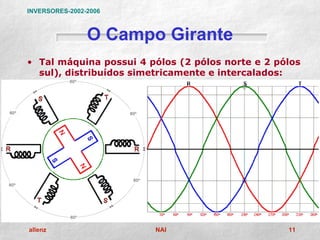
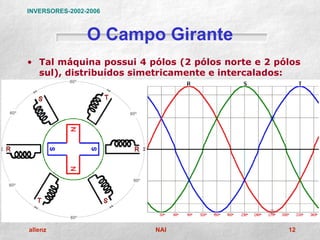
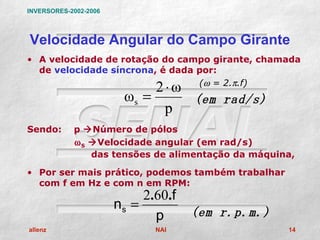
O documento descreve as características e o funcionamento do motor de indução trifásico. Ele destaca as vantagens do motor de indução em relação ao motor CC, como simplicidade e menor custo. Também aborda as barreiras iniciais ao uso do motor de indução e como a evolução tecnológica dos anos 90 permitiu seu uso mais amplo, especialmente com o controle vetorial. Por fim, explica conceitos como campo girante, número de pólos, velocidade síncrona e escorregamento.















































