O documento discute filtros ativos, incluindo suas vantagens sobre filtros passivos, principais tipos, topologias comuns e circuitos integrados. Aborda também filtros digitais, explicando como funcionam e seus benefícios em relação aos analógicos.
INTRODUÇÃO
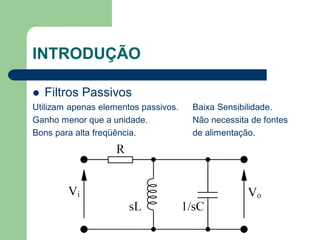
Filtros Passivos
Utilizam apenas elementos passivos. Baixa Sensibilidade.
Ganho menor que a unidade. Não necessita de fontes
Bons para alta freqüência. de alimentação.
5.
INTRODUÇÃO
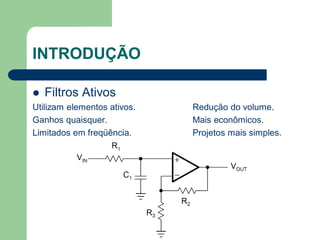
Filtros Ativos
Utilizam elementos ativos. Redução do volume.
Ganhos quaisquer. Mais econômicos.
Limitados em freqüência. Projetos mais simples.
6.
INTRODUÇÃO
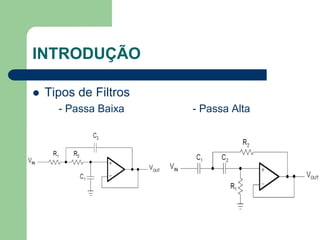
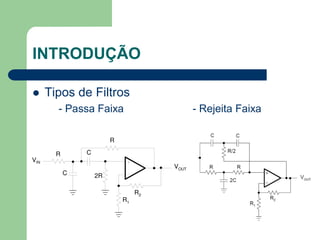
Tipos de Filtros
- Passa Baixa - Passa Alta
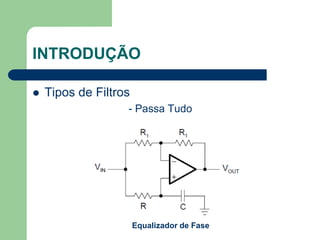
INTRODUÇÃO
Tipos de Filtros
- Passa Tudo
Equalizador de Fase
9.
INTRODUÇÃO
Metas do Projeto de um Filtro
– Ganho constante na banda passante.
– Resposta de fase linear na banda passante.
– Máxima rejeição fora da banda passante.
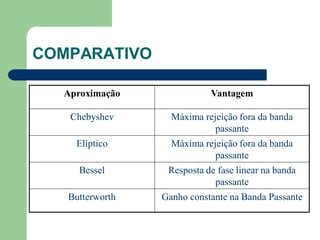
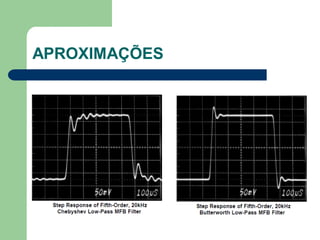
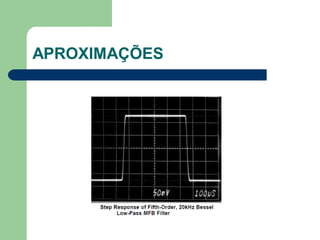
COMPARATIVO
Aproximação Vantagem
Chebyshev Máxima rejeição fora da banda
passante
Elíptico Máxima rejeição fora da banda
passante
Bessel Resposta de fase linear na banda
passante
Butterworth Ganho constante na Banda Passante
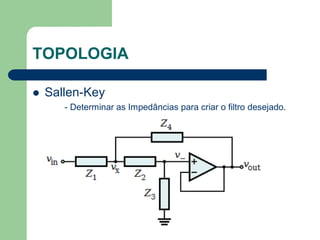
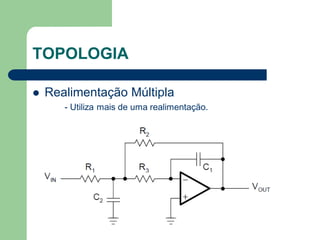
COMPARATIVO
Tipos Outros Complexidade Sensibilidade Vantagens
Nomes
Sallen-Key VCVS Baixa Alta Simplicidade,
não inversor
Realimentação MFB Baixa Alta Simplicidade,
Múltipla inversor
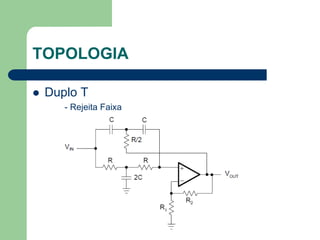
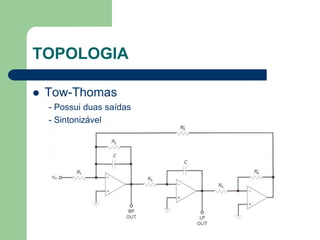
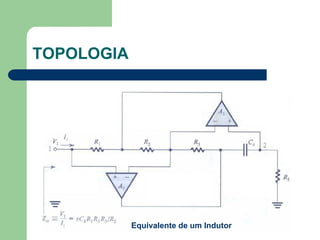
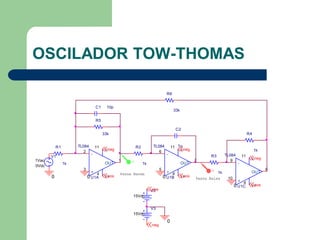
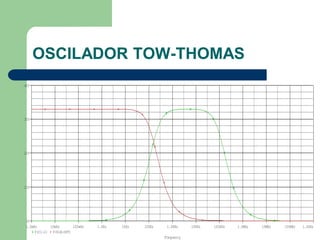
Tow-Thomas Biquad Alta Baixa Estabilidade,
BW constante
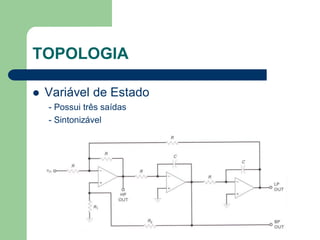
Variável de KHN Alta Baixa Estabilidade,
Estado Q constante
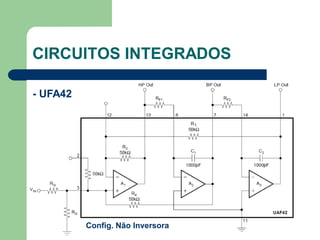
CIRCUITOS INTEGRADOS
Universais
– UFA42
– MAX 260, 261, 262, 274 e 275
– SAA4960 e SAA4961
Video
– FMS6143, FMS6146 e FMS6151
Multimidia (USB, Video e Aúdio)
– FSA203
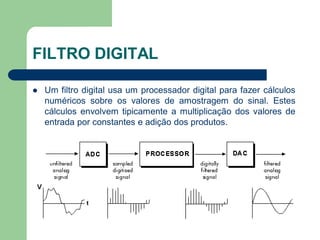
FILTRO DIGITAL
Um filtro digital usa um processador digital para fazer cálculos
numéricos sobre os valores de amostragem do sinal. Estes
cálculos envolvem tipicamente a multiplicação dos valores de
entrada por constantes e adição dos produtos.
28.
FILTRO DIGITAL
Técnicas
– Filtro Não-Recursivo (FIR)
– Filtro Recursivo (IIR)
LEGENDA
Sinal Original
Sinal Filtrado
Filtragem através de Média Móvel
29.
FILTRO DIGITAL
Vantagens
– Programável
– Projeto e Teste simplificados
– Estáveis a Temperatura e Ruído
– Várias topologias num único módulo
Desvantagens
– Custo
– Freqüência de Operação