Baixado 318 vezes








![Prof. Romel Dias Vanderlei
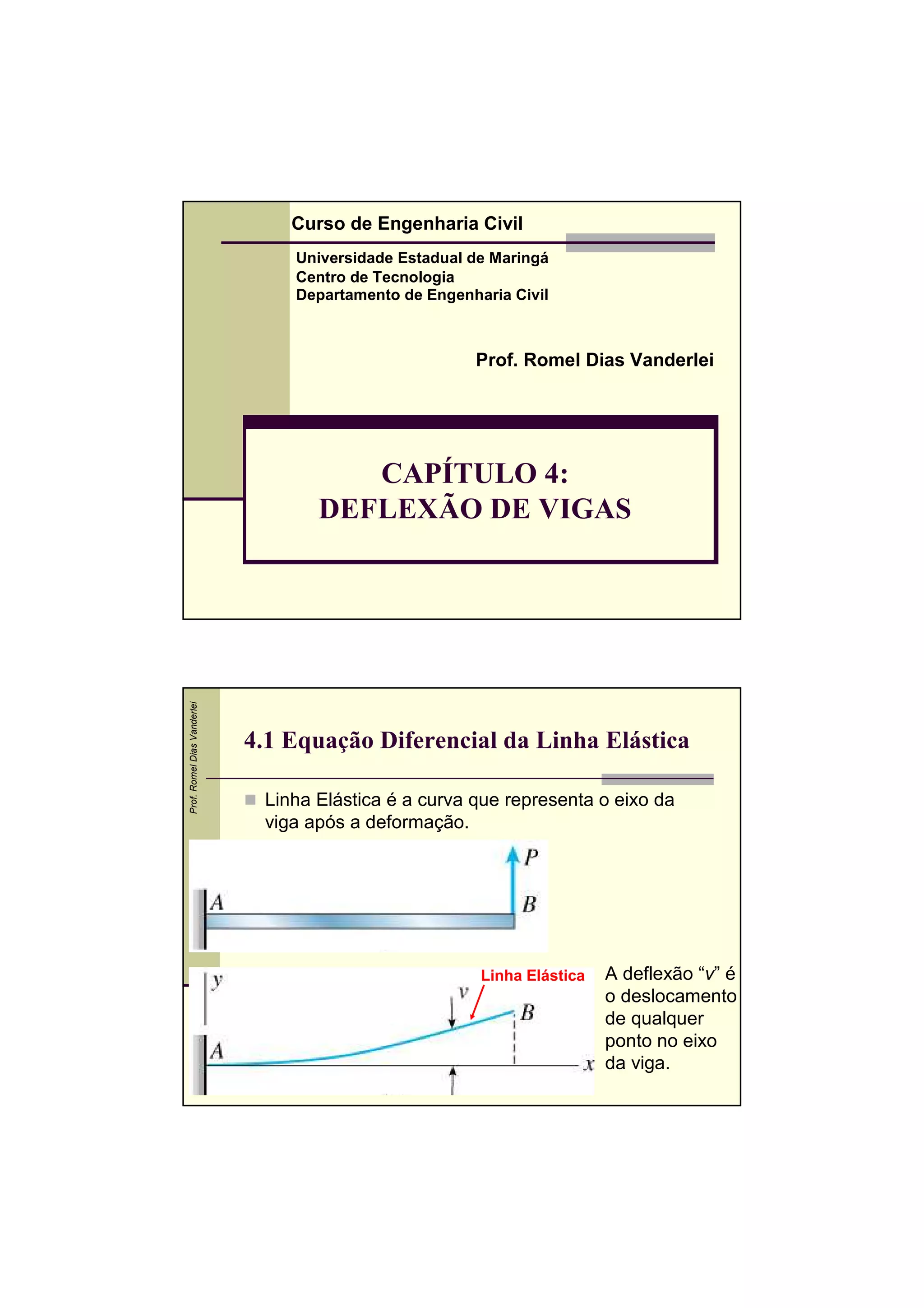
4.1 Equação Diferencial da Linha Elástica
b) Equação da Linha Elástica:
qL q
EI z ⋅ v '' = M = ⋅ x − ⋅ x 2 [.(dx)]
2 2
qL q
EI z ⋅ v '' ⋅ dx = ⋅ x ⋅ dx − ⋅ x 2 ⋅ dx
2 2
qL q 2
EI z ∫ v '' ⋅ dx = ∫ x ⋅ dx − 2 ∫ x ⋅ dx 1ª integração
2
(EI z ⋅ v ' ) = ∫ qL ⋅ x2 − q ⋅ x3 + C1
2 3
∫
2
2
2ª integração
qL x 3 q x 4
EI z ⋅ v = ⋅ − ⋅ + C1 ⋅ x + C 2
4 3 6 4
Prof. Romel Dias Vanderlei
4.1 Equação Diferencial da Linha Elástica
Condições de Contorno:
(I) x = 0 → v = 0
L
(II) x = L → v = 0 e x = → v′ = 0
2
(I) x = 0 → v = 0∴ 0 = 0 − 0 + 0 + C2 → C2 = 0
qL q
(II) x = L → v = 0∴ 0 = .L3 − .L4 + C 1 .L + 0
12 24
qL 4 qL 4
qL 4
qL 3
0 = − + C 1 .L = + C 1 .L → C 1 = −
12 24 24 24](https://image.slidesharecdn.com/capitulo4-deflexaodevigas-121020085956-phpapp02/85/Capitulo4-deflexaode-vigas-10-320.jpg)




















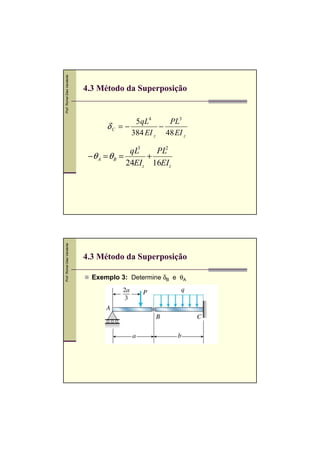











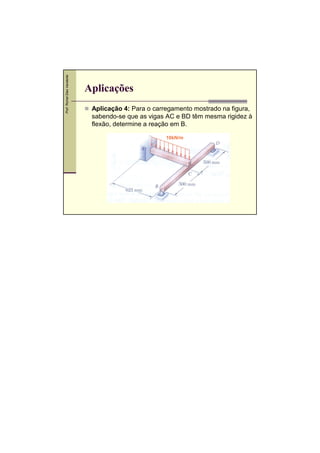

O documento descreve o capítulo 4 sobre deflexão de vigas de um curso de engenharia civil. O capítulo apresenta a equação diferencial da linha elástica para vigas sob flexão e discute as condições de contorno e continuidade. Dois exemplos ilustram o cálculo da deflexão, rotação e outros parâmetros para vigas sob diferentes configurações de carregamento.















































