1) O documento discute os principais tipos de motores elétricos, suas características e aplicações.
2) É destacado o motor de indução como o mais simples e versátil, funcionando através da indução eletromagnética.
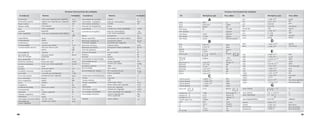
3) São explicados conceitos básicos como corrente contínua e alternada, potência elétrica, trabalho mecânico entre outros, importantes para especificação e seleção correta do motor.