Baixar para ler offline
![Determinemos os esforços momentos flectores nas extremidades das barras por aplicação
do Método dos Deslocamentos. Neste caso, já conhecemos os esforços nas barras
correspondentes à fixação do apoio fictício:
R10 R30 R20= R’20+ R’’20 p
L1 L2
R10
R’20
p R30
R’’20
= +
e será apenas necessário determinar os esforços provocados pelo momento M2
concentrado aplicado na direcção 2:
Δ2=1
k’22
R*12 R*32
k’’22
L1 L2
[ ] { } { } { } K2′2 + K2′′2 ⋅ Δ2 + 0 = M2
2
⋅
− −
p L
12
⋅
⋅
E I
4 4
⋅ +
E I
L
1 2
2
M
′ + ′′
K K
22 22
Δ =
2
⋅
=
L
i.e.
R12
R’22
R32
R’’22
+
Δ2
2
2
′
22
K
′ + ′′
K K
22 22
′′
22
K
′ + ′′
K K
22 22
′ = ′ ⋅ Δ =
R K
22 22 2
′′ = ′′ ⋅ Δ =
R K
22 22 2
M
M
⋅
⋅
Método de Cross – J. Miranda Guedes (DEC – FEUP) – 2001/2002 2](https://image.slidesharecdn.com/135781509-metodo-cross-1-141027232159-conversion-gate02/85/135781509-metodo-cross-1-2-320.jpg)

![Apliquemos a sequência de cálculo anterior. Determinemos os esforços momentos
flectores nas extremidades das barras por aplicação do Método dos Deslocamentos. Neste
caso, já conhecemos os esforços nas barras correspondentes à fixação do apoio fictício:
p
L1
=
L2
R20= R’20+ R’’20
R’’20
p
R’20
+
Δ2
e será apenas necessário determinar os esforços provocados pelo momento M2
concentrado aplicado na direcção 2:
L1
E, I
L2
Δ2=1
K’22 K’’22
[ ] { } { } { } K2′2 + K2′′2 ⋅ Δ2 + 0 = M2
2
⋅
− −
p L
12
⋅
⋅
E I
4 4
⋅ +
E I
L
1 2
2
M
′ + ′′
K K
22 22
Δ =
2
⋅
=
L
i.e.
Δ2
R’22 R’’22
+
Método de Cross – J. Miranda Guedes (DEC – FEUP) – 2001/2002 4](https://image.slidesharecdn.com/135781509-metodo-cross-1-141027232159-conversion-gate02/85/135781509-metodo-cross-1-4-320.jpg)

![Apliquemos a sequência de cálculo anterior. Determinemos os esforços momentos
flectores nas extremidades das barras por aplicação do Método dos Deslocamentos. Neste
caso, já conhecemos os esforços nas barras correspondentes à fixação do apoio fictício:
R20= R’20+ R’’20
R20
p
+
E, I
L2
L1
R’’20
p
R’20
+
e será apenas necessário determinar os esforços provocados pelo momento M2
concentrado aplicado na direcção 2:
E, I
L2
L1
Δ2=1
K’22 K’’22
[ ] { } { } { } K2′2 + K2′′2 ⋅ Δ2 + 0 = M2
2
⋅
− −
p L
12
⋅
⋅
E I
4 4
⋅ +
E I
L
1 2
2
M
′ + ′′
K K
22 22
Δ =
2
⋅
=
L
i.e.
Δ2
R’22 R’’22
+
2
2
′
22
K
′ + ′′
K K
22 22
′′
22
K
′ + ′′
K K
22 22
′ = ′ ⋅ Δ =
R K
22 22 2
′′ = ′′ ⋅ Δ =
R K
22 22 2
M
M
⋅
⋅
Método de Cross – J. Miranda Guedes (DEC – FEUP) – 2001/2002 6](https://image.slidesharecdn.com/135781509-metodo-cross-1-141027232159-conversion-gate02/85/135781509-metodo-cross-1-6-320.jpg)

![Apliquemos a sequência de cálculo anterior. Determinemos os esforços momentos
flectores nas extremidades das barras por aplicação do Método dos Deslocamentos. Neste
caso, já conhecemos os esforços nas barras correspondentes à fixação do apoio fictício:
R20=(R20)1+(R20)2+(R20)3
p
3
E, I
2
(R20)2
(R20)1
α
(R20)3
1
e será apenas necessário determinar os esforços provocados pelo momento M2
concentrado aplicado na direcção 2:
(K22)2
Δ2=1
(K22)1 3
E, I
α
2
1
(K22)3
[( ) ( ) ( ) ] { } { } { } K22 1 + K22 2 + K22 3 ⋅ Δ2 + 0 = M2
2
M
( ) ( ) ( )
3
2
⋅
− −
p L
12
⋅
⋅
⋅
E I
E I
4 4 4
⋅ +
⋅ +
E I
L
L
1 2 3
+ +
K K K
22 1 22 2 22 3
Δ =
2
⋅
=
L
i.e.
Método de Cross – J. Miranda Guedes (DEC – FEUP) – 2001/2002 8](https://image.slidesharecdn.com/135781509-metodo-cross-1-141027232159-conversion-gate02/85/135781509-metodo-cross-1-8-320.jpg)





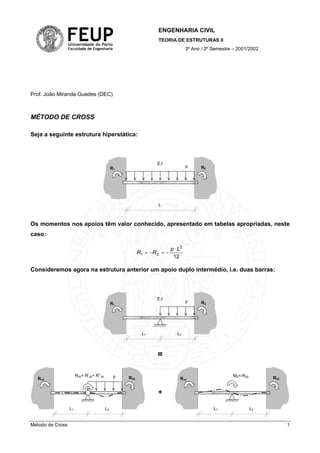
O documento descreve o método de Cross para determinar os esforços internos em estruturas hiperestáticas. O método envolve fixar um apoio fictício no nó livre e aplicar o método dos deslocamentos para determinar os esforços iniciais. Em seguida, calcula-se a influência de um momento concentrado aplicado no nó livre nas barras, proporcional à rigidez à rotação de cada barra. Somando-se os dois efeitos obtêm-se os momentos flectores totais nas extremidades das barras. O mé










































































