Baixado 245 vezes




























![30
são dados um vetor que lhe é normal e onde d = -(ax0 + by0 + cz0) e x; y e z são
um de seus pontos. coordenadas de um ponto P pertencente
a este plano.
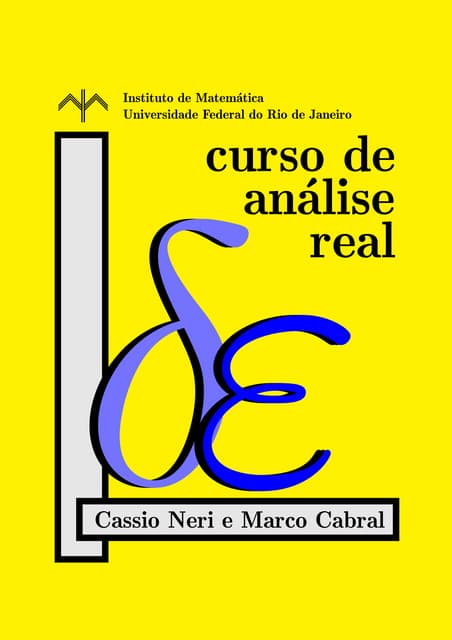
Na figura 41, o plano indicado,
pelos pontos P; Q; R e S, pode ser Demonstração:
fornecido pelo vetor u e um dos pontos Um ponto P, de coordenadas P =
pertencentes a este plano. Note-se que, (x; y; z), pertence ao plano π se, e
qualquer segmento de reta, pertencente somente se, o vetor P0 P for
a este plano, que una um de seus pontos
perpendicular ao vetor N (normal ao
ao ponto do vetor, (ponto este
plano π), ou seja, se o produto escalar
pertencente a este plano), é ortogonal a
este vetor. entre o vetor P0 P e o vetor N for nulo.
4
N P0 P=0
u
Como, P0 P= (x-x0 ; y-y0 ; z-z0 ), o
3 Q
produto escalar entre P0 P e N pode ser
2 reescrito como:
R k (a; b; c) (x-x0 ; y-y0 ; z-z0 )=0
1
S
j 1 2 3 4 5 6
1
i a x-x0 + b y-y0 + c z-z0 =0
2
3
P
ou seja,
ax + by + cz - (ax0 + by0 + cz0) = 0
Figura 41
Podemos lembrar, também, que o o que fornece:
produto vetorial entre dois vetores
fornece um terceiro vetor ortogonal aos d = - (ax0 + by0 + cz0)
dois primeiros. Podemos, dizer, então
que este terceiro vetor é normal ao plano Como exemplo, vamos encontrar a
que contém os dois primeiros. Isto pode equação do plano π que passa pelo
ser observado na figura 42. ponto P0 = (1; -2; -2) e é perpendicular ao
vetor N = (2; -1; 2)
vLw - normal ao plano P
A equação do plano π é dada por:
Plano P
de v, w w
ax + by + cz + d = 0
onde a; b e c são as coordenadas do
vetor normal N. Assim é possível
v
escrever:
2x - y + 2z + d = 0
Figura 42
A equação geral de um plano π Para que P0, pertença ao plano π,
que passa por um ponto P0 = (x0; y0; z0) e é necessário que seja satisfeita a
equação ax+by+cz+d=0 que, substituindo
tem vetor normal N = (a; b; c) é:
d por -(ax0 + by0 + cz0), temos:
ax + by + cz + d = 0
ax + by + cz + [-(ax0 + by0 + cz0)] = 0
Prof. José Carlos Morilla](https://image.slidesharecdn.com/0233-apostila-geometria-111021094912-phpapp01/85/0233-apostila-geometria-30-320.jpg)
![31
Sabendo-se que a; b e c são as vetores da base → i j k
coordenadas do vetor N e substituindo-as componentes de P1 P2 → -1/2 1/2 0
na equação, temos: componentes de P1 P3 → -1/2 -1/2 1/2
2x-y+2z + [-(2·1+ -1 · -2 + 2· -2 )] = 0 As componentes do vetor N
resultante são dadas por:
2x-y+2z + -2+2-4 = 0
1/2 0
det i = 1/4
2x - y + 2z = 0 -1/2 1/2
0 -1/2
que é a equação do plano π. det j = 1/4
1/2 -1/2
Como foi dito no início deste -1/2 1/2
capítulo, uma reta é conhecida a partir do det k = 1/2
-1/2 -1/2
conhecimento de dois de seus pontos.
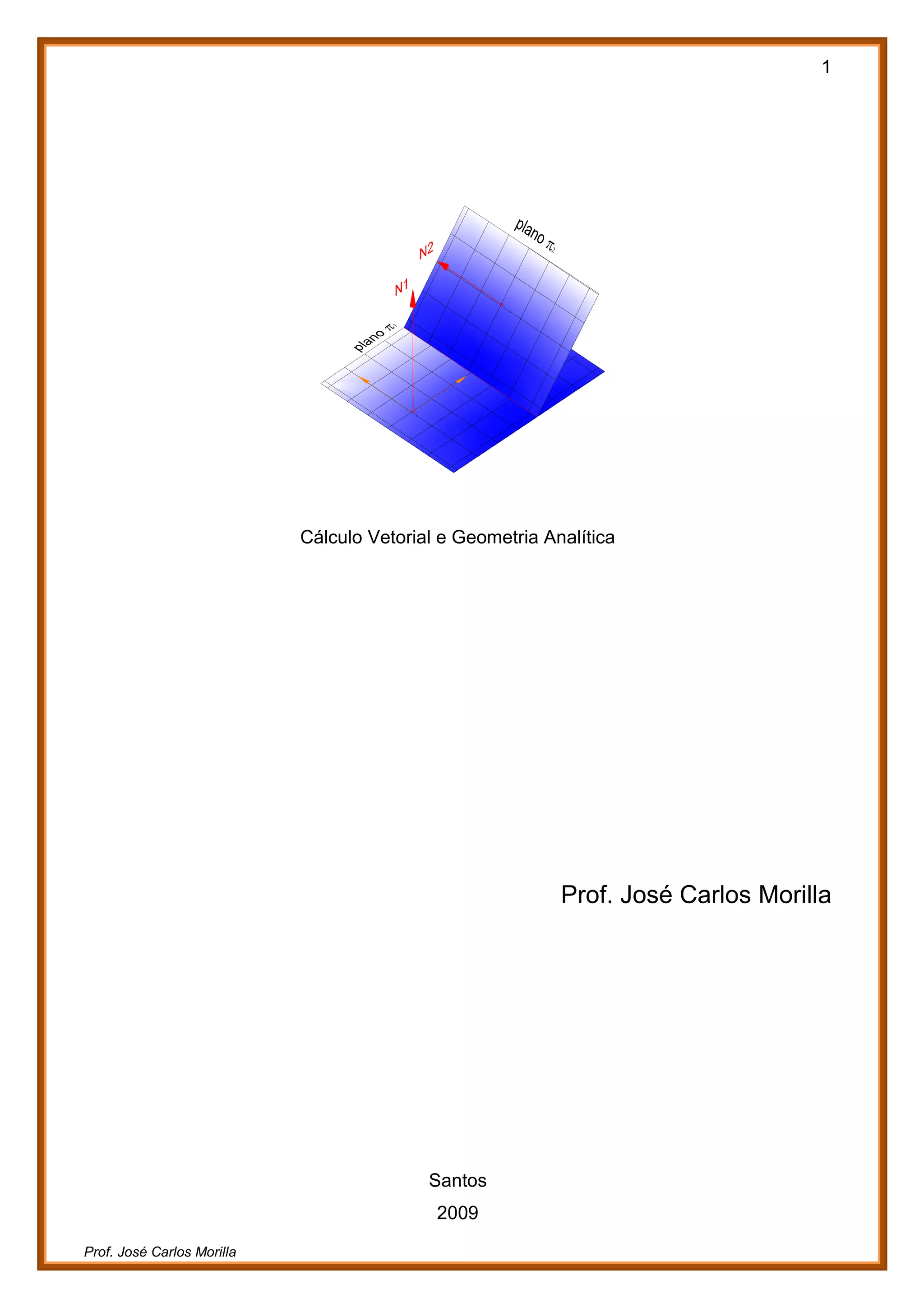
De forma análoga, um plano é Sabendo-se que o vetor N é normal
determinado se forem conhecidos três de
ao plano que contem os vetores P1 P2 e
seus pontos que não são colineares.
Assim, dados três pontos P1, P2 e P3, é P1 P3 , a equação do plano é dada por:
possível construir os vetores P1 P2 e
ax + by + cz + d = 0
P1 P3 . Com estes vetores é possível, por
meio do produto vetorial, encontrar o onde a = ¼; b = ¼ e c = ½. Assim, a
vetor normal ao plano (N . equação do plano fica:
Sejam, por exemplo, os pontos ¼x + ¼y + ½z + d = 0
P1=(1/2,0,0); P2=(0,1/2,0) e P3=(0,
-1/2,1/2). Com estes pontos construímos Para determinar o coeficiente d,
os vetores: vamos usar o fato de que P1=(1/2,0,0)
1 1 pertence ao plano π se suas
P1 P2 = 0- , -0,0-0
2 2 coordenadas satisfazem a equação de π;
isto é:
1 1
P1 P2 = - , ,0
2 2 ax + by + cz + [-(ax1 + by1 + cz1)] = 0
1 1 1 ¼x + ¼y + ½z + [-(¼ ½ + ¼ 0 + ½ 0)] = 0
P1 P3 = 0- ,- -0, -0
2 2 2
¼x + ¼y + ½z -1/8 = 0
1 1 1
P1 P3 = - ,- ,
2 2 2 que multiplicando por 8, fornece a
equação do plano π:
O vetor N obtido pelo produto
vetorial entre P1 P2 e P1 P3 é: 2x + 2y + 4z -1 = 0
Outra maneira de encontrar a
N = P1 P2 P1 P3
equação do plano π é lembrar que o
1 1 1 1 1 produto misto de três vetores que estão
N = - , ,0 - ,- , no mesmo plano é igual a zero. Desta
2 2 2 2 2 forma, considerando um ponto P de
coordenadas (x, y, z) pertencente ao
mesmo plano dos vetores P1 P2 e P1 P3,
Prof. José Carlos Morilla](https://image.slidesharecdn.com/0233-apostila-geometria-111021094912-phpapp01/85/0233-apostila-geometria-31-320.jpg)

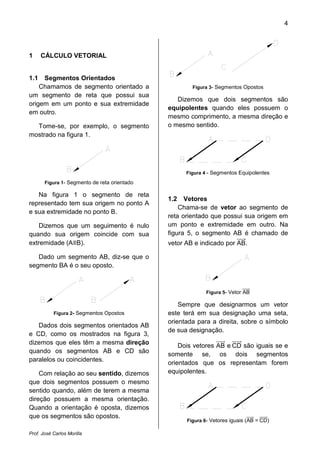
![33
Com esta montagem vemos que o vetores da base → i j k
plano π contém o ponto P0 = (0; 0; 1) e é componentes de v → 1 7 -5
paralelo aos vetores v=(1; 0; 0) e w=(0; 1; componentes de w → -1 -14 2
0).
Para uma base ortonormal i, j, k , As componentes do vetor N
o plano π, fica: resultante são dadas por:
7 -5
det i = -56
-14 2
-5 1
det j=3
2 -1
1 7
det k = -7
-1 -14
Sabendo-se que o vetor N é normal
ao plano que contem os vetores P1 P2 e
P1 P3 , a equação do plano é dada por:
ax + by + cz + d = 0
Figura 43
onde a = -56; b = 3 e c = -7. Assim, a
equação do plano fica:
A partir das equações para
métricas, é possível fornecer a equação -56x + 3y - 7z + d = 0
vetorial do plano π. Vamos tomar, por
Para determinar o coeficiente d,
exemplo, o plano π que tem as seguintes vamos usar o fato de que P1=(-6,-1,4)
equações paramétricas: pertence ao plano π se suas
coordenadas satisfazem a equação de π;
x= -6 + t- s isto é:
y = - 1 + 7t - 14s
z = 4 - 5t + 2s ax + by + cz + [-(ax1 + by1 + cz1)] = 0
Uma maneira de fornecer a
-56x + 3y - 7z + [-(-56 -6 + 3 (-1) - 7 4)] = 0
equação vetorial do plano π é lembrar
que o plano passa pelo ponto
-56x + 3y - 7z -305 = 0
P1 = (-6;-1;4) e é paralelo aos vetores
v=(1; 7; -5) e w=(-1; -14; 2). Com isto Lembrando que outra maneira de
podemos escrever: encontrar a equação do plano π é
lembrar que o produto misto de três
X =(-6;-1;4) + t(1; 7; -5) + s(-1; -14; 2) vetores que estão no mesmo plano é
igual a zero e considerando um ponto
Ainda, com essas equações P1 = (-6;-1;4) pertencente ao mesmo
paramétricas e sabendo que o plano
plano dos vetores v = (1; 7; -5) e w = (-1;
passa pelo ponto P1 = (-6;-1;4) e é -14; 2), podemos definir um terceiro vetor
paralelo aos vetores v=(1; 7; -5) e w=(-1;
t, cujas coordenadas são:
v w:
-14; 2), podemos fazer o produto vetorial
t= x+6, y+1,z-4
Prof. José Carlos Morilla](https://image.slidesharecdn.com/0233-apostila-geometria-111021094912-phpapp01/85/0233-apostila-geometria-33-320.jpg)










1) O documento apresenta os conceitos fundamentais de cálculo vetorial e geometria analítica, incluindo definições de vetores, operações entre vetores, dependência e independência linear, produtos escalar e vetorial. 2) São apresentadas as noções de segmentos orientados, vetores, soma, diferença e produto de vetores por escalares. 3) Também são definidos os conceitos de base, mudança de base, ângulo entre vetores, produtos escalar e vetorial, equações de retas e planos em geometria analítica.