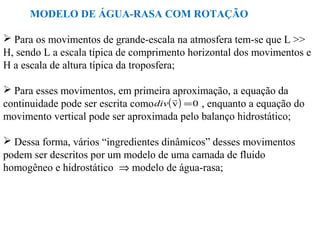
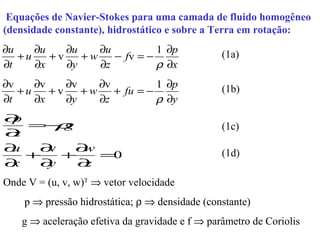
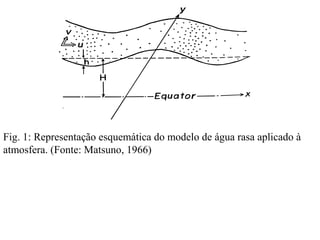
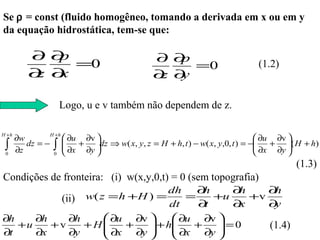
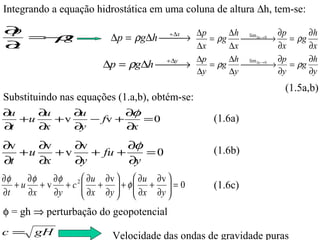
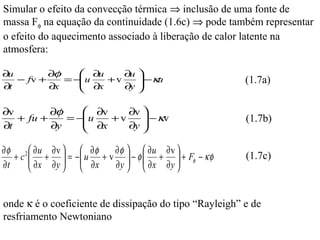
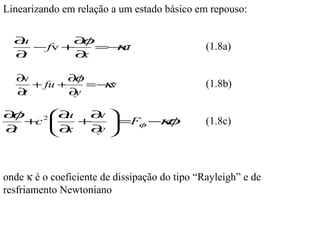
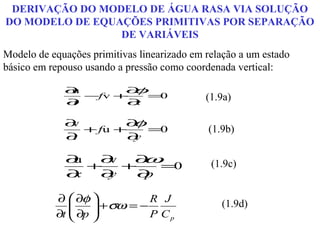
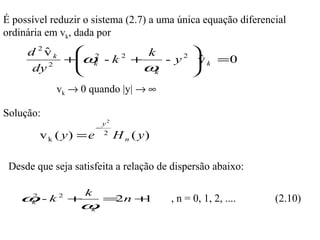
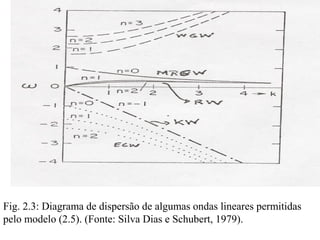
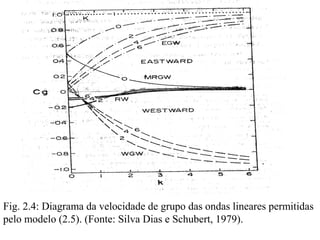
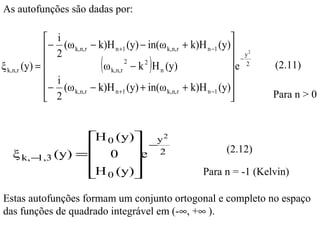
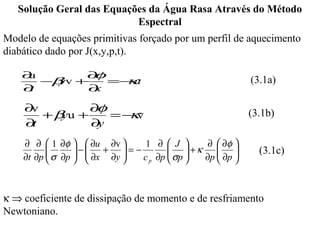
O documento apresenta um mini-curso sobre dinâmica atmosférica. Introduz o modelo de água rasa para descrever os movimentos de grande escala na atmosfera, considerando a aproximação hidrostática e a rotação da Terra. Deriva as equações do modelo a partir das equações de Navier-Stokes para um fluido homogêneo sobre um planeta em rotação. Discute a inclusão de termos convectivos e dissipativos nas equações.
![É conveniente transformar as equações para a forma adimensional,
utilizando as escalas:
1 1
[L ] = c
[T ] = 1
2 2
(2.3)
β cβ
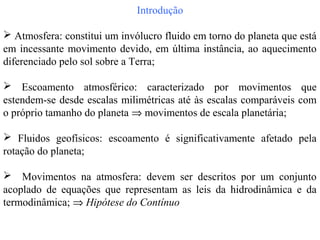
Fig. 2.1: Número de unidades de tempo adimensionais por dia (escala da
esquerda) ou escala de tempo [T] em dias (escala da direita) como
função de c = (gH)1/2. (Fonte: Silva Dias e Schubert, 1979)](https://image.slidesharecdn.com/xxivjftraupp-120812124043-phpapp02/85/Xxivjft-raupp-22-320.jpg)
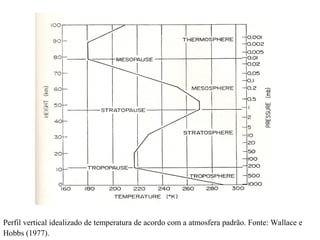
![Fig. 2.2: Número de unidades de comprimento adimensionais por
1000Km (escala da esquerda) ou escala de comprimento [L] em
quilômetros (escala da direita) como função de c = (gH)1/2. (Fonte: Silva
Dias e Schubert, 1979)](https://image.slidesharecdn.com/xxivjftraupp-120812124043-phpapp02/85/Xxivjft-raupp-23-320.jpg)
![Na forma vetorial:
(iωkI + Ωk)ξk = 0 (2.8)
k ⇒ número de onda zonal
ξk = [uk, vk, φk]T ⇒ autovetor
ωk ⇒ freqüência temporal (autovalor)
0 −y ik
d
Ω =y 0 (2.9)
k
dy
d Operador linear (anti-
ik 0 hermitiano)
dy
](https://image.slidesharecdn.com/xxivjftraupp-120812124043-phpapp02/85/Xxivjft-raupp-26-320.jpg)

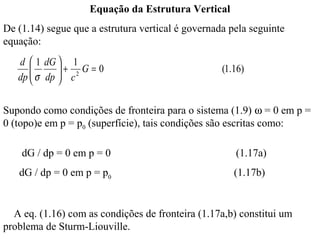
![Substituindo (3.2) em (3.1), multiplicando as equações resultantes por
Gm(p), usando a equação da estrutura vertical (1.16) para cada um dos
modos verticais, integrando as equações resultantes no intervalo [0,p0] e
usando a ortogonalidade das autofunções Gj(p) obtém-se:
∂u j ∂φ j
− βyv j + = −κu j (3.4a)
∂t ∂x
∂ j
v φ
∂ j
+β j +
yu κ
=− v j (3.4b)
∂t ∂y
∂φ j ∂u j ∂v j
+c 2
∂x
j + = c 2 ( q j − κφ j )
j (3.4c)
∂t ∂y ](https://image.slidesharecdn.com/xxivjftraupp-120812124043-phpapp02/85/Xxivjft-raupp-37-320.jpg)
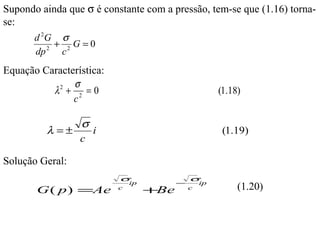
![Escrevendo na forma adimensional, usando as mesmas escalas usadas
anteriormente:
∂ξ
+Ω = F −κ
ξ ξ (3.5)
∂t
Onde ξ = [u(x,y,t), v(x,y,t), φ(x,y,t)]T
∂
0 −y
∂x
∂
Ω= y 0 (3.6)
∂y
∂ ∂
0
∂x
∂y
F = [0, 0, Fφ]T com Fφ = q (c5β)-1/2 (3.7)](https://image.slidesharecdn.com/xxivjftraupp-120812124043-phpapp02/85/Xxivjft-raupp-38-320.jpg)
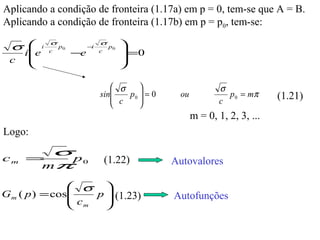
![Dado que as autofunções ξk,n,r(y) formam um conjunto ortogonal e
completo em (-∞<y<∞)e que as funções trigonométricas complexas eikx
formam um conjunto ortogonal e completo no intervalo [-Lx,Lx]:
+∞ ∞ 3
G ( x, y , t ) = ∑∑∑g k , n , r (t )ξk , n , r ( y )e ikx
k =− n =− r =
∞ 1 1
/ (3.8)
gk,n,r(t) = < Gk(y,t) • ξk,n,r(y)> (3.9) , onde
+∞
G k ( y, t ) • ξ k ,n ,r ( y ) = ∫ (g
−∞
1k )
( y, t )u k*,n,r ( y ) + g 2 k ( y, t ) v k ,n,r ( y ) + g1k ( y, t )u k*,n,r ( y ) + g 3k ( y, t )φ k*,n,r ( y ) dy
(3.10)
Lx
1
Gk ( y, t ) =
Lx ∫ G ( x, y, t )e −ikx dx
−L x
(3.11)](https://image.slidesharecdn.com/xxivjftraupp-120812124043-phpapp02/85/Xxivjft-raupp-39-320.jpg)
![Dessa forma, as variáveis de estado e a forçante podem ser expressas por
suas respectivas expansões em série:
+∞ ∞ 3
ξ(x,y,t) = ∑ ∑ ∑ ck,n,r(t) ξk,n,r(y)eikx
k =−∞n=−1r =1
(3.12)
+∞ ∞ 3
F(x,y,t) = ∑ ∑ ∑ fk,n,r(t) ξk,n,r(y)eikx
k =−∞ n=−1r =1
Substituindo a equação (3.12) em (3.5), multiplicando escalarmente por
ξ*s,m,l(y)e-isx , integrando a expressão obtida no domínio todo e usando a
relação (2.8) e a ortogonalidade das autofunções ξk,n,r(y)eikx no domínio
[-Lx,Lx] X (-∞<y<∞):
dck ,n ,r (t )
− iωk ,n ,r ck ,n ,r (t ) = f k ,n ,r (t ) − κck ,n ,r (t ) (3.13)
dt
para cada k, n, r.](https://image.slidesharecdn.com/xxivjftraupp-120812124043-phpapp02/85/Xxivjft-raupp-40-320.jpg)
![A solução geral é dada por:
t
+ ∫ f k ,n ,r ( s)e
( i ω k , n , r −κ ) t − ( iω k , n , r −κ )( s − t )
c k ,n ,r (t ) = c k ,n ,r (0)e ds (3.14)
0
Previsão de tempo Previsão climática
No caso de uma forçante estacionária, a solução é dada por:
ck ,n ,r (t ) = ck ,n ,r (0)e
( iωk ,n ,r −κ ) t
+
f k ,n,r
[iω k ,n ,r −κ]
[e ( iω k ,n , r − κ ) t
−1] (3.15)](https://image.slidesharecdn.com/xxivjftraupp-120812124043-phpapp02/85/Xxivjft-raupp-41-320.jpg)
![SILVA DIAS, P.L.; W. H. SCHUBERT. The dynamics of equatorial mass-flow
adjustment. Atmospheric Science Paper No. 312 (Department of Atmospheric Science
Colorado State University), Fort Collins, Colorado, USA, 1979.
RAUPP, C. F. M. (2002). Efeitos de processos não lineares na influência inter-
hemisférica de fontes de calor. São Paulo, 2002. p. [Dissertação de Mestrado. Instituto de
Astronomia, Geofísica e Ciências Atmosféricas/Universidade de São Paulo].
MATSUNO, T. Quasi-geostrophic motions in the equatorial area. J. Meteor. Soc.
Japan, 44, 25-43, 1966.
John M. Wallace & Peter V. Hobbs. Atmospheric Science. First Edition: An
Introductory Survey, Editora: Academic Press, 1a edição (1977)](https://image.slidesharecdn.com/xxivjftraupp-120812124043-phpapp02/85/Xxivjft-raupp-52-320.jpg)
























































