Baixar para ler offline





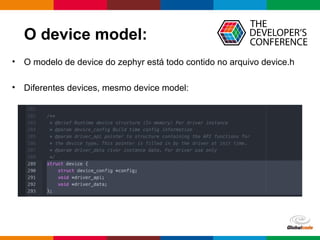
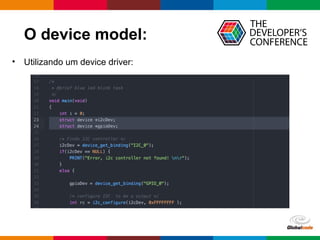

O documento apresenta o sistema operacional Zephyr, desenvolvido para dispositivos embarcados. É descrito como o Zephyr oferece um kernel de tempo real leve e escalável através de sua arquitetura de nanokernel e microkernel. Além disso, são demonstrados recursos como threads, sincronismo, drivers de dispositivos e como configurar e compilar aplicações para rodar no Zephyr.






























































































![metodologias-ativas-de-aprendizagem.pptx_(1)[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/metodologias-ativas-de-aprendizagem-260204140054-ff555186-thumbnail.jpg?width=640&height=640&fit=bounds)




