Transferir como PDF, PPTX


![Globalcode – Open4education
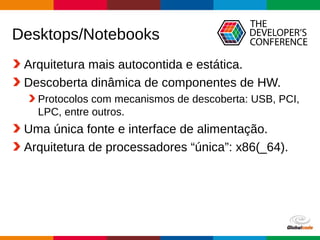
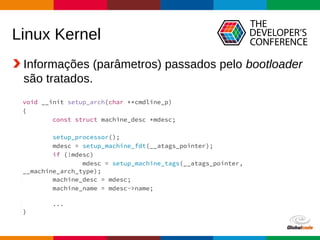
DTS vs FEX
Device Tree Source FEX (Allwinner)
uart4: serial@49042000 {
compatible = "ti,omap3-uart";
reg = <0x49042000 0x400>;
interrupts = <80>;
dmas = <&sdma 81 &sdma 82>;
dma-names = "tx", "rx";
ti,hwmods = "uart4";
clock-frequency = <48000000>;
};
[uart_para4]
uart_used = 0
uart_port = 4
uart_type = 2
uart_tx =
port:PH04<4><1><default><default>
uart_rx =
port:PH05<4><1><default><default>](https://image.slidesharecdn.com/bruno-meneguele-tdc2016-160721185113/85/TDC2016SP-Trilha-Linux-Embarcado-25-320.jpg)


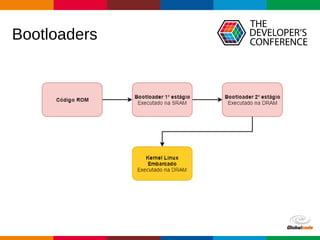
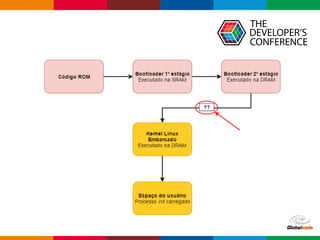
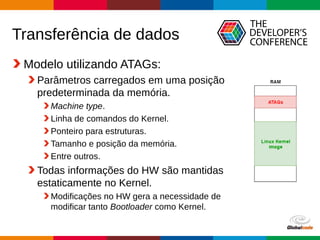
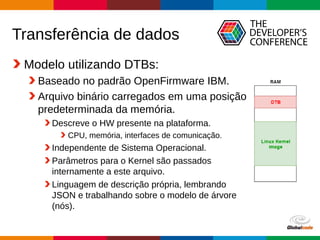
O documento discute o processo de inicialização de plataformas embarcadas com Linux, incluindo o papel dos bootloaders e como eles transferem informações sobre o hardware para o kernel. Primeiro, explica as diferenças entre PCs e plataformas embarcadas. Em seguida, descreve como os bootloaders inicializam o sistema e carregam o kernel, bem como os tipos de informações que podem ser passadas, como ATAGs ou Device Tree Blobs. Por fim, discute as vantagens do modelo baseado em Device Tree sobre outros métodos.































































































