Baixar para ler offline


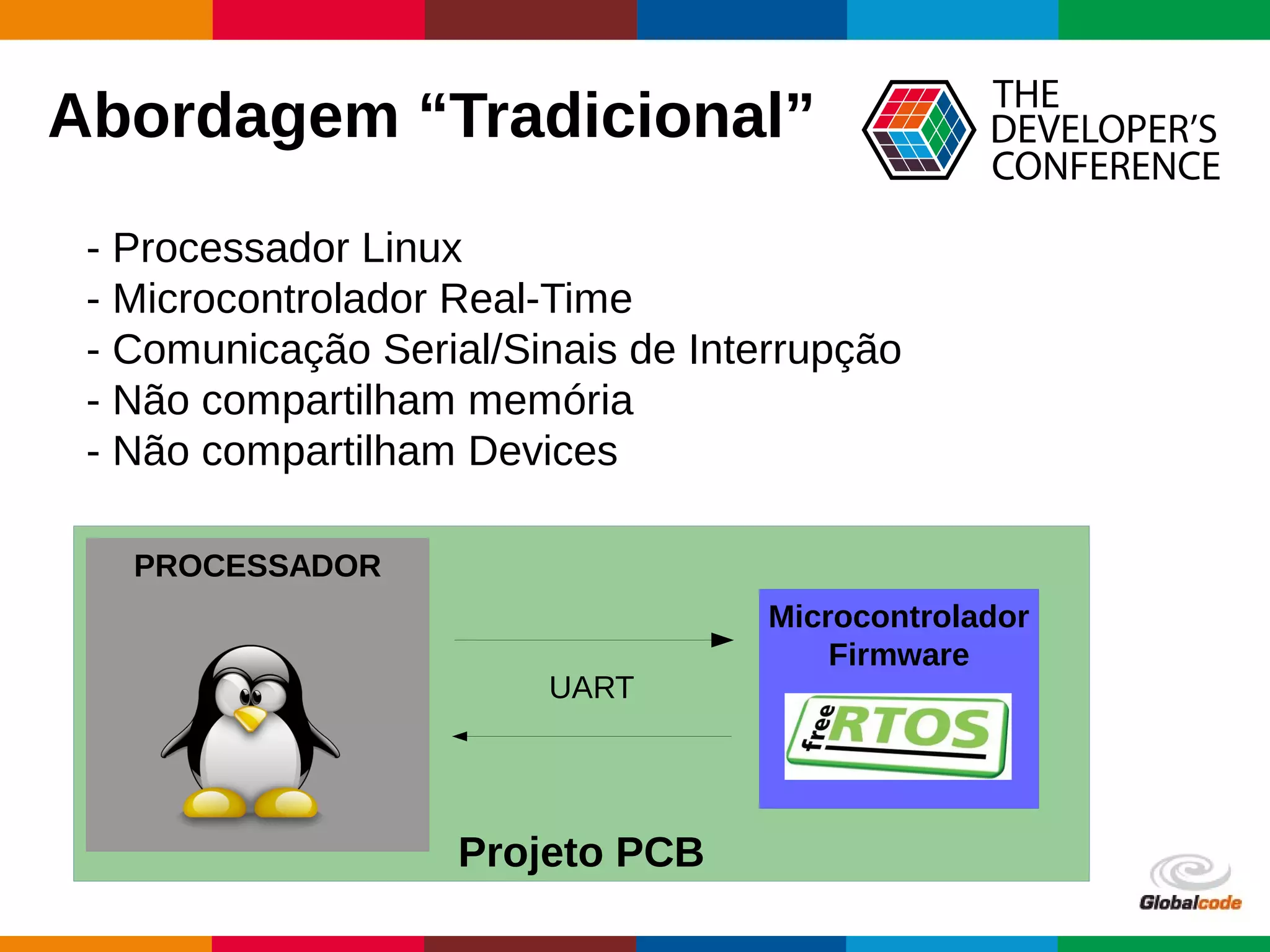
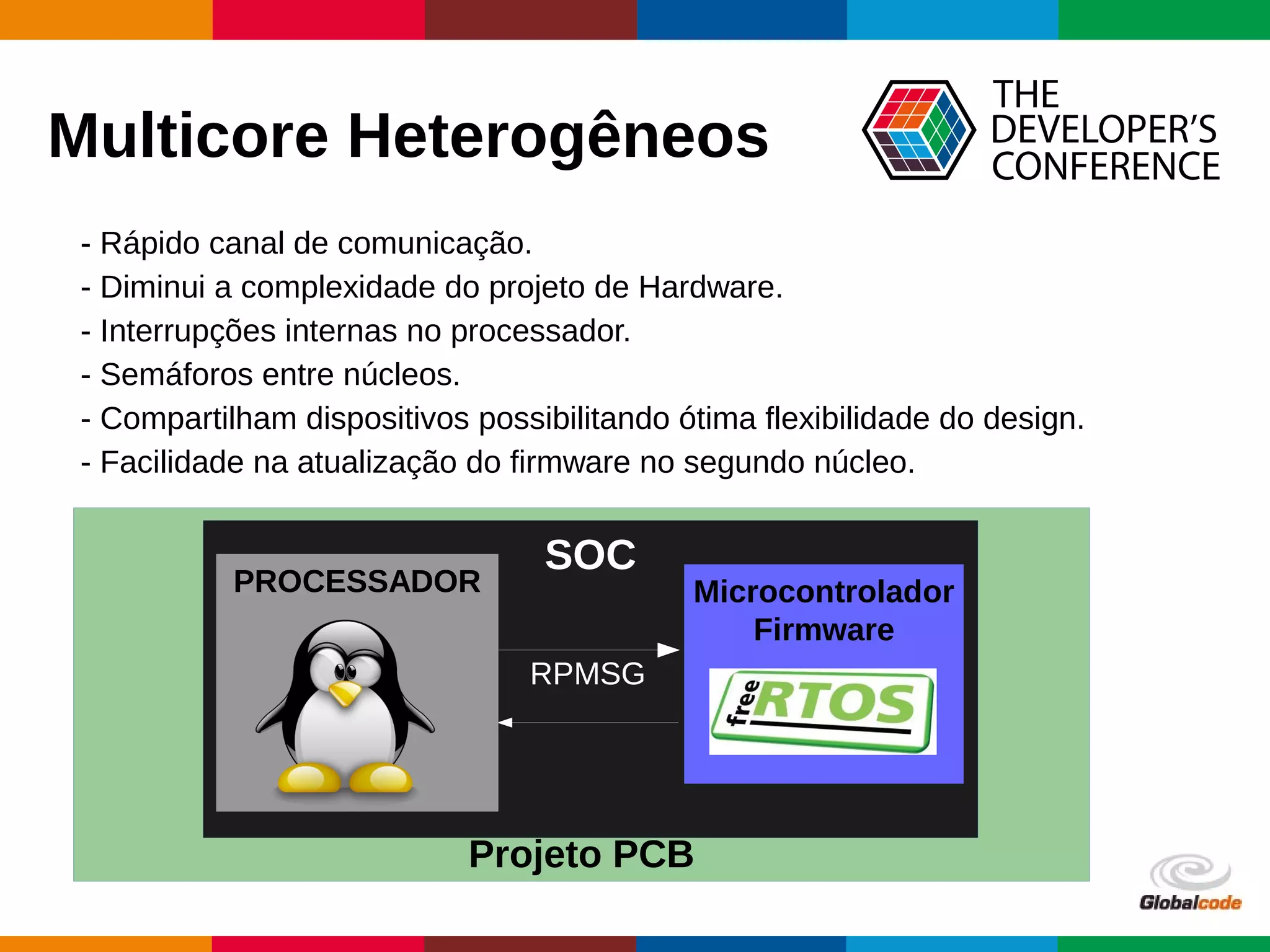
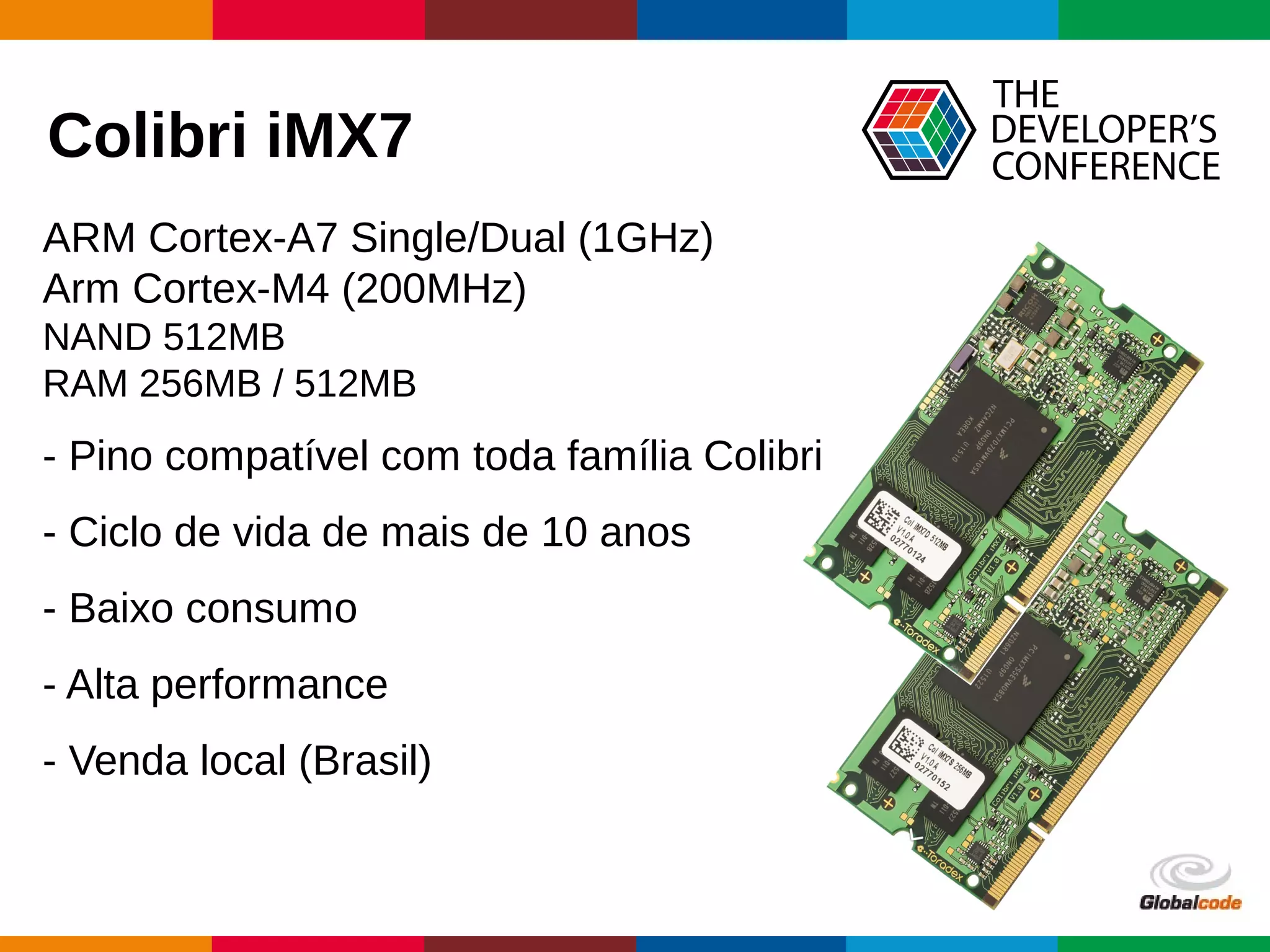
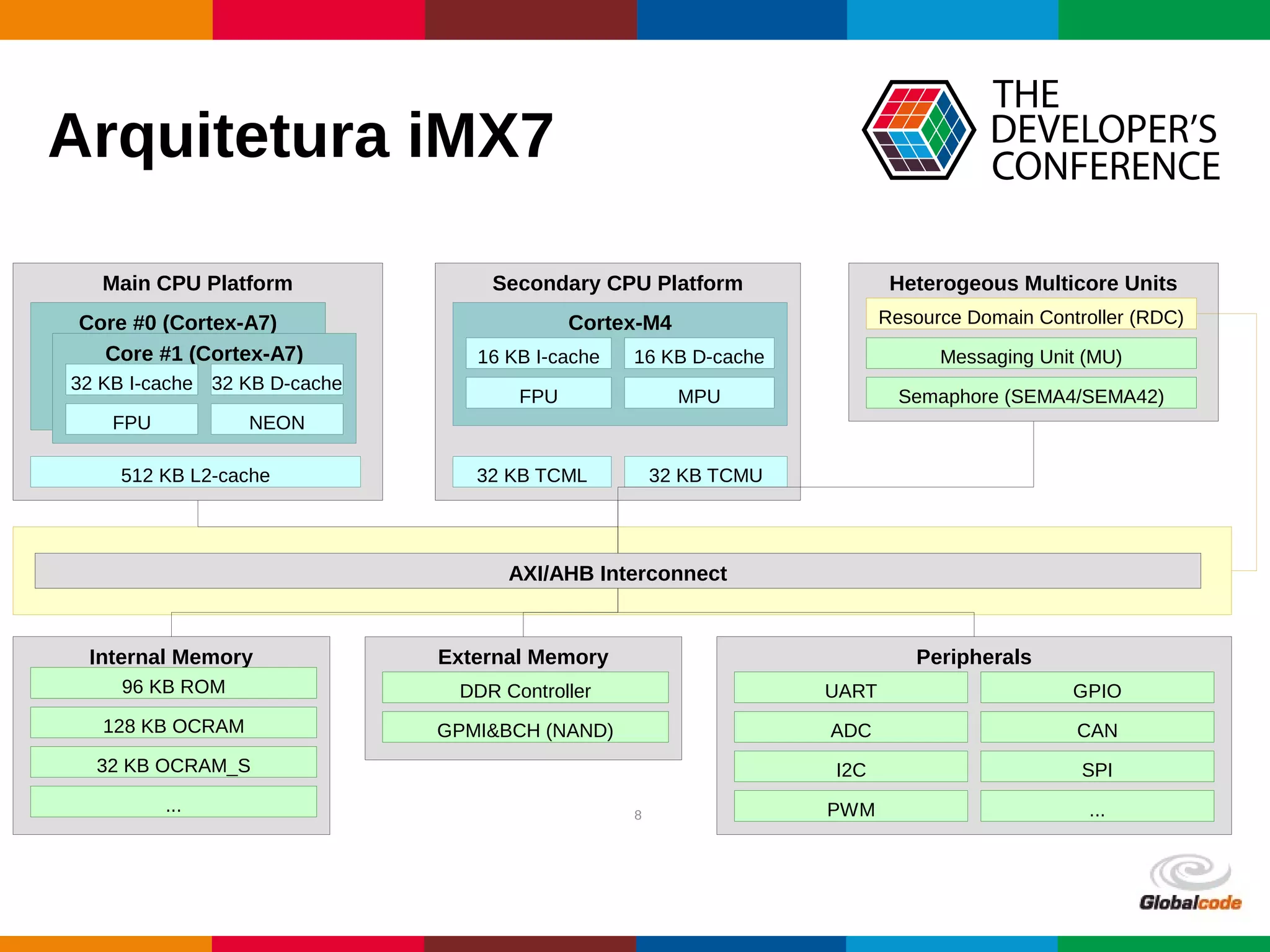
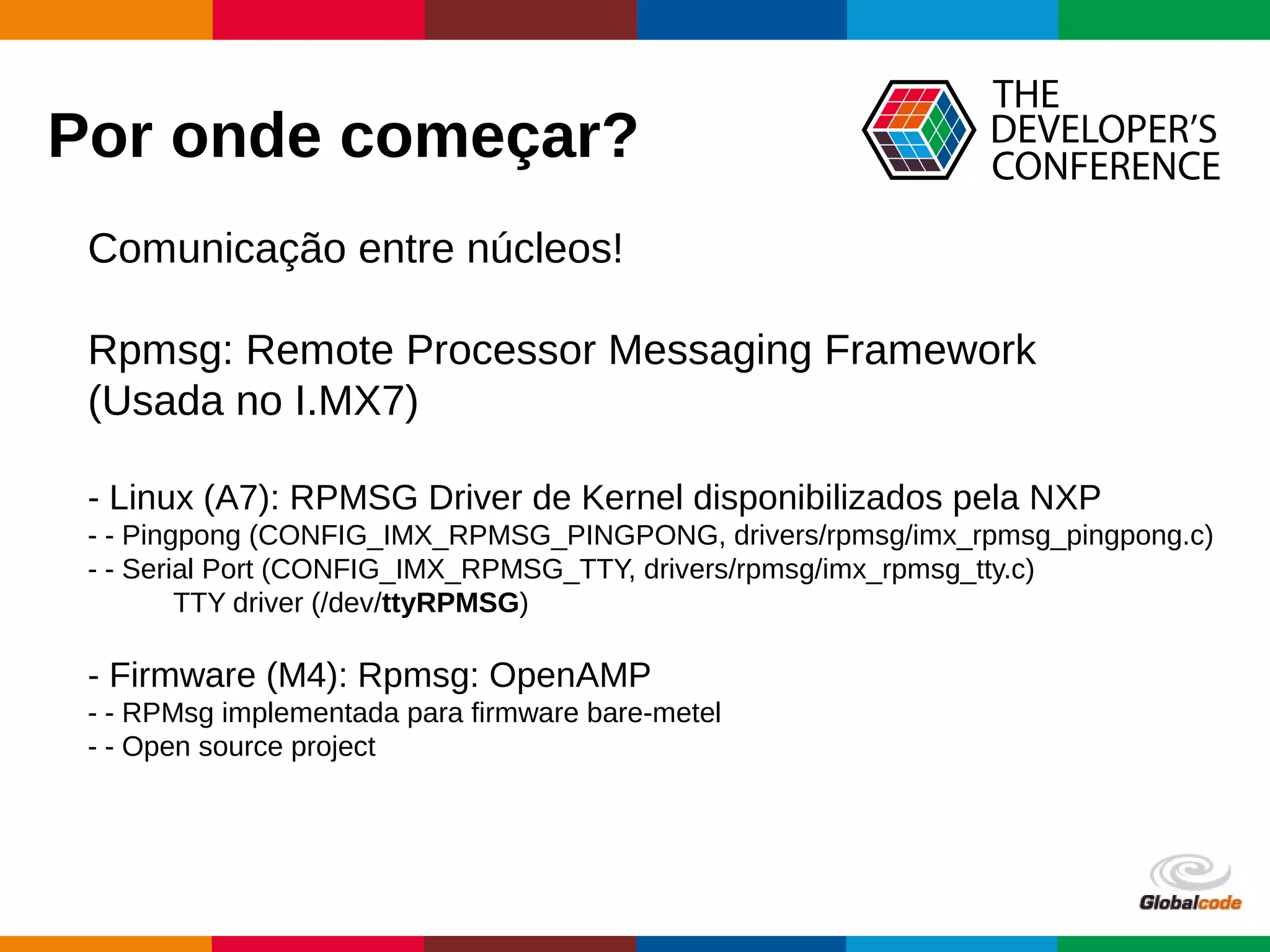

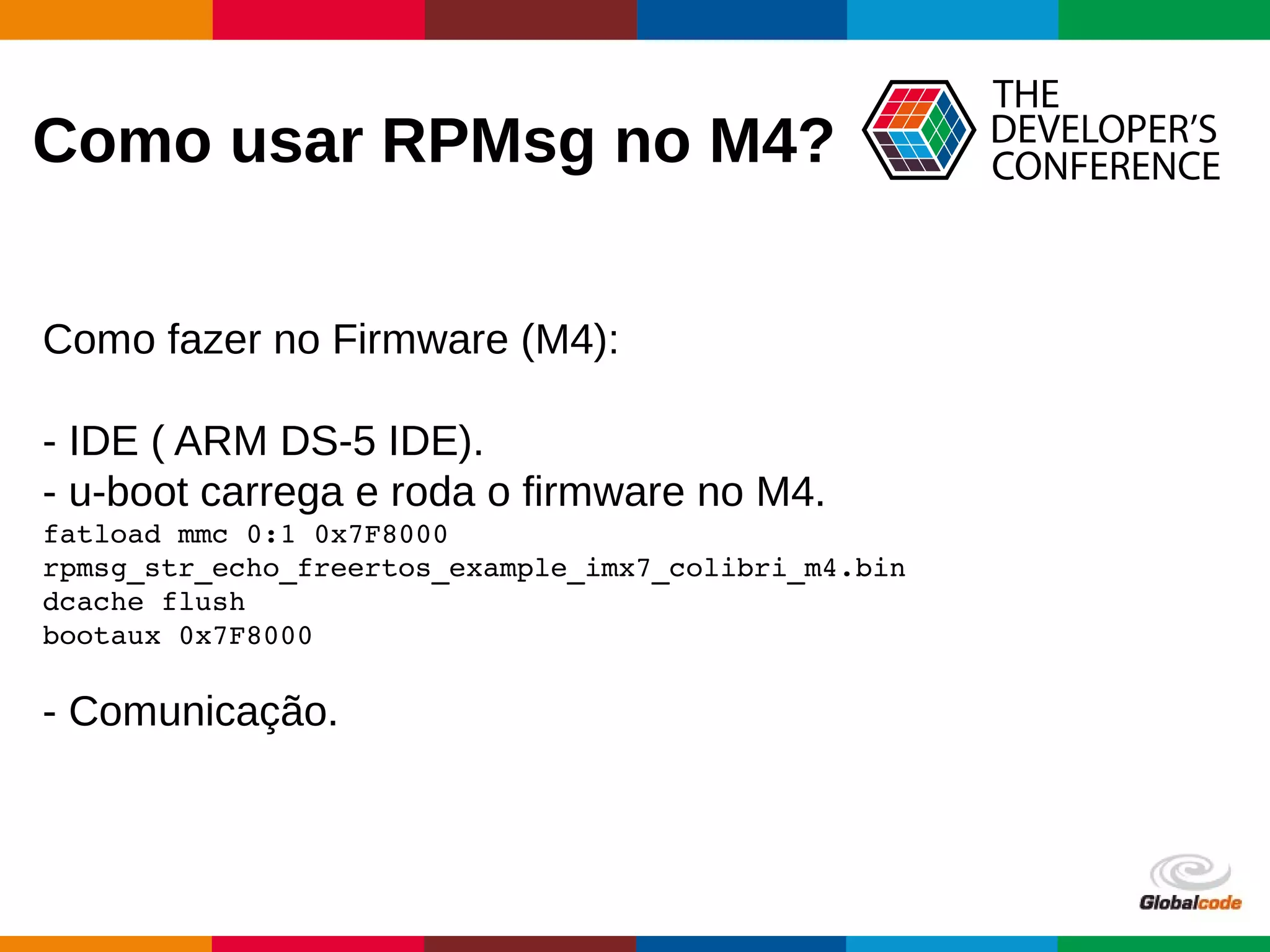
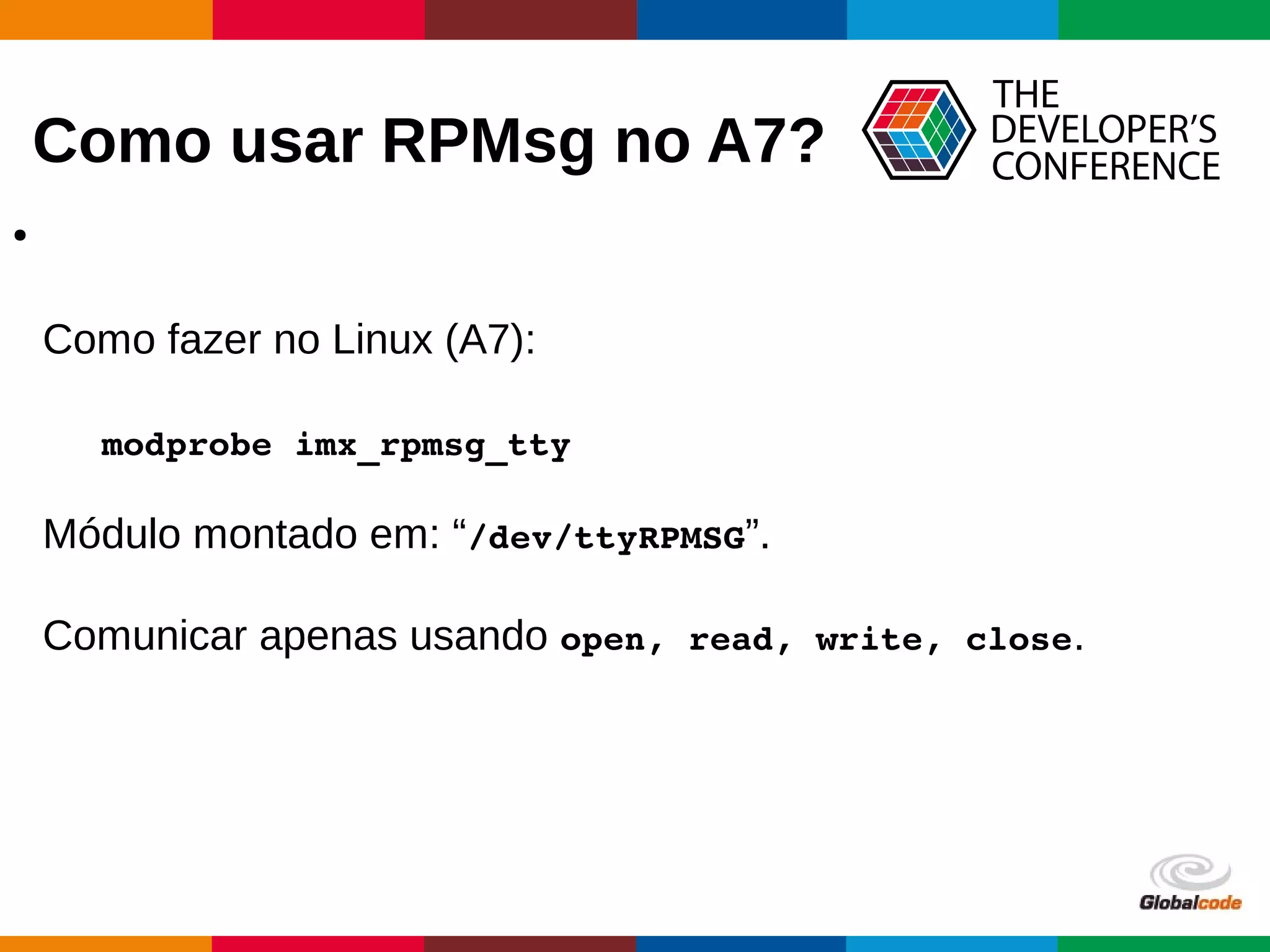
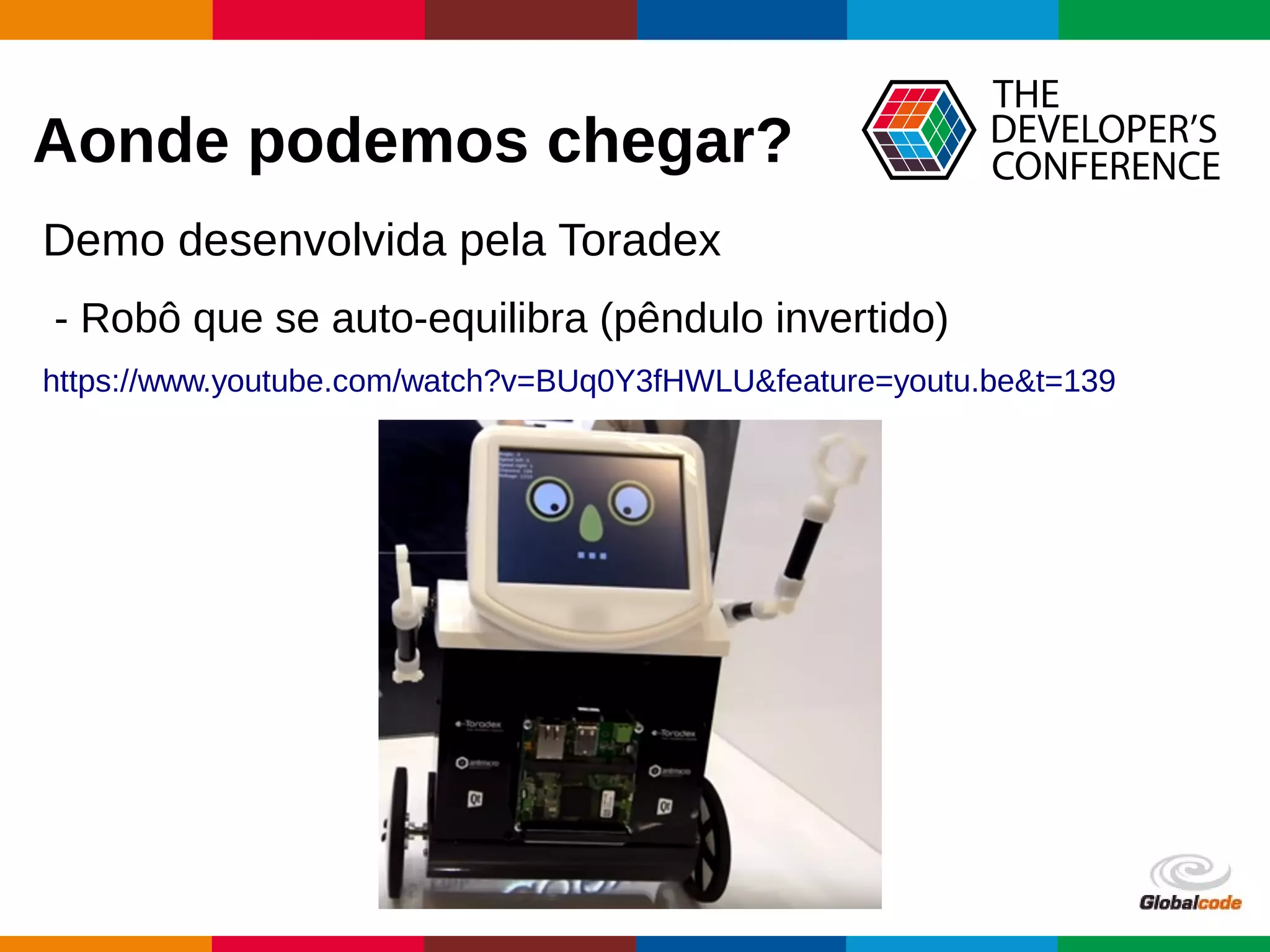

O documento discute novas técnicas de controle em tempo real em sistemas Linux com processadores multicore heterogêneos, comparando abordagens tradicionais com arquiteturas SOC que permitem comunicação rápida entre núcleos através do RPMSG. Apresenta também um projeto de um robô de equilíbrio que utiliza um processador Colibri iMX7 com núcleos ARM Cortex-A7 e Cortex-M4 para controle em tempo real.



![[4/9] Sistemas embarcados de alto desempenho para tratamento e processamento ...](https://cdn.slidesharecdn.com/ss_thumbnails/03-cubeworkbench-171031095316-thumbnail.jpg?width=640&height=640&fit=bounds)


![[6/9] Sistemas embarcados de alto desempenho para tratamento e processamento ...](https://cdn.slidesharecdn.com/ss_thumbnails/05-cmsis-171031095533-thumbnail.jpg?width=640&height=640&fit=bounds)




![[3/9] Sistemas embarcados de alto desempenho para tratamento e processamento ...](https://cdn.slidesharecdn.com/ss_thumbnails/02-stm32f7-p1-171031095110-thumbnail.jpg?width=640&height=640&fit=bounds)



![[2/9] Sistemas embarcados de alto desempenho para tratamento e processamento ...](https://cdn.slidesharecdn.com/ss_thumbnails/01-cortexm-171031094440-thumbnail.jpg?width=640&height=640&fit=bounds)








![[7/9] Sistemas embarcados de alto desempenho para tratamento e processamento ...](https://cdn.slidesharecdn.com/ss_thumbnails/06-stm32f7-p2-171031095616-thumbnail.jpg?width=640&height=640&fit=bounds)
![[5/9] Sistemas embarcados de alto desempenho para tratamento e processamento ...](https://cdn.slidesharecdn.com/ss_thumbnails/04-handsoncomled-171031095419-thumbnail.jpg?width=640&height=640&fit=bounds)