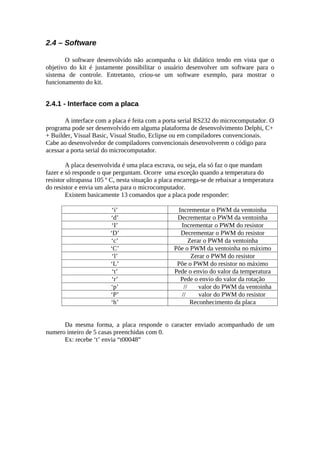
O documento descreve o desenvolvimento de um kit didático para simular sistemas de instrumentação industrial e controle de processos. O kit inclui um resistor para simular um sistema termodinâmico, um sensor de temperatura e uma ventoinha controlada por PWM para simulação. Um microcontrolador controla o kit e se comunica com um computador via serial.





![#define ft
#define led
RB0
RB4
//Definições dos estados de máquina e valores constantes
#define EST_LE_TEMP 0
#define EST_PRC_ERR 1
#define EST_PWMC_INC 'i'
#define EST_PWMC_DEC 'd'
#define EST_PWMR_INC 'I'
#define EST_PWMR_DEC 'D'
#define EST_PWMC_MIN 'c'
#define EST_PWMC_MAX 'C'
#define EST_PWMR_MIN 'l'
#define EST_PWMR_MAX 'L'
#define EST_ENV_TEMP 't'
#define EST_ENV_ROT 'r'
#define EST_ENV_PWMC 'p'
#define EST_ENV_PWMR 'P'
#define EST_HND_SHKN 'h'
#define TEMP_MAX 210
#define TEMP_MIN 100
//para o valor real, dividir por 2
//variáveis globais
short erro = 0;
char buffer[8];
unsigned int sm = 0,sma = 0, pwm_c = 0, pwm_r = 0;
unsigned long int temp = 0, np = 0, rpm = 0;
//protótipos de subrotinas
void inicializa();
void processo();
void config_ad();
void config_pwm();
void comunica();
void config_io();
void reset_wdt();
void config_wdt();
void le_temp();
void config_timer1();
void config_interrupts();
void procura_erro();
void init_signal();
//interrupções
#INT_EXT
void trata_ext0()](https://image.slidesharecdn.com/relatrio-desenvolvimentodeumkitdidtico-140101133804-phpapp01/85/Relatorio-de-Projeto-Desenvolvimento-de-um-kit-didatico-para-disciplinas-de-Instrumentacao-e-Sistemas-de-Controle-12-320.jpg)








































![Cms%2 ffiles%2f5851%2f1468866044[vida+de+silício]+apostila+arduino+básico+vol...](https://cdn.slidesharecdn.com/ss_thumbnails/cms2ffiles2f58512f1468866044vidadesilcioapostilaarduinobsicovol-170312132639-thumbnail.jpg?width=640&height=640&fit=bounds)












