Baixar para ler offline











![30
O JNI é muito útil também quanto a questões de desempenho, como cita (Gabrilovich e
Finkelstein, 2001), segundo os autores o fato da API possuir boa flexibilidade, torna um fator
importante na hora de programar.
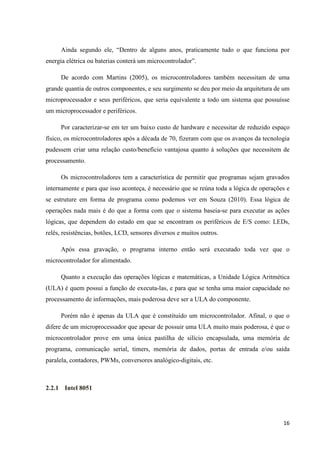
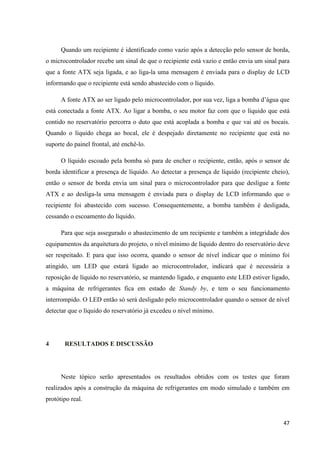
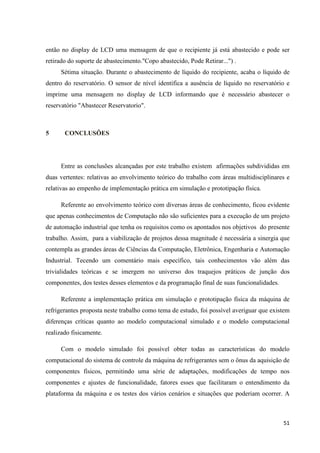
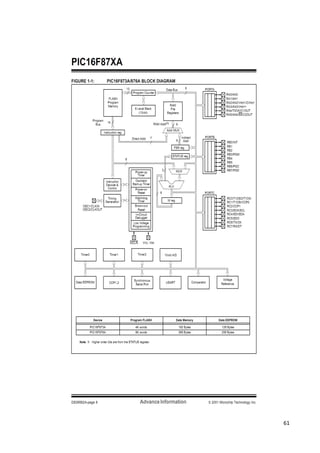
É possível, por exemplo, utilizar a linguagem C para escrever um programa com
métodos nativos, como demostra Austin; Pawlan (2000) no código fonte abaixo que por meio
de uma String recebe um nome como parâmetro (String name) e retorna o conteúdo em um
array:
2.7 AMBIENTE PARA PROGRAMAÇÃO
Para realizar a construção de um projeto de programação é necessário uma IDE, ou seja,
um ambiente de desenvolvimento que de suporte à linguagem que se deseja trabalhar. Os
IDEs (Integrated Development Environment), são ambientes de Desenvolvimento Integrado.
A seguir será feita uma breve explicação sobre algumas IDEs utilizadas no
desenvolvimento do presente trabalho.
(native byte[] loadFile(String name)).
import java.util.*;
class ReadFile {
//Native method declaration
native byte[] loadFile(String name);
//Load the library
static {
System.loadLibrary("nativelib");
}
public static void main(String args[]) {
byte buf[];
//Create class instance
ReadFile mappedFile=new ReadFile();
//Call native method to load ReadFile.java
buf=mappedFile.loadFile("ReadFile.java");
//Print contents of ReadFile.java
for(int i=0;i<buf.length;i++) {
System.out.print((char)buf[i]);
}
}
}](https://image.slidesharecdn.com/35a8d3e5-373d-44b8-ac8a-5878bef9d7cf-170118144832/85/Monografia_Raphael-Fernandes-Ribeiro_RA-A17809-0-35-320.jpg)








![66
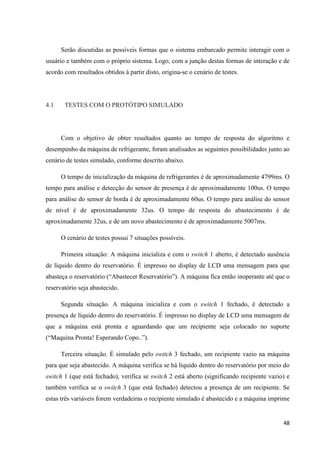
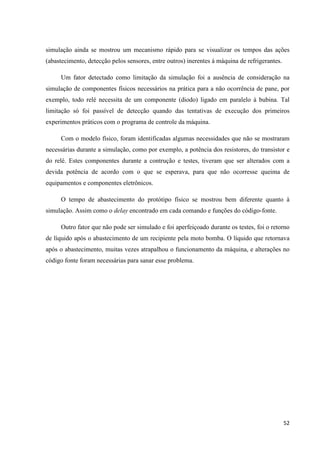
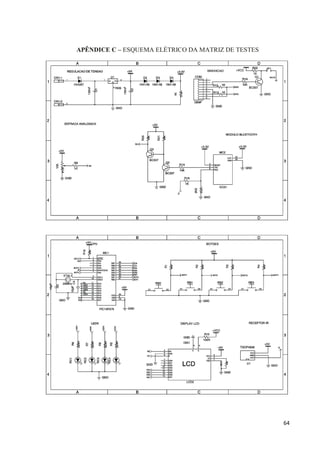
APÊNDICE E – CÓDIGO-FONTE COMPLETO
/* * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * *
*
* Trabalho de conclusão de curso apresentado ao
*
* Instituto de Ciências Exatas e Tecnologia (ICET)
*
*
*
* PROTÓTIPO DE MÁQUINA DE REFRIGERANTES BASEADO EM MICROCHIP PIC16f876A
*
* [Código Fonte desenvolvido em Linguagem C]
*
*
*
* Universidade Paulista - UNIP
*
* Nome: RAPHAEL FERNANDES RIBEIRO - RA: A178090
*
* Orientador: Prof. MsC. Mário Henrique de Souza Pardo
*
* Co-orientador: Prof. MsC. Sandro
*
*
*
* * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * *
*
* VERSÃO : 2.0
*
* DATA : 13/09/2011
*
* N° LINHAS: 462
*
* * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * *
*/
/* * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * *
*
* DESCRIÇÃO GERAL
*
* * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * *
*/
/* Este código irá automatizar o protótipo físico da máquina de
*
* refrigerantes.
*
* * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * *
*/
/* * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * *
*
* DEFINIÇÃO DE CABEÇALHO
*
* * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * *
*/
#include <16F876A.h> //Modelo do Microcontrolador utilizado.](https://image.slidesharecdn.com/35a8d3e5-373d-44b8-ac8a-5878bef9d7cf-170118144832/85/Monografia_Raphael-Fernandes-Ribeiro_RA-A17809-0-71-320.jpg)












Raphael Fernandes Ribeiro apresenta seu trabalho de conclusão de curso sobre um protótipo de máquina de refrigerantes automatizada utilizando um microcontrolador PIC16F876A. O trabalho descreve a construção do protótipo físico, incluindo a seleção de componentes e simulações realizadas.



























