Baixado 184 vezes

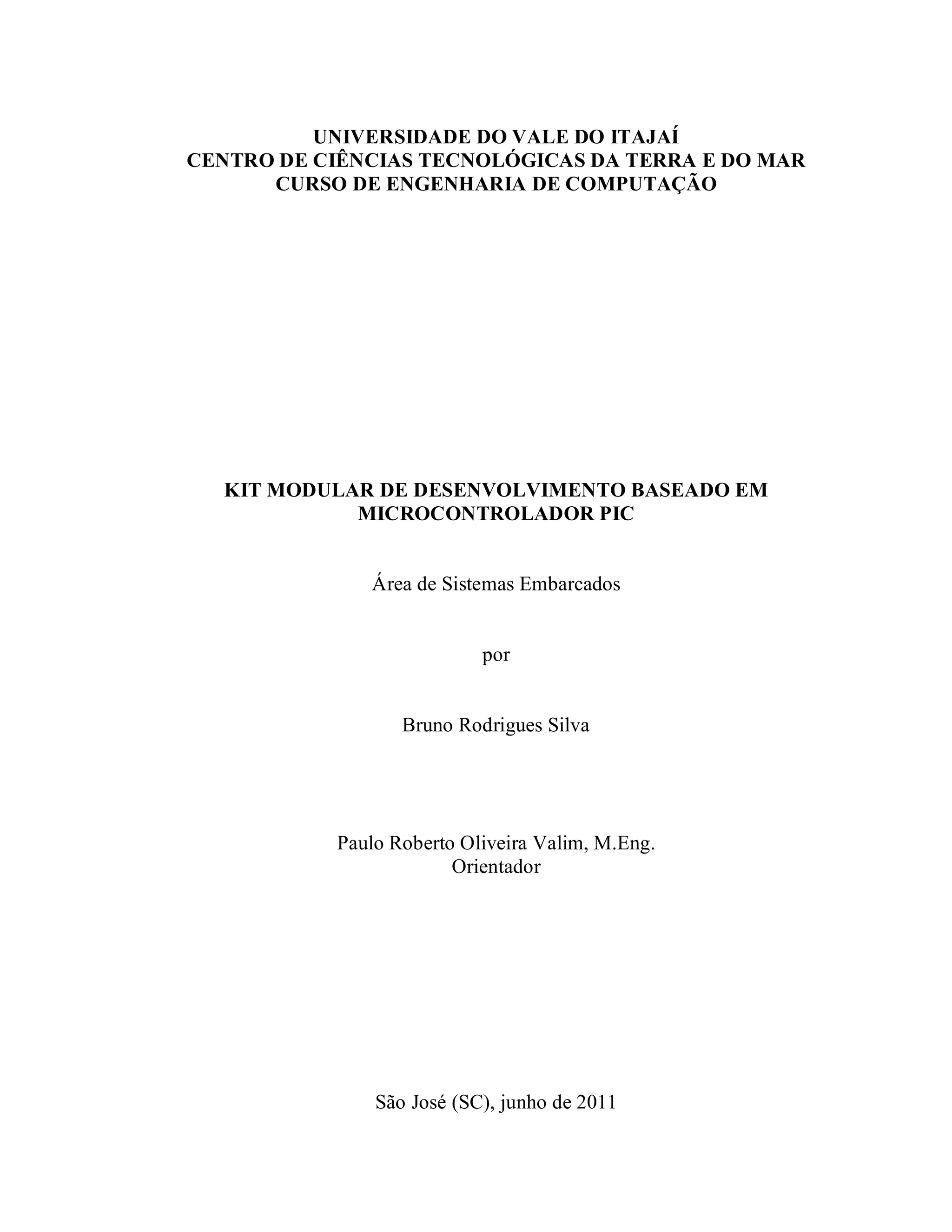































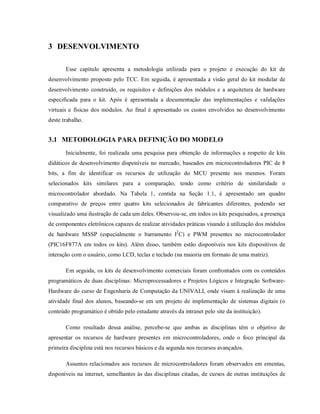
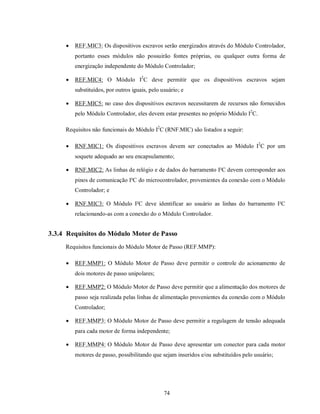
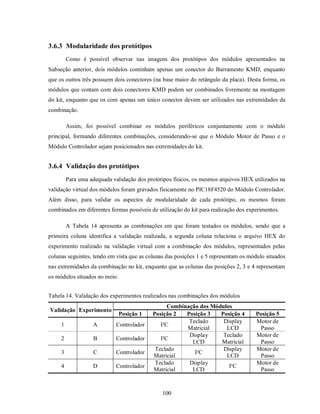
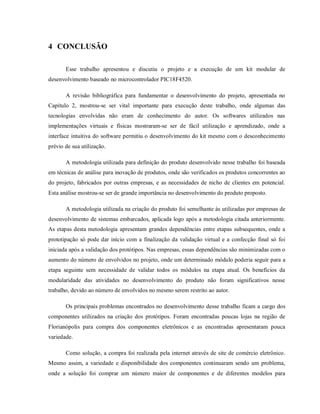
![Para Zanco (2007, p. 236), o modo PWM
é o modo de funcionamento mais poderoso do módulo CCP e pode ser utilizado em
diversas aplicações, como, por exemplo, conversor digital/analógico, fonte chaveada,
nobreaks, etc. O PWM, conhecido como Modulação por Largura de Pulso, é um sinal
digital com frequência fixa, mas largura de pulso (ciclo ativo) variável.
A frequência fixa do sinal digital é dada pelo inverso do período do PWM. A saída PWM é
produzida por até 10 bits de precisão do registrador CCPx, tendo como base o temporizador 2.
Sabendo-se que TMR2 é formado por 8 bits, Souza (2008, p. 168) complementa, “os 2 bits faltantes
serão adquiridos através do clock interno da máquina” e referindo-se as fases Q1 até Q4, “a divisão
do clock por 4 gera esses tempos internos, que são utilizados para incrementar o TMR2 e também
para controlar o PWM. Esses quatro tempos geram os 2 bits faltantes”. Desta forma o período do
PWM é determinado pela Equação 1, onde: PR2 representa o valor de estouro do temporizador 2,
TOSC o valor do inverso da frequência do oscilador do microcontrolador e TMR2prescale o valor do
fator prescale aplicado ao temporizador 2.
í = [( 2) + 1] ∗ 4 ∗ ∗ 2 Equação 1
A largura de pulso ou Duty Cycle (DC) é o tempo em que o sinal permanece em nível lógico
“1”. Ela é especificada por 10 bits, sendo os 8 bits mais significativos dados pelo registrador
CCPRxL e os 2 bits menos significativos pelos bits 5 e 4 do registrador CCPxCON (MICROCHIP
TECHNOLOGY, 2008). Assim sendo, o Duty Cycle do PWM é determinado pela Equação 2, onde
CCPRxL:CCPxCON[5:4] representa o valor determinado pela especificação citada dos 10 bit, TOSC
o valor do inverso da frequência do oscilador do microcontrolador e TMR2prescale o valor do fator
prescale aplicado ao temporizador 2.
=( : [5: 4]) ∗ 4 ∗ ∗ 2 Equação 2
A Microchip (2008, p. 145) recomenda os seguintes passos para operar o módulo CCP em
modo PWM:
1. Determine o período do PWM escrevendo o valor no registrador PR2;
2. Determine o Duty Cycle escrevendo o valor no registrador CCPRxL e nos bits 5 e 4 do
registrador CCPxCON;
37](https://image.slidesharecdn.com/tcciiversofinal-110901223859-phpapp02/85/Kit-Modular-de-Desenvolvimento-Baseado-em-Microcontrolador-PIC-52-320.jpg)









































![LABROSSE, J. J. Embedded Systems Building Blobks. San Francisco: CMP Books, 1999. cap. 3
e 5.
LABTOOLS. McLab 2 - 16F, 2010. Disponivel em:
<http://www.labtools.com.br/index.asp?area=21&subarea=b&idioma=por&script=produtos&prod=
192>. Acesso em: 15 ago. 2010.
MATIC, N. The PIC microcontrollers, for beginners too. [S.l.]: mikroElektronika, 2003.
Disponivel em: <http://www.mikroe.com/pt/product/books/picbook/>. Acesso em: 10 set. 2010.
MCCOMB, M. Stepper Motors Part 1: Types of Stepper Motors, 2007. Disponivel em:
<http://techtrain.microchip.com/webseminars/documents/StepMtrP1_091407.pdf>. Acesso em: 6
out. 2010.
MELO, F. É. N. D.; ZAPELINI, W. B. Um Equipamento Didático Constituído de Módulos de
Microcontrolador e de PLD, Florianópolis, 2003. 9p.
MESSIAS, A. R. Controle de motor de passo através da porta paralela, 2006. Disponivel em:
<http://www.rogercom.com/pparalela/IntroMotorPasso.htm>. Acesso em: 5 out. 2010.
MICROCHIP TECHNOLOGY. PIC18XXXX MCU Family Product Overview, Chandler,
dezembro 2003. Disponivel em:
<http://ww1.microchip.com/downloads/en/DeviceDoc/30327b.pdf>. Acesso em: 15 set. 2010.
MICROCHIP TECHNOLOGY. Data Sheet PIC16F5X, Chandler, p. 1-9, abril 2007. Disponivel
em: <http://ww1.microchip.com/downloads/en/DeviceDoc/41213D.pdf>. Acesso em: 15 set. 2010.
MICROCHIP TECHNOLOGY. Data Sheet PIC18F1220/1320, Chandler, p. 1-9, fevereiro 2007.
Disponivel em: <http://ww1.microchip.com/downloads/en/DeviceDoc/39605F.pdf>. Acesso em: 15
set. 2010.
MICROCHIP TECHNOLOGY. Data Sheet PIC18F2420/2520/4420/4520, Chandler, novembro
2008. Disponivel em: <http://ww1.microchip.com/downloads/en/DeviceDoc/39631E.pdf>. Acesso
em: 15 set. 2010.
MICROCHIP TECHNOLOGY. Data Sheet PIC16F627A/628A/648A, Chandler, p. 1-12, outubro
2009. Disponivel em: <http://ww1.microchip.com/downloads/en/DeviceDoc/40044G.pdf>. Acesso
em: 15 set. 2010.
MICROCHIP TECHNOLOGY. Data Sheet PIC16F/LF1826/27, Chandler, p. 1-15, junho 2010.
Disponivel em: <http://ww1.microchip.com/downloads/en/DeviceDoc/41391C.pdf>. Acesso em: 15
set. 2010.
MICROCHIP TECHNOLOGY. 8-bit PIC® Microcontroller Solutions, Chandler, agosto 2010.
Disponivel em: <http://ww1.microchip.com/downloads/en/DeviceDoc/39630g.pdf>. Acesso em: 15
set. 2010.
MICROCHIP TECHNOLOGY. Package Specification, Chandler, 2010. Disponivel em:
<http://www.microchip.com/stellent/groups/techpub_sg/documents/packagingspec/en012702.pdf>.
Acesso em: 15 set. 2010.
114](https://image.slidesharecdn.com/tcciiversofinal-110901223859-phpapp02/85/Kit-Modular-de-Desenvolvimento-Baseado-em-Microcontrolador-PIC-129-320.jpg)
![MICROGENIOS. Kit PICgenios PIC16F877A - Kit de Desenvolvimento Profissional Família
PIC16F, 2010. Disponivel em:
<http://www.microgenios.com/detalhes.asp?id=137&produto=467>. Acesso em: 15 ago. 2010.
NATIONAL SEMICONDUCTOR. MICROCONTROLADOR COP8™, Guadalajara, p. 17-23,
fevereiro 2001. Disponivel em: <www.national.com/appinfo/mcu/files/ManualDeUsuario.pdf>.
Acesso em: 8 set. 2010.
NXP SEMICONDUCTORS. UM10204. I2C-bus specification and user manual, junho 2007.
Disponivel em: <http://www.nxp.com/documents/user_manual/UM10204.pdf>. Acesso em: 13 out.
2010.
PRADO, S. Barramento I2C, 2007. Disponivel em:
<http://www.embarcados.com.br/Artigos/Hardware-Embarcado/Barramento-I2C.html>. Acesso
em: 13 out. 2010.
PRESTES, R. F. et al. Estudo do Motor de Passo e seu controle digital, 2001. Disponivel em:
<http://recreio.gta.ufrj.br/grad/01_1/motor/>. Acesso em: 5 out. 2010.
ROBOT ELECTRONICS. Using the I2C Bus, 2010. Disponivel em: <http://www.robot-
electronics.co.uk/acatalog/I2C_Tutorial.html>. Acesso em: 14 out. 2010.
SICA, C. B. S. D. Programando displays de cristal líqüido a partir da porta paralela do PC,
2010. Disponivel em: <http://www.din.uem.br/sica/material/artigo-lcd.pdf>. Acesso em: 12 out.
2010.
SOARES, M. J. Faça placas de circuito impresso com acabamento semiprofissional. Saber
Eletrônica, 2008. Disponivel em: <http://www.sabereletronica.com.br/secoes/leitura/728>. Acesso
em: 17 Abr 2011.
SOUZA, J. D. Desbravando o PIC: ampliado e atualizado para PIC16F628A. 12ª. ed. São Paulo:
Érica, 2008.
UNIVERSIDADE FEDERAL DE LAVRAS. UFLA - Programa de Pós-Graduação em
Engenharia de Sistemas, 2010. Disponivel em:
<http://www.prpg.ufla.br/ppg/esistemas/_adm/upload/file/Ementas/sistemas embarcados pos
graduacao.pdf>. Acesso em: 20 ago. 2010.
UNIVERSIDADE PRESBITERIANA MACKENZIE. Portal Mackenzie: Microprocessadores I,
2010. Disponivel em: <http://www.mackenzie.br/5919.html>. Acesso em: 20 ago. 2010.
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ. UTFPR — Site, 2010. Disponivel
em: <http://pessoal.utfpr.edu.br/amauriassef/arquivos/2010_2 Pens AI32C - Sistemas
Microprocessados_Amauri_D.pdf>. Acesso em: 20 ago. 2010.
VERLE, M. PIC microcontrollers. 1ª. ed. [S.l.]: mikroElektronika, 2008. Disponivel em:
<http://www.mikroe.com/eng/products/view/11/book-pic-microcontrollers/>. Acesso em: 10 set.
2010.
115](https://image.slidesharecdn.com/tcciiversofinal-110901223859-phpapp02/85/Kit-Modular-de-Desenvolvimento-Baseado-em-Microcontrolador-PIC-130-320.jpg)



![APÊNDICE C
/*****************************************************************************
-------------------------------
| Validação do I²C com EEPROM |
-------------------------------
PIC18F4520 => Memoria Eeprom I²C
PORTC.RC3 => SCL
PORTC.RC4 => SDA
Obs.: Utilizar biblioteca I2C do MikroC PRO for PIC
*****************************************************************************/
#define I2C_EEPROM_ADDR_AND_WRITE 0xA2 // Endereço da EEPROM + W
#define I2C_EEPROM_ADDR_AND_READ 0xA3 // Endereço da EEPROM + R
#define FREQ_CLOCK_SCL 100000 // frequência de clock do I²C
void i2c_eeprom_write(unsigned char endereco, unsigned char valor) {
I2C1_Start(); // sinal de Start
I2C1_Wr(I2C_EEPROM_ADDR_AND_WRITE); // envia endereço da EEPROM + W
I2C1_Wr(endereco); // envia endereço interno EEPROM
I2C1_Wr(valor); // envia valor a ser gravado
I2C1_Stop(); // sinal de Stop
}
void i2c_eeprom_write_array(unsigned char endereco, unsigned char* valor,
unsigned char n) {
unsigned char i;
I2C1_Start(); // sinal de Start
I2C1_Wr(I2C_EEPROM_ADDR_AND_WRITE); // envia endereço da EEPROM + W
I2C1_Wr(endereco); // envia endereço interno da EEPROM
for (i = 0; i < n; i++) {
I2C1_Wr(valor[i]); // envia valor a n vezes
}
I2C1_Stop(); // sinal de Stop
}
unsigned char i2c_eeprom_read(unsigned char endereco) {
unsigned char valor = 0;
I2C1_Start(); // sinal de Start
I2C1_Wr(I2C_EEPROM_ADDR_AND_WRITE); // envia endereço da EEPROM + W
I2C1_Wr(endereco); // envia endereço interno da EEPROM
I2C1_Repeated_Start(); // repetir sinal de Start
I2C1_Wr(I2C_EEPROM_ADDR_AND_READ); // envia endereço da EEPROM + R
valor = I2C1_Rd(0); // recebe valor do endereço corrente
I2C1_Stop(); // sinal de Stop
return valor;
}
void main() {
unsigned char array_valor[] = {8, 7, 6, 5};
unsigned char i;
I2C1_Init(FREQ_CLOCK_SCL);
i2c_eeprom_write(0x00, 9); Delay_ms(10);
i2c_eeprom_write_array(0x01, array_valor, 4); Delay_ms(10);
i = i2c_eeprom_read(0x02);
}
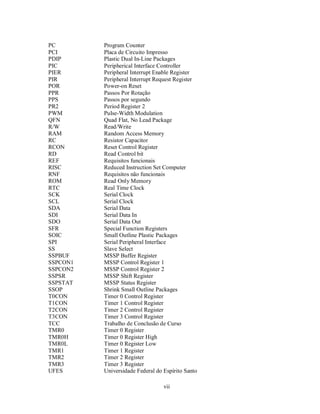
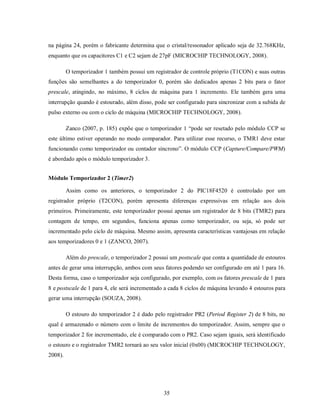
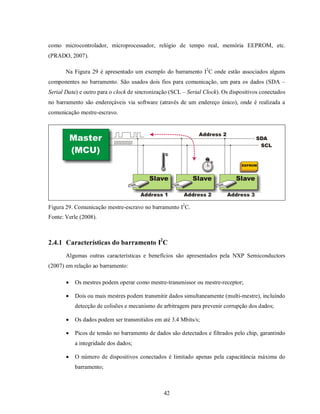
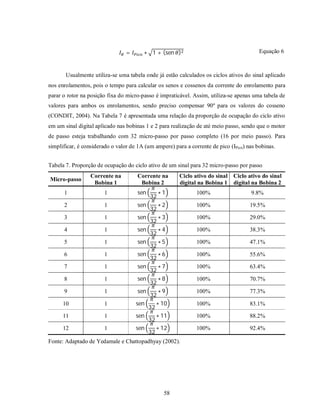
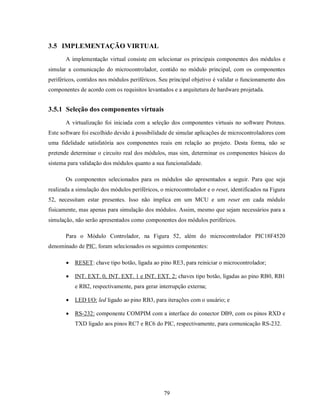
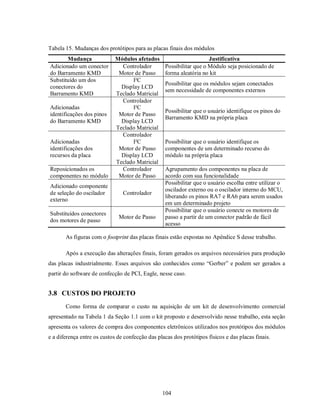
Figura 75. Código fonte do Experimento C.
120](https://image.slidesharecdn.com/tcciiversofinal-110901223859-phpapp02/85/Kit-Modular-de-Desenvolvimento-Baseado-em-Microcontrolador-PIC-135-320.jpg)

![unsigned char i2c_rtc_to_char_hora(unsigned char hora) {
hora = hora & 0b00011111;
return i2c_rtc_to_char(ADDR_HOURS, hora);
}
void i2c_rtc_set(unsigned char endereco, unsigned char valor) {
I2C1_Start(); // sinal de Start
I2C1_Wr(I2C_RTC_ADDR_AND_WRITE); // envia endereço do RTC + W
I2C1_Wr(endereco); // envia endereço interno do RTC
I2C1_Wr(valor); // envia valor a ser gravado
I2C1_Stop(); // sinal de Stop
}
void i2c_rtc_set_all(unsigned char* tempo) {
unsigned char i;
I2C1_Start(); // sinal de Start
I2C1_Wr(I2C_RTC_ADDR_AND_WRITE); // envia endereço do RTC + W
I2C1_Wr(0x00); // envia endereço interno do RTC
for (i = 0; i < 8; i++) {
I2C1_Wr(tempo[i]); // envia valores a serem gravados
}
I2C1_Stop(); // sinal de Stop
}
unsigned char i2c_rtc_get(unsigned char endereco) {
unsigned char valor;
I2C1_Start(); // sinal de Start
I2C1_Wr(I2C_RTC_ADDR_AND_WRITE); // envia endereço do RTC + W
I2C1_Wr(endereco); // envia endereço interno do RTC
I2C1_Repeated_Start(); // repetir sinal de Start
I2C1_Wr(I2C_RTC_ADDR_AND_READ); // envia endereço RTC + R
valor = I2C1_Rd(0); // leitura do valor no endereço corrente
I2C1_Stop(); // sinal de Stop
return valor;
}
void i2c_rtc_set_segundo(unsigned char valor) {
valor = i2c_char_to_rtc(ADDR_SECONDS, valor);
i2c_rtc_set(ADDR_SECONDS, valor);
}
void i2c_rtc_set_minuto(unsigned char valor) {
valor = i2c_char_to_rtc(ADDR_MINUTES, valor);
i2c_rtc_set(ADDR_MINUTES, valor);
}
void i2c_rtc_set_hora(unsigned char hora, unsigned char formato_hora) {
hora = i2c_char_to_rtc_hora(hora, formato_hora);
i2c_rtc_set(ADDR_HOURS, hora);
}
void i2c_rtc_set_semana(unsigned char valor) {
valor = i2c_char_to_rtc(ADDR_DAY, valor);
i2c_rtc_set(ADDR_DAY, valor);
}
Figura 76. Código fonte do Experimento D. (continuação).
122](https://image.slidesharecdn.com/tcciiversofinal-110901223859-phpapp02/85/Kit-Modular-de-Desenvolvimento-Baseado-em-Microcontrolador-PIC-137-320.jpg)
![void i2c_rtc_set_dia(unsigned char valor) {
valor = i2c_char_to_rtc(ADDR_DATE, valor);
i2c_rtc_set(ADDR_DATE, valor);
}
void i2c_rtc_set_mes(unsigned char valor) {
valor = i2c_char_to_rtc(ADDR_MONTH, valor);
i2c_rtc_set(ADDR_MONTH, valor);
}
void i2c_rtc_set_ano(unsigned char valor) {
valor = i2c_char_to_rtc(ADDR_YEAR, valor);
i2c_rtc_set(ADDR_YEAR, valor);
}
void main() {
unsigned char tempo[] = {1, 2, 3, 4, 5, 6, 7, 0b00000011};
I2C1_Init(FREQ_CLOCK_SCL);
i2c_rtc_set_all(tempo);
i2c_rtc_set_segundo(1);
i2c_rtc_set_minuto(2);
i2c_rtc_set_hora(3, 1);
i2c_rtc_set_semana(4);
i2c_rtc_set_dia(5);
i2c_rtc_set_mes(6);
i2c_rtc_set_ano(7);
}
Figura 76. Código fonte do Experimento D. (continuação).
123](https://image.slidesharecdn.com/tcciiversofinal-110901223859-phpapp02/85/Kit-Modular-de-Desenvolvimento-Baseado-em-Microcontrolador-PIC-138-320.jpg)
![APÊNDICE E
/*****************************************************************************
-----------------------------------------------
| Validação do acionamento digital do MOTOR 1 |
-----------------------------------------------
PIC18F4520 => MOTOR 1
PORTA.RA0 => Acionamento digital Bobina 1
PORTA.RA1 => Acionamento digital Bobina 2
PORTA.RA2 => Acionamento digital Bobina 3
PORTA.RA3 => Acionamento digital Bobina 4
*****************************************************************************/
#define M1_B1 PORTA.RA0
#define M1_B2 PORTA.RA1
#define M1_B3 PORTA.RA2
#define M1_B4 PORTA.RA3
unsigned char posicao; // indice de passo
unsigned char passo[] = { // passos em acionamento digital (b4, b3, b2, b1)
0b1001,
0b1000,
0b1100,
0b0100,
0b0110,
0b0010,
0b0011,
0b0001,
};
void motor1_init(){
ADCON1 = 0x0F; // Configura todas as portas analógicas para digitais
TRISA.RA0 = 0;
TRISA.RA1 = 0;
TRISA.RA2 = 0;
TRISA.RA3 = 0;
}
void motor1_set_passo() {
M1_B1 = (passo[posicao] & 0b00000001) == 0 ? 0 : 1;
M1_B2 = (passo[posicao] & 0b00000010) == 0 ? 0 : 1;
M1_B3 = (passo[posicao] & 0b00000100) == 0 ? 0 : 1;
M1_B4 = (passo[posicao] & 0b00001000) == 0 ? 0 : 1;
}
Figura 77. Código fonte do Experimento E.
124](https://image.slidesharecdn.com/tcciiversofinal-110901223859-phpapp02/85/Kit-Modular-de-Desenvolvimento-Baseado-em-Microcontrolador-PIC-139-320.jpg)

![APÊNDICE F
/*****************************************************************************
--------------------------------------------
| Validação do controle do MOTOR 2 com PWM |
--------------------------------------------
PIC18F4520 => MOTOR 2
PORTA.RA4 => CHAVE_B1_B3, Sinal de chaveamento do PWM1 entre as Bobinas 1 e 3
PORTA.RA5 => CHAVE_B2_B4, Sinal de chaveamento do PWM2 entre as Bobinas 2 e 4
PORTC.RC2 => Sinal PWM1 (CCP1)
PORTC.RC1 => Sinal PWM2 (CCP2)
Obs.: Utilizar biblioteca PWM do mikroC for PIC PRO
FREQ_PWM => frequência de inicialização do sinal PWM
PAUSA => delay aplicado entre as mudanças de sinal PWM (ms)
*****************************************************************************/
#define CHAVE_B1_B3 PORTA.RA4
#define CHAVE_B2_B4 PORTA.RA5
#define FREQ_PWM 5000
#define PAUSA 200
const unsigned char duty_cicle[] = {255, 236, 180, 98, 0}; //8
const unsigned char upasso = 8;
void motor2_set_chave(unsigned char b1_b3, unsigned char b2_b4) {
CHAVE_B1_B3 = b1_b3;
CHAVE_B2_B4 = b2_b4;
}
void motor2_start_pwm() {
PWM1_Start(); PWM2_Start();
}
void motor2_stop_pwm() {
PWM1_Stop(); PWM2_Stop();
}
void motor2_set_pwm(unsigned char pwm1_duty, unsigned char pwm2_duty) {
motor2_stop_pwm();
PWM1_Set_Duty(pwm1_duty); PWM2_Set_Duty(pwm2_duty);
motor2_start_pwm();
}
void motor2_init() {
ADCON1 = 0x0F; // Configura todas as portas analogicas para digitais
TRISA.RA4 = 0;
TRISA.RA5 = 0;
motor2_set_chave(0, 1);
PWM1_Init(FREQ_PWM); // Initialize PWM1 module at 5KHz
PWM2_Init(FREQ_PWM); // Initialize PWM2 module at 5KHz
motor2_start_pwm();
}
Figura 78. Código fonte do Experimento F.
126](https://image.slidesharecdn.com/tcciiversofinal-110901223859-phpapp02/85/Kit-Modular-de-Desenvolvimento-Baseado-em-Microcontrolador-PIC-141-320.jpg)
![void main() {
signed char enrolamento_a, enrolamento_b;
a = 0;
b = 0;
motor2_init();
motor2_set_pwm(duty_cicle[enrolamento_a], duty_cicle[enrolamento_b]);
Delay_ms(PAUSA);
while (1) {
// diminui Duty Cicle do PWM 1 na bobina 1
while (a < upasso/2) {
motor2_set_pwm(duty_cicle[++a], duty_cicle[b]);
Delay_ms(PAUSA);
}
motor2_set_chave(1, 1); // chaveia PWM 1 para bobina 3
// aumenta Duty Cicle do PWM 1 na bobina 3
do {
motor2_set_pwm(duty_cicle[--a], duty_cicle[b]);
Delay_ms(PAUSA);
} while (a > 0);
// diminui Duty Cicle do PWM 2 na bobina 4
while (b < upasso/2) {
motor2_set_pwm(duty_cicle[a], duty_cicle[++b]);
Delay_ms(PAUSA);
}
motor2_set_chave(1, 0); // chaveia PWM 2 para bobina 2
// aumenta Duty Cicle do PWM 2 na bobina 2
do {
motor2_set_pwm(duty_cicle[a], duty_cicle[--b]);
Delay_ms(PAUSA);
} while (b > 0);
// diminui Duty Cicle do PWM 1 na bobina 3
while (a < upasso/2) {
motor2_set_pwm(duty_cicle[++a], duty_cicle[b]);
Delay_ms(PAUSA);
}
motor2_set_chave(0, 0); // chaveia PWM 1 para bobina 1
// aumenta Duty Cicle do PWM 1 na bobina 1
do {
motor2_set_pwm(duty_cicle[--a], duty_cicle[b]);
Delay_ms(PAUSA);
} while (a > 0);
// diminui Duty Cicle do PWM 2 na bobina 2
while (b < upasso/2) {
motor2_set_pwm(duty_cicle[a], duty_cicle[++b]);
Delay_ms(PAUSA);
}
motor2_set_chave(0, 1); // chaveia PWM 2 para bobina 4
// aumenta Duty Cicle do PWM 2 na bobina 2
do {
motor2_set_pwm(duty_cicle[a], duty_cicle[--b]);
Delay_ms(PAUSA);
} while (b > 0);
}
}
Figura 78. Código fonte do Experimento F. (continuação).
127](https://image.slidesharecdn.com/tcciiversofinal-110901223859-phpapp02/85/Kit-Modular-de-Desenvolvimento-Baseado-em-Microcontrolador-PIC-142-320.jpg)

![void lcd_num(unsigned char num) {
unsigned char valor[3];
valor[0] = num/100;
valor[1] = (num/10) % 10;
valor[2] = num % 10;
if (valor[0] == 0) {
Lcd_Chr_Cp(' ');
} else {
Lcd_Chr_Cp(valor[0] + 0x30);
}
if (valor[1] == 0 && valor[0] == 0) {
Lcd_Chr_Cp(' ');
} else {
Lcd_Chr_Cp(valor[1] + 0x30);
}
Lcd_Chr_Cp(valor[2] + 0x30);
}
void lcd_cursor_pos(unsigned short int coluna, unsigned short int linha) {
unsigned short int i;
if (linha == 1) {
Lcd_Cmd(0x80);
} else {
Lcd_Cmd(0xC0);
}
for (i = 1; i < coluna; i++) {
Lcd_Cmd(0x14);
}
}
void main(){
unsigned short int i = 0;
lcd_start();
Lcd_Out(1, 1, "Contar ate 100");
Lcd_Out(2, 1, "i = ");
while (1) {
lcd_cursor_pos(5, 2);
lcd_num(i);
i = i < 100 ? i + 1 : 0;
Delay_ms(50);
}
}
Figura 79. Código fonte do Experimento G. (continuação).
129](https://image.slidesharecdn.com/tcciiversofinal-110901223859-phpapp02/85/Kit-Modular-de-Desenvolvimento-Baseado-em-Microcontrolador-PIC-144-320.jpg)









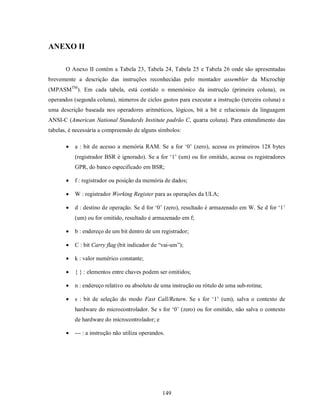

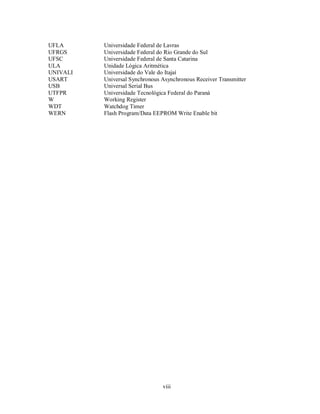
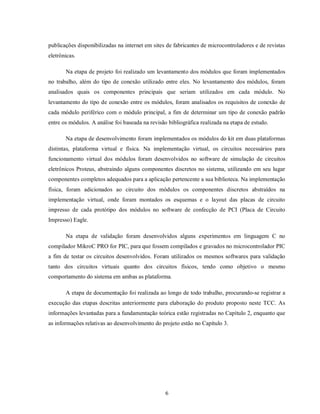
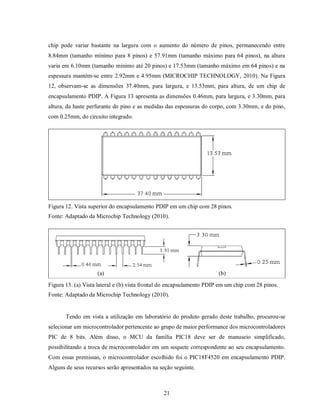
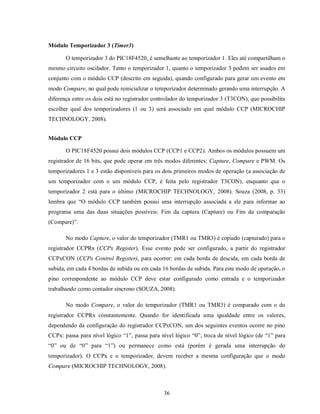
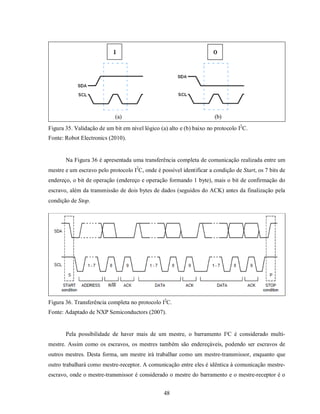
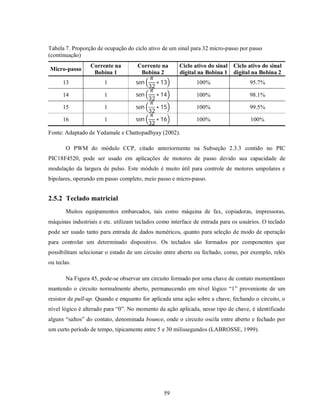
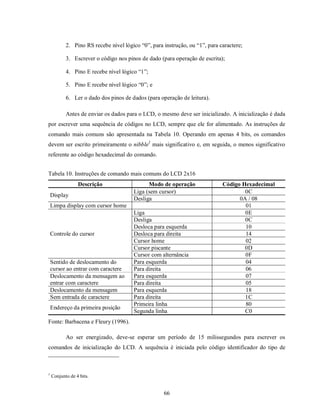
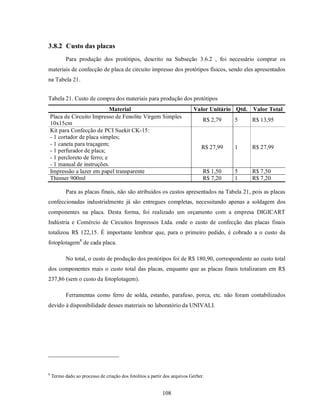
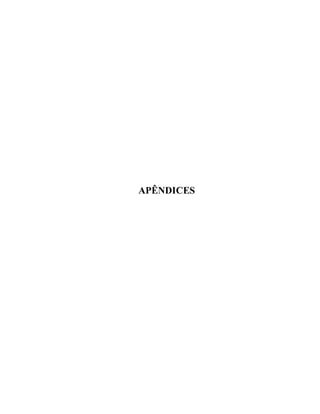
![Tabela 24. Instruções de operações orientadas a bit
Mnemônico Operandos Ciclos Descrição
BCF f, b{, a} 1 f[b] = 0
BSF f, b{, a} 1 f[b] = 1
BTFSC f, b{, a} 1 (2 ou 3) Não realiza a próxima instrução se f[b] == 0
BTFSS f, b{, a} 1 (2 ou 3) Não realiza a próxima instrução se f[b] == 1
BTG f, b{, a} 1 f[b] = ~f[b]
Fonte: Adaptado de Microchip Technology (2008).
Tabela 25. Instruções de operações literais
Mnemônico Operandos Ciclos Descrição
ADDLW k 1 W=W+k
ANDLW k 1 W=W&k
IORLW k 1 W=W|k
LFSR f, k 2 FSR (File Select Register) = k (apontado por f)
MOVLB k 1 BSR = k
MOVLW k 1 W=k
MULLW k 1 PRODH:PRODL = W * k
SUBLW k 1 W=k–W
XORLW k 1 W=W^k
Fonte: Adaptado de Microchip Technology (2008).
Tabela 26. Instruções de operações de controle
Mnemônico Operandos Ciclos Descrição
Salta para o endereço relativo n se o bit Carry de STATUS
BC n 1 (2)
for 1
Salta para o endereço relativo n se o bit Negative de STATUS
BN n 1 (2)
for 1
Salta para o endereço relativo n se o bit Carry de STATUS
BNC n 1 (2)
for 0
Salta para o endereço relativo n se o bit Negative de STATUS
BNN n 1 (2)
for 0
Salta para o endereço relativo n se o bit Overflow de
BNOV n 1 (2)
STATUS for 0
Salta para o endereço relativo n se o bit Zero de STATUS for
BNZ n 1 (2)
0
Salta para o endereço relativo n se o bit Overflow de
BOV n 1 (2)
STATUS for 1
BRA n 2 Salta para o endereço relativo rotina n (incondicional)
Fonte: Adaptado de Microchip Technology (2008).
151](https://image.slidesharecdn.com/tcciiversofinal-110901223859-phpapp02/85/Kit-Modular-de-Desenvolvimento-Baseado-em-Microcontrolador-PIC-166-320.jpg)











O documento descreve o desenvolvimento de um kit modular de hardware baseado em microcontrolador PIC para ensino e pesquisa de sistemas embarcados. O kit é composto por vários módulos comunicando-se através de barramento I2C, incluindo um controlador central PIC18F4520, módulos de motor de passo, teclado matricial e display LCD. O documento apresenta os requisitos, a arquitetura, a implementação virtual e física do kit, além dos custos envolvidos no projeto.










































