Baixado 13 vezes
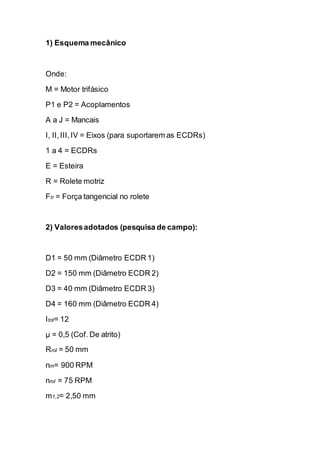
















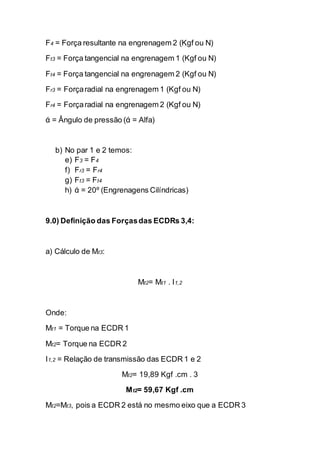










O documento apresenta os cálculos e dimensionamentos para o projeto de uma esteira transportadora mecatrônica, incluindo: (1) o dimensionamento do motor de acordo com a carga a ser transportada; (2) os cálculos geométricos e dimensionais para as quatro engrenagens cilíndricas utilizadas; (3) a definição das forças atuantes nas engrenagens.








































![Engrenagem teoria completa[1]](https://cdn.slidesharecdn.com/ss_thumbnails/engrenagemteoriacompleta1-180925140702-thumbnail.jpg?width=640&height=640&fit=bounds)

