Baixado 420 vezes






![Integrais Duplas
1.1
Introdução
Caros alunos iniciamos aqui nosso curso de Cálculo III com o
tema “Integrais Dupla”. A integração dupla, em essência, é uma
extensão natural da integral simples vista em Cálculo I e definida
como limite de somas de Riemann. Na prática, a integração dupla
é dada por duas integrações simples, cada uma efetuada sobre uma
variável e considerando as demais como constantes. É o que denominamos de integrais interadas. Suas características e detalhes
próprios serão vistas ao longo do nosso curso, nas próximas duas
aulas.
1.2
Integral Dupla: Domínios Retangulares
Começamos por considerar uma função f definida em um domínio retangular R = {(x, y) ∈ R2 |a ≤ x ≤ b∧c ≤ y ≤ d}. Formalmente f : [a, b]×[c, d] → R. Usando a imaginação, pensemos em R
coberta por uma rede de retas paralelas aos eixos coordenados e que
dividem R em pequenos retângulos (Fig. 1.1) . Oficialmente, consideraremos duas partições P [a, b] = {x0 = a, x1 , . . . , xj , xj+1 , . . . ,
xm = b} e P [c, d] = {y0 = c, y1 , . . . , yk , yk+1 , . . . , yn = d} onde
como visto em Cálculo I temos: x0 < x1 < · · · < xj < xj+1 <
· · · < xm e y0 < y1 < · · · < yk < yk+1 < · · · < yn .
Desta forma cada um dos Ij = [xj−1 , xj ] e Jk = [yk−1 , yk ] pequenos subintervalos têm comprimentos ∆xj = xj − xj−1 e ∆yk =
yk − yk−1 , respectivamente. Definimos, agora, a uma partição para
o retângulo R por P = P [R] = P [a, b] × P [c, d], o produto cartesiano das partições P [a, b] e P [c, d]. As retas retalham a região
R em uma série de retângulos Ajk = [xj−1 , xj ] × [yk−1 , yk ], 1 ≤
12](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-8-320.jpg)
![Cálculo III
AULA
1
Figura 1.1: Partição de R = [a, b] × [c, d]
j ≤ m, 1 ≤ k ≤ n. A area de cada pequeno retângulo é dada
por ∆Ajk = ∆xj ∆yk . Como tanto ∆xj quanto ∆yk são diferentes de zero, a área de cada pequeno retângulo é também diferente de zero. Podemos então definir a norma da partição por:
|P | = max (∆Ajk ), que corresponde a maior área entre todos os
1≤j≤m
1≤k≤n
pequeno retângulo.
Pausa para respirar que já vamos definir a integral dupla sobre
domínios retangulares. Para isto tomamos um ponto (ξj , ζk ) ∈
[xj−1 , xj ] × [yk−1 , yk ] em cada pequeno retângulo e definimos a seguinte soma de Riemann:
m
n
Smn =
f (ξj , ζk )∆Ajk
j=1 k=1
A integral dupla da função f (x, y) sobre o retângulo R, denotada
f (x, y)dxdy será então definida como o seguinte limite:
R
def
f (x, y)dxdy = lim Smn
R
BIOGRAFIA
Georg
Friedrich
Bernhard
Riemann
nasceu em Breselenz,
Reino de Hanôver,
17 de Setembro de
1826 e morreu em
Selasca, Itália, 20 de
Junho de 1866, foi um
matemático
alemão,
com
contribuições
fundamentais para a
análise e a geometria
diferencial. Wikipedia
|P |→0
13](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-9-320.jpg)
![Integrais Duplas
Figura 1.2: Soma de Riemann para f (x, y) em R = [a, b] × [c, d]
1.3
Integral Dupla: Domínios Não Retangulares Limitados
Para definir a integral dupla de uma função f : D ⊂ R2 → R
onde D é não é uma região retangular, porém é limitada, começamos por considerar uma função F definida em um domínio retangular R = {(x, y) ∈ R2 |a ≤ x ≤ b ∧ c ≤ y ≤ d} tal
f (x, y) , (x, y) ∈ D
que D ⊂ R e F (x, y) =
. Formalmente
0
, (x, y) ∈ D
/
F : [a, b] × [c, d] → R é uma extensão da função f (x, y). Usando
a imaginação, pensemos em R coberta por uma rede de retas paralelas aos eixos coordenados e que dividem R em pequenos retângulos e procedemos como na integral dupla sobre domínios retangulares, considerando a uma partição para o retângulo R por
14](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-10-320.jpg)
![Cálculo III
AULA
P = P [R] = P [a, b] × P [c, d], o produto cartesiano das partições
1
P [a, b] e P [c, d] onde P [a, b] = {x0 = a, x1 , . . . , xj , xj+1 , . . . , xm =
b} e P [c, d] = {y0 = c, y1 , . . . , yk , yk+1 , . . . , yn = d}. Do mesmo
modo definimos a norma da partição por: |P | = max (∆Ajk )
1≤j≤m
1≤k≤n
onde ∆Ajk = ∆xj ∆yk , ∆xj = xj − xj−1 e ∆yk = yk − yk−1 . Tomamos um ponto (ξj , ζk ) ∈ [xj−1 , xj ] × [yk−1 , yk ] em cada pequeno
retângulo e definimos a seguinte soma de Riemann para a função
estendida F (x, y):
m
n
Smn =
F (ξj , ζk )∆Ajk
j=1 k=1
A integral dupla da função f (x, y) sobre o domínio D ⊂ R2 , denof (x, y)dxdy será então definida como o seguinte limite:
tada
D
def
f (x, y)dxdy = lim Smn
D
|P |→0
Observem na partição (Fig. 1.3) que apenas os pequenos retângulos cinza claro contribuem para a soma de Riemann os demais
têm contribuição nula visto que o ponto escolhido dentro destes
estão fora de D ⊂ R2 e portanto F (ξj , ζk ) = 0.
1.4
Interpretação Geométrica
Quando a função f (x, y) é positiva na região R, como a da
(Fig. 1.2), vemos que a soma de Riemann aproxima o volume do
prisma sólido reto limitado inferiormente por R e superiormente
pela superfície z = f (x, y) e quanto maior for o refinamento da partição de R melhor será a aproximação. Podemos então, interpretar
f (x, y)dxdy como o volume do prisma sólido
a integral dupla
R
15](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-11-320.jpg)
![Integrais Duplas
Figura 1.3: Partição para F (x, y) em R = [a, b] × [c, d]
reto limitado inferiormente por R e superiormente pela superfície
z = f (x, y).
1.5
Integrais Iteradas
Do mesmo modo que para a integral simples, na integral dupla
a soma de Riemann não é um modo prático de se calcular uma
integral dupla. Vejamos agora um procedimento que facilitará o
cálculo de integrais duplas. Vamos exemplificar calculando o volume de um prisma reto de base retangular, limitado inferiormente
por [a, b] × [c, d] e superiormente pela função de valores positivos
f (x, y). para cada valor fixo de x no intervalo [a, b] consideremos
o perfil A(x) (área da seção transversal em x) (Fig. 1.4) fazemos
o produto por dx e integramos no intervalo [a, b]. Isto resulta no
16](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-12-320.jpg)
![Cálculo III
AULA
1
Figura 1.4: A(x), x fixo, integramos em relação a y
volume do citado prisma.
b
V =
A(x)dx
a
Por outro lado o perfil A(x) é dada pela área abaixo da curva
f (x, y), fixado o x, entre os valores de y no intervalo [c, d]. E como
d
f (x, y)dy.
vimos em Cálculo I A(x) =
c
O volume do prisma pode ser então escrito como:
b
d
V =
f (x, y)dy dx
a
c
.
Podemos alternativamente calcular o mesmo volume considerando
os perfis A(y) (área da seção transversal em y) (Fig. 1.5) fazemos
o produto por dy e integramos no intervalo [c, d]. Isto resulta no
volume do citado prisma.
17](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-13-320.jpg)


![Integrais Duplas
número finito de curvas em R2 , então vale:
f (x, y)dxdy =
D
f (x, y)dxdy +
A
f (x, y)dxdy
B
OBS 1.1. As duas primeiras propriedades diz respeito à “linearidade” do operador integral dupla. As terceira e quarta propriedades são denominadas “dominação” enquanto que a quinta
propriedade é denominada “aditividade”.
1.7
Alguns Exemplos
Nada mais natural que ilustrar um novo conceito com exemplos e, vamos aqui fazer exatamente isto, ilustrar o conceito de
integral dupla com dois exemplos. Antes porém, vale observar que
a na prática uma integral dupla equivale a duas integrais simples e
neste caso uma pergunta fica no ar e não deixaremos sem resposta.
Qual das duas variáveis x ou y integraremos primeiro? Muito bem,
a resposta é dada pela propria expressão da integral dupla. Isto
f (x, y)dxdy primeiramente integramos na va-
é, na integral
R
f (x, y)dydx
riável x e depois na variável y. Já na integral
R
primeiramente integramos na variável y e depois na variável x.
Vamos diretamente para o primeiro exemplo de integral dupla sobre domínios retangulares. A saber:
Exemplo 1.1. Considere a função f : [0, 1] × [0, 1] → R (Fig.
1.6) dada por f (x, y) = exp(−x − y) e determine a integral dupla
f (x, y)dxdy sobre a região R = {(x, y) ∈ R2 |0 ≤ x ≤
I =
R
1 ∧ 0 ≤ y ≤ 1}.
20](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-16-320.jpg)
![Cálculo III
AULA
1
Figura 1.6: Função f : [0, 1] × [0, 1] → R: f (x, y) = exp(−x − y)
SOLUÇÃO:
Passo 1 colocaremos os limites de integração que representam a
região R dada, segundo a ordem de integração:
1
1
exp(−x − y)dxdy
I=
0
0
Lembrando que: exp(−x − y) = exp(−x) exp(−y) temos:
1
1
exp(−x) exp(−y)dxdy
I=
0
0
Passo 2 integraremos na variável x considerando a variável y
como uma constante:
1
− exp(−x)
I=
0
1
0
exp(−y)dy
Substituindo os limites de integração temos:
1
(− exp(−1) − (− exp(−0))) exp(−y)dy
I=
0
Efetuando os cálculos temos:
1
(1 − exp(−1)) exp(−y)dy
I=
0
Passo 3 integraremos na variável y considerando a variável:
I = (1 − exp(−1)) − exp(−y)
1
0
Substituindo os limites de integração temos:
I = (1 − exp(−1)) (− exp(−1) − (− exp(−0)))
Efetuando os cálculos temos:
21](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-17-320.jpg)

![Cálculo III
AULA
mento de reta AB através da região D. O limite inferior para a
1
variável y será a função a(x), ponto da curva onde o segmento
entra na região D e o limite superior para a variável y será b(x),
ponto da curva onde o segmento de reta sai da região D.
Nossa integral será efetuada assim:
b
b(x)
f (x, y)dydx
f (x, y)dxdy =
D
a
a(x)
Exemplo 1.2. Considere a função f : [0, 1] × [0, 1] → R (Fig.
1.8) dada por f (x, y) = y(3x − x2 − y) e determine a integral duf (x, y)dxdy sobre a região D ∈ R2 interseção das
pla I =
R
curvas y = 0 e y = 3x − x2 .
Figura 1.8: Função f : [0, 1] × [0, 1] → R: f (x, y) = x.y
SOLUÇÃO:
Passo 1 faremos o desenho das duas curvas que determinam os
limites para a região D. A saber y = 0 e y = 3x − x2 (Fig. 1.9).
Passo 2 usando o processo prático exposto acima determinamos
os limites de integração. A saber: a = 0, b = 3, a(x) = 0 e
b(x) = 3x − x2 .
23](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-19-320.jpg)

![Cálculo III
I=
1.8
AULA
1
729
280
Conclusão
Na aula de hoje, vimos que a integral dupla é uma extensão
natural do conceito de integral simples visto em Cálculo I. E se
por um lado a integral simples pode ser interpretada como a área
sob a curva descrita pela função a ser integrada, a integral dupla
pode ser vista como o volume sob a superfície descrita pela função
a ser duplamente integrada.
RESUMO
No nosso resumo da Aula 01 constam os seguintes tópicos:
Integração Dupla: Domínios retangulares
Considerando uma função f : R → R onde R = {(x, y) ∈ R2 |a ≤
x ≤ b ∧ c ≤ y ≤ d} é um retângulo em R2 . Podemos cobri-lo com
uma malha de retas formada pela partição: P = P [R] = P [a, b] ×
P [c, d] onde cada P [a, b] = {x0 = a, x1 , . . . , xj , xj+1 , . . . , xn = b}
e P [c, d] = {y0 = c, y1 , . . . , yk , yk+1 , . . . , ym = d} são partições
dos intervalos [a, b] em x e [c, d] em y respectivamente. A malha divide R nos retângulos Ajk = [xj−1 , xj ] × [yk−1 , yk ], 1 ≤ j ≤
n, 1 ≤ k ≤ m de área ∆Ajk = ∆xj ∆yk onde ∆xj = xj − xj−1
e ∆yk = yk − yk−1 são os comprimentos dos subintervalos Ij =
[xj−1 , xj ] e Jk = [yk−1 , yk ] respectivamente. Defini-se a norma da
partição por: |P | = max (∆Ajk ). Toma-se um ponto (ξj , ζk ) ∈
1≤j≤n
1≤k≤m
25](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-21-320.jpg)
![Integrais Duplas
[xj−1 , xj ] × [yk−1 , yk ] em cada retângulo Ajk e definimos a seguinte
soma de Riemann:
n
m
Snm =
f (ξj , ζk )∆Ajk
j=1 k=1
A integral dupla da função f (x, ) sobre o retângulo R, denotada
f (x, y)dxdy será então definida como o seguinte limite:
R
def
f (x, y)dxdy = lim Snm
|P |→0
R
Integração Dupla: Domínios não Retangulares
Para definir a integral dupla de uma função f : D ⊂ R2 → R
onde D é não é uma região retangular, porém é limitada, começamos por considerar uma função F definida em um domínio retangular R = {(x, y) ∈ R2 |a ≤ x ≤ b ∧ c ≤ y ≤ d} tal
f (x, y) , (x, y) ∈ D
que D ⊂ R e F (x, y) =
. Formalmente
0
, (x, y) ∈ D
/
F : [a, b] × [c, d] → R é uma extensão da função f (x, y). A partir
daqui todo o procedimento é semelhante ao da definição da integral dupla em domínios retangulares. Podemos definir a integral
dupla de uma função f (x, y) em um domínio não retangular D por:
def
f (x, y)dxdy = lim Smn
D
onde: Smn =
m
j=1
|P |→0
n
k=1 F (ξj , ζk )∆Ajk .
é a soma de Riemann
para F (x, y)
Integrais Iteradas
As integrais iteradas dizem que em um domínio retangular R =
26](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-22-320.jpg)
![Cálculo III
AULA
[a, b] × [c, d] a ordem de execução das integrais simples não alteram
1
o valor da integral dupla, que pode ser representada por:
d
b
b
d
f (x, y)dy dx
f (x, y)dx dy =
c
a
a
c
.
Propriedades das Integrais Duplas
As integrais duplas são de certo modo semelhantes às propriedades
das integrais simples que vimos em Cálculo I sendo quase que uma
extensão natural destas. As integrais duplas têm, entre outras, as
seguintes propriedades:
Propriedade 1 Sejam f : D ⊂ R2 → R uma função de valores
reais integrável em D e c ∈ R, então vale:
cf (x, y)dxdy = c
D
f (x, y)dxdy
D
Propriedade 2 Sejam f, g : D ⊂ R2 → R duas funções de valores
reais integráveis em D, então vale:
(f + g)(x, y)dxdy =
D
f (x, y)dxdy +
D
g(x, y)dxdy
D
Propriedade 3 Sejam f : D ⊂ R2 → R uma função de valores
reais integrável em D tal que f (x, y) ≥ 0, ∀(x, y) ∈ D, então vale:
f (x, y)dxdy ≥ 0
D
27](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-23-320.jpg)

![Cálculo III
AULA
Passo 4 Deslocar o segmento de reta AB paralelo ao eixo y na
1
direção positiva do eixo x até tocar o ponto mais à direita de D
marcando o limite superior de x (ponto b na Fig. 1.7).
Passo 5 Tomando um ponto qualquer x ∈ (a, b) passamos o segmento de reta AB através da região D. O limite inferior para a
variável y será a função a(x), ponto da curva onde o segmento
entra na região D e o limite superior para a variável y será b(x),
ponto da curva onde o segmento de reta sai da região D.
Nossa integral será efetuada assim:
b
b(x)
f (x, y)dxdy =
D
f (x, y)dydx
a
a(x)
PRÓXIMA AULA
Em nossa próxima aula veremos mudança de variáveis na integração dupla. O objetivo da mudança de variáveis em uma integral dupla será a de facilitar esta integração de uma de duas
formas. A primeira será tornando o integrando mais simples. A
segunda transformando o domínio D do integrando em um domínio
de forma geométrica mais simples.
ATIVIDADES
Deixamos como atividades o cálculo de algumas integrais duplas.
ATIV. 1.1. Seja f : [−1, +1] × [−1, +1] → R dada por f (x, y) =
29](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-25-320.jpg)




![Mudança de Variáveis em Integrais Duplas
2.1
Introdução
Caros alunos a segunda aula do nosso curso de Cálculo III
tem com o tema “Mudança de Variáveis em Integrais Duplas”. As
f (x, y)dxdy, dada a natureza ou de
vezes, na integral dupla
HISTÓRIA
O teorema de mudança de variáveis
em integrais duplas
foi primeiro proposto
por Euler quando ele
desenvolveu a noção
de integral dupla em
1769.
Usado por
Legendre, Laplace e
Gauss, foi primeiramente
generalizado
para n variáveis por
Mikhail Ostrogradski
em 1836, resistiu a
uma
demonstração
mais rigorosa por longo
tempo (cerca de 125
anos). E foi satisfatóriamente demonstrado
por Elie Cartan em
uma série de artigos
nos anos 1890.
D
f (x, y) ao do seu domínio D, fica mais fácil integrar se fizermos
uma mudança nas variáveis de integração, como quando D é uma
disco, um semi-disco, um setor circular ou mesmo uma faixa de
disco, usando-se o sistema de coordenadas polares de modo geral
a integral dupla é mais fácil de se determinar que em coordenadas
cartesianas.
2.2
Mudança de Variáveis em Integrais Duplas
Caros alunos começaremos revendo mudança de variáveis em
integrais simples. Considere uma função f : [a, b] → R. A idéia
é mudar a variável inicial x para uma nova variável ξ relacionadas por x = g(ξ), onde g(ξ) é uma função biunívoca estritamente
crescente ou estritamente decrescente em [a, b]. Isto garante que
podemos inverter a mudança de variáveis.
Seja F (x) uma anti-derivada de f (x) tal que F (x) = f (x). Então,
da regra da cadeia temos:
d
F (g(ξ)) = F (g(ξ))g (ξ) = f (g(ξ))g (ξ).
dξ
Integrando com respeito a ξ temos:
d
F (g(ξ))dξ = f (g(ξ))g (ξ)dξ
dξ
Das propriedades da integral temos:
F (g(ξ)) + C =
f (g(ξ))g (ξ)dξ
Como x = g(ξ) temos:
F (x) + C =
34
f (g(ξ))g (ξ)dξ](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-30-320.jpg)





![Mudança de Variáveis em Integrais Duplas
Figura 2.5: Gráfico do exemplo 1
∂(x, y)
= r.
∂(r, ϑ)
Quanto a variável r varia no intervalo [0, 1] independentemente de
o módulo do jacobiano da transformação é dado por:
ϑ e a variável ϑ varia no intervalo [0, π/2] ( a variação de ângulo no
primeiro quadrante). Podemos reescrever a integral dupla como:
1
I=
π/2
f (x, y)dxdy =
D
f (r cos(ϑ), r sin(ϑ))rdϑdr Subs0
0
tituindo f (x, y) temos:
1
π/2
exp(−(r cos(ϑ))2 − (r sin(ϑ))2 )rdϑdr
I=
0
0
Efetuando as simplificações temos:
1
π/2
exp(−r2 )rdϑdr
I=
0
0
Passo 2 Integrando primeiramente na variável ϑ e como o integrando não depende de ϑ temos:
1
exp(−r2 )ϑ
I=
0
π/2
0
rdr
Substituindo os limites de integração temos:
1
exp(−r2 )rdr
I = π/2
0
Passo 3 A última integral (variável r) podemos efetuar por mudança de variáveis pondo ξ = r2
deste modo temos: dξ = 2rdr
1
1
1
ou seja rdr = − dξ e os limites r
eξ
. Daí, a integral
0
0
2
40](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-36-320.jpg)





![Algumas Aplicações da Integral Dupla
3.1
Introdução
Caros alunos nesta terceira aula do nosso curso de Cálculo III
com o tema “Algumas Aplicações das Integrais Duplas”. Dentre as
inúmeras aplicações da integral dupla, veremos apenas duas pelo
pouco tempo que dispomos. Veremos apenas como usar as integrais duplas para calcular a massa de uma região plana dada sua
distribuição de densidade e como calcular seu centro de gravidade.
Para outras aplicações recomendo uma busca na INTERNET
3.2
Preliminares
Consideraremos uma região D ⊂ R2 finita, com uma distribuição de densidade mássica superficial (massa por unidade de
superfície) (x, y), ∀(x, y) ∈ D.
Determinação da massa
Para determinar a massa consideremos uma função Φ definida
em um domínio retangular R = {(x, y) R2 |a ≤ x ≤ b ∧ c ≤
∈
(x, y) , (x, y) ∈ D
y ≤ d} tal que D ⊂ R e Φ(x, y) =
.
0
, (x, y) ∈ D
/
Considerando a uma partição para o retângulo R dada por P =
P [R] = P [a, b] × P [c, d], o produto cartesiano das partições P [a, b]
e P [c, d] onde P [a, b] = {x0 = a, x1 , . . . , xj , xj+1 , . . . , xm = b}
e P [c, d] = {y0 = c, y1 , . . . , yk , yk+1 , . . . , yn = d}. Tomamos um
ponto (ξj , ζk ) ∈ [xj−1 , xj ] × [yk−1 , yk ] em cada pequeno retângulo
e definimos a seguinte soma de Riemann:
m
n
Smn =
Φ(ξj , ζk )∆Ajk .
j=1 k=1
48](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-44-320.jpg)














![Integrais triplas
4.1
Introdução
Caros alunos a quarta aula do nosso curso de Cálculo III com o
tema “Integrais Triplas”. Bem como a integral dupla, vista na nossa
primeira aula, a integração tripla, em essência, é uma extensão
natural da integral simples vista em Cálculo I e definida como
limite de somas de Riemann. Na prática, a integração tripla é dada
HISTÓRIA
A primeira técnica
sistemática documentada para o cálculo
de integrais triplas no
cálculo de volume foi
o método da exaustão
de
Eudoxus
cerca
de 370AC. O maior
avanço
no
cálculo
de integrais triplas
veio do Iraque, no
século 11, na figura
de Ibn AL-Haythan
(conhecido na Europa
por Alhazen ).
Enquanto resolvia o que
ficou conhecido como
“Problema de Alhazen”
(um problema de ótica)
ele calculou o volume
de um parabolsóide
usando um método de
indução. Wikipédia.
por três integrações simples, cada uma efetuada sobre uma variável
e considerando as demais como constantes. É o que denominamos
de integrais interadas. As características e detalhes próprios das
integrais triplas serão vistas ao longo do nosso curso, nas próximas
três aulas.
4.2
Integração Tripla: Domínios Paralelepípedais
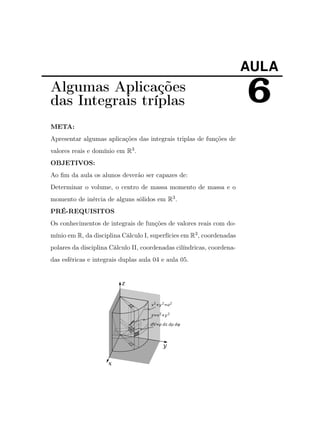
Começamos por considerar uma função φ definida em um domínio paralelepipedal R = {(x, y, z) ∈ R3 |a ≤ x ≤ b ∧ c ≤ y ≤
d ∧ e ≤ z ≤ f }. Formalmente φ : [a, b] × [c, d] × [e, f ] → R.
Usando a imaginação, pensemos em R retalhada por uma rede
de planos paralelos aos planos coordenados e que dividem R em
pequenos paralelepípedos. Oficialmente, consideraremos três partições P [a, b] = {x0 = a, x1 , . . . , xi , xi+1 , . . . , xl = b}, P [c, d] =
{y0 = c, y1 , . . . , yj , yj+1 , . . . , ym = d} e P [e, f ] = {z0 = e, z1 ,
. . . , zk , zk+1 , . . . , zn = f } onde como visto em Cálculo I temos:
x0 < x1 < · · · < xi < xi+1 < · · · < xl , y0 < y1 < · · · < yj <
yj+1 < · · · < ym e z0 < z1 < · · · < zk < zk+1 < · · · < zn . Desta
forma cada um dos pequenos subintervalos Ii = [xi−1 , xi ], Jj =
64](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-60-320.jpg)
![Cálculo III
AULA
[yj−1 , yj ] e Kk = [zk−1 , zk ] têm comprimentos ∆xi = xi − xi−1 ,
4
∆yj = yj − yj−1 e ∆zk = zk − zk−1 , respectivamente. Definimos,
agora, a uma partição para o paralelepípedo R por P = P [R] =
P [a, b]×P [c, d]×P [e, f ], o produto cartesiano das partições P [a, b],
P [c, d] e P [e, f ]. Os planos retalham a região R em uma série de pequenos paralelepípedos Vijk = [xi−1 , xi ] × [yj−1 , yj ] × [zk−1 , zk ], 1 ≤
i ≤ l, 1 ≤ j ≤ m, 1 ≤ k ≤ n. O volume de cada pequeno paralelepípedo é dado por ∆Vijk = ∆xi ∆yj ∆zk . Como tanto ∆xi quanto
∆yj quanto ∆zk são diferentes de zero, o volume de cada pequeno
paralelepípedo é também diferente de zero. Podemos então definir
a norma da partição por: |P | = max (∆Vijk ), que corresponde
1≤i≤l
1≤j≤m
1≤k≤n
ao maior volume entre todos os pequenos paralelepípedos.
Pausa para respirar que já vamos definir a integral tripla sobre domínios paralelepípedais. Para isto tomemos um ponto (ξi , ζj , ηk ) ∈
[xi−1 , xi ] × [yj−1 , yj ] × [zk−1 , zk ] em cada pequeno paralelepípedo
e definimos a seguinte soma de Riemann:
l
m
n
Slmn =
φ(ξi , ζj , ηk )∆Vijk
i=1 j=1 k=1
A integral tripla da função φ(x, y, z) sobre o paralelepípedo R,
φ(x, y, z)dxdydz será então definida como o se-
denotada
R
guinte limite:
def
φ(x, y, z)dxdydz = lim Slmn
R
|P |→0
65](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-61-320.jpg)
![Integrais triplas
4.3
Integração Tripla: Domínios Não Paralelepípedais Limitados
Para definir a integral tripla de uma função φ : D ⊂ R3 →
R onde D é limitado não paralelepipedal, começamos por considerar uma função Φ definida em um domínio paralelepipedal
R = {(x, y, z) ∈ R3 |a ≤ x ≤ b ∧ c ≤ y ≤ d ∧ e ≤ z ≤ f } tal
φ(x, y, z) , (x, y, z) ∈ D
. Formalque D ⊂ R e Φ(x, y, z) =
0
, (x, y, z) ∈ D
/
mente Φ : [a, b] × [c, d] × [e, f ] → R é uma extensão da função
φ(x, y, z). Usando a imaginação, pensemos em R coberta por uma
rede de planos paralelos aos planos coordenados e que dividem
R em pequenos paralelepípedos e procedemos como na integral
tripla sobre domínios paralelepípedais, considerando a uma partição para o paralelepípedo R por P = P [R] = P [a, b] × P [c, d] ×
P [e, f ], o produto cartesiano das partições P [a, b], P [c, d] e P [e, f ]
onde P [a, b] = {x0 = a, x1 , . . . , xi , xi+1 , . . . , xl = b}, P [c, d] =
{y0 = c, y1 , . . . , yj , yj+1 , . . . , ym = d} e P [e, f ] = {z0 = e, z1 ,
. . . , zk , zk+1 , . . . , zn = f }. Do mesmo modo definimos a norma
da partição por: |P | = max (∆Vijk ) onde ∆Vijk = ∆xi ∆yj ∆zk ,
1≤i≤l
1≤j≤m
1≤k≤n
∆xi = xi − xi−1 , ∆yj = yj − yj−1 e ∆zk = zk − zk−1 . Tomamos
um ponto (ξi , ζj , ηk ) ∈ [xi−1 , xi ] × [yj−1 , yj ] × [zk−1 , zk ] em cada
pequeno paralelepípedo e definimos a seguinte soma de Riemann
para a função estendida Φ(x, y, z):
l
m
n
Slmn =
Φ(ξi , ζj , ηk )∆Vijk
i=1 j=1 k=1
66](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-62-320.jpg)
![Cálculo III
AULA
A integral tripla da função φ(x, y, z) sobre o domínio D ⊂ R3 ,
4
φ(x, y, z)dxdydz será então definida como o se-
denotada
D
guinte limite:
def
φ(x, y, z)dxdydz = lim Slmn .
|P |→0
D
Observem que, semelhante ao caso das integrais duplas, apenas os
pequenos paralelepípedos cujo ponto escolhido pertence ao domínio
D ⊂ R3 , contribuem para a soma de Riemann os demais têm
contribuição nula visto que o ponto escolhido dentro destes estão
fora de D ⊂ R2 e portanto Φ(ξi , ζj , ηk ) = 0.
4.4
Interpretação Geométrica
Quando a função φ : D ⊂ R3 → R é constante e igual a um
(φ(x, y, z) = 1, ∀(x, y, z) ∈ D) e a região domínio D é limitada,
vemos que a soma de Riemann aproxima o volume da região D e
quanto maior for o refinamento da partição de R3 ⊃ R ⊃ D melhor
será a aproximação. Podemos então, interpretar a integral tripla
dxdydz como o volume da região D ⊂ R3 .
D
4.5
Integrais Iteradas
Dada uma função φ : R → R onde R = [a, b] × [c, d] × [e, f ], do
mesmo modo que na integral dupla, valem as integrais interadas:
b
d
f
φ(x, y, z)dxdydz =
1.
R
φ(x, y, z)dz dy dx
a
c
b
e
f
d
φ(x, y, z)dxdydz =
2.
R
φ(x, y, z)dy dz dx
a
e
c
67](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-63-320.jpg)

![Integrais triplas
que a na prática uma integral tripla equivale a três integrais simples e neste caso uma pergunta fica no ar. Qual das duas variáveis x, y ou z integraremos primeiro? Muito bem, a resposta é
dada pela propria expressão da integral tripla. Isto é, na integral
f (x, y, z)dxdydz primeiramente integramos na variável x,
R
depois na variável y e por último na variável z. Já na integral
f (x, y, z)dzdydx primeiramente integramos na variável z,
R
depois na variável y e por último na variável x.
Exemplo 4.1. Considere a função f : [0, 1] × [0, 1] × [0, 1] → R
dada por f (x, y) = x2 + y 2 + z 2 e determine a integral tripla
f (x, y, z)dxdydz sobre a região R = {(x, y, z) ∈ R3 |0 ≤
I=
R
x ≤ 1 ∧ 0 ≤ y ≤ 1 ∧ 0 ≤ z ≤ 1}.
SOLUÇÃO:
Passo 1 colocaremos os limites de integração que representam a
região R dada, segundo a ordem de integração:
1
1
1
(x2 + y 2 + z 2 )dxdydz
I=
0
0
0
Passo 2 integraremos na variável x considerando as variáveis y e
z como constantes:
1
1
x3
I=
+ y 2 x + z 2 x dydz
3
0
0
Substituindo os limites de integração temos:
1
1
13 03
I=
−
+ y 2 (1 − 0) + z 2 (1 − 0) dydz
3
3
0
0
Efetuando os cálculos temos:
1
1
1
I=
+ y 2 + z 2 dy
3
0
0
Passo 3 integraremos na variável y considerando a variável x
como constante:
70](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-66-320.jpg)



![Cálculo III
AULA
função positiva f (x) em um domínio [a, b] e a integral dupla pode
4
ser vista como o volume de um prisma reto limitado superiormente
pela a superfície descrita por uma função positiva f (x, y) e limitado
inferiormente pelo domínio [a, b] × [c, d], a integral tripla só tem
interpretação geométrica no caso simples em que f (x, y, z) = 1.
Neste caso a integral tripla representa o volume da região limitada
D ⊂ R3 .
RESUMO
Integração Tripla: Domínios Paralelepipedais
Considerando uma função φ definida em um domínio paralelepipedal R = {(x, y, z) ∈ R3 |a ≤ x ≤ b ∧ c ≤ y ≤ d ∧ e ≤ z ≤ f }.
Podemos dividir R em pequenos paralelepípedos considerando os
planos paralelos ao planos cartesianos gerados pela partição P =
P [R] = P [a, b]×P [c, d]×P [e, f ], o produto cartesiano das partições
P [a, b], P [c, d] e P [e, f ] onde P [a, b] = {x0 = a, x1 , . . . , xi , xi+1 , . . . ,
xl = b}, P [c, d] = {y0 = c, y1 , . . . , yj , yj+1 , . . . , ym = d} e P [e, f ] =
{z0 = e, z1 , . . . , zk , zk+1 , . . . , zn = f }. Os planos retalham a região
R em uma série de pequenos paralelepípedos Vijk = [xi−1 , xi ] ×
[yj−1 , yj ] × [zk−1 , zk ], 1 ≤ i ≤ l, 1 ≤ j ≤ m, 1 ≤ k ≤ n. O volume
de cada pequeno paralelepípedo é dado por ∆Vijk = ∆xi ∆yj ∆zk .
A norma da partição fica estabelecida como: |P | = max (∆Vijk ).
1≤i≤l
1≤j≤m
1≤k≤n
Toma-se um ponto (ξi , ζj , ηk ) ∈ [xi−1 , xi ] × [yj−1 , yj ] × [zk−1 , zk ]
em cada pequeno paralelepípedo e definimos a seguinte soma de
Riemann:
75](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-71-320.jpg)
![Integrais triplas
l
m
n
Slmn =
φ(ξi , ζj , ηk )∆Vijk
i=1 j=1 k=1
A integral tripla da função φ(x, y, z) sobre o paralelepípedo R,
φ(x, y, z)dxdydz será então definida como o se-
denotada
R
guinte limite:
def
φ(x, y, z)dxdydz = lim Slmn
|P |→0
R
Integração Tripla: Domínios Não Paralelepípedais Limitados
Para definir a integral tripla de uma função φ : D ⊂ R3 → R
onde D é não paralelepipedal limitado, começamos por considerar uma função Φ definida em um domínio paralelepipedal R =
{(x, y, z) ∈ R3 |a ≤ x b ∧ c ≤ y ≤ d ∧ e ≤ z ≤ f } tal que
≤
φ(x, y, z) , (x, y, z) ∈ D
D ⊂ R e Φ(x, y, z) =
. Formalmente
0
, (x, y, z) ∈ D
/
Φ : [a, b] × [c, d] × [e, f ] → R é uma extensão da função φ(x, y, z).
A partir daqui todo o procedimento é semelhante ao da definição
da integral tripla em domínios paralelepipedais. Podemos definir
a integral tripla de uma função φ(x, y, z) em um domínio não retangular D por:
def
φ(x, y, z)dxdydz = lim Slmn
D
onde Slmn =
l
i=1
m
j=1
|P |→0
n
k=1 Φ(ξi , ζj , ηk )∆Vijk
é a soma de Rie-
mann para Φ(x, y, z.
Integrais Iteradas
As integrais iteradas dizem que em um domínio retangular R =
[a, b] × [c, d] × [e, f ] a ordem de execução das integrais simples não
76](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-72-320.jpg)


![Integrais triplas
Nossa integral será efetuada assim:
b
b(x)
b(x,y)
f (x, y)dxdy =
D
f (x, y, z)dzdydx
a
a(x)
a(x,y)
PRÓXIMA AULA
Em nossa próxima aula veremos mudança de variáveis na integração tripla. O objetivo da mudança de variáveis em uma integral tripla será a de facilitar esta integração de uma de duas
formas. A primeira será tornando o integrando mais simples. A
segunda transformando o domínio D do integrando em um domínio
de forma geométrica mais simples.
ATIVIDADES
Deixamos como atividades o cálculo de algumas integrais tríplas.
ATIV. 4.1. Seja f : [−1, +1] × [−1, +1] × [−1, +1] → R dada por
f (x, y, z) = x2 + y 2 + z 2 . Determine a integral tripla:
f (x, y, z)dxdydz.
R
Comentário:
Volte ao texto e reveja com calma e atenção o
cálculo de integrais duplas dos exemplos acima, elas lhe servirão
de guia.
ATIV. 4.2. Seja f : D ⊂ R3 → R dada por f (x, y, z) = 1, onde
D = {(x, y, z) ∈ R3 |x ≥ 0 ∧ 0 ≤ y ≤ 1 − x2 ∧ 0 ≤ z ≤ 1 − x2 }.
80](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-76-320.jpg)






![Mudança de Variáveis em Integrais tríplas
À medida em que a reta r percorre a região D∗ o ângulo ϑ que ela
forma com o eixo x positivo varia do mínimo α que será o limite
inferior da variável ϑ ao máximo β que será o limite superior da
variável ϑ. Daí, a variável ϑ ∈ [α, β].
Passo 3 Para cada valor fixo da variável ϑ ∈ [α, β] atravessar a
região D∗ com a reta r (ver Fig. 5.7). O ponto onde a reta r
entra na região D∗ é o limite inferior α(ϑ) para a variável r e o
ponto onde a reta r sai da região D∗ é o limite inferior β(ϑ) para
a variável r. Daí, r ∈ [α(ϑ), β(ϑ)].
Passo 4 Para cada valor fixo da variável ϑ ∈ [α, β] e da variável
r ∈ [α(ϑ), β(ϑ)] tomar o ponto (r, ϑ) ∈ D∗ em coordenadas polares e levantar a reta s atravessando a região D (ver Fig. 5.8). O
ponto onde a reta s entra na região D é o limite inferior α(r, ϑ)
para a variável z e o ponto onde a reta s sai da região D é o limite
superior β(r, ϑ) para a variável z. Daí, z ∈ [α(r, ϑ), β(r, ϑ)].
Figura 5.7: Coordenadas ci-
Figura 5.8: Coordenadas ci-
líndricas 3
líndricas 4
Podemos agora encarar o nosso primeiro exemplo onde colocaremos
88](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-84-320.jpg)





![Mudança de Variáveis em Integrais tríplas
Passo 2 Identificar as curvas que limitam a região D∗ . Atravessar
a região D∗ com uma reta r começando na origem (ver Fig. 5.13).
Á medida em que a reta r percorre a região D∗ o ângulo ϑ que ela
forma com o eixo x positivo varia do mínimo α que será o limite
inferior da variável ϑ ao máximo β que será o limite superior da
variável ϑ. Daí, a variável ϑ ∈ [α, β].
Passo 3 Para cada valor fixo da variável ϑ ∈ [α, β] atravessar
Figura 5.14: Coordenadas es-
Figura 5.15: Coordenadas es-
féricas 3
féricas 4
a região D com o plano P que contem o eixo z e forma ângulo ϑ
com o eixo x positivo (ver Fig. 5.14). Traçamos uma reta r que
começa na origem e está contida no plano que corta D. À medida
em que a reta r percorre a região D o ângulo ϕ que ela forma com
o eixo z positivo varia do mínimo α(ϑ) que será o limite inferior da
variável ϕ ao máximo β(ϑ) que será o limite superior da variável
ϕ. Daí, a variável ϕ ∈ [α(ϑ), β(ϑ)].
Passo 4 Para cada valor fixo da variável ϑ ∈ [α, β] e da variável
r ∈ [α(ϑ), β(ϑ)] plano P que contem o eixo z e forma ângulo ϑ com
o eixo x positivo. No plano P traçar a reta s que forma ângulo ϕ
94](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-90-320.jpg)
![Cálculo III
AULA
com o eixo z positivo atravessando a região D (ver Fig. 5.15). O
5
ponto onde a reta s entra na região D é o limite inferior α(ϑ, ϕ)
para a variável r e o ponto onde a reta s sai da região D é o limite
superior β(ϑ, ϕ) para a variável r. Daí, r ∈ [α(ϑ, ϕ), β(ϑ, ϕ)].
Podemos agora encarar o nosso segundo exemplo onde colocaremos
em prática a determinação dos limites de integração em coordenadas esféricas.
Exemplo 5.2. Considere o sólido gerado pela interseção das superfícies: z =
x2 + y 2 (cone), z =
a2 − x2 − y 2 (esfera)(Fig
5.16) e determine seu volume.
Figura 5.16:
exemplo 2
Superfícies de
Figura 5.17: Interseção das
superfícies de exemplo 2
SOLUÇÃO: Para uma melhor compreensão mostramos na (Fig
5.17) o sólido gerado pela interseção das superfícies dadas e na
(Fig 5.18) as superfícies que compõem o sólido separadas no espaço.
95](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-91-320.jpg)





![Cálculo III
AULA
5
Determinação dos Limites para Integração em Coordenadas Cilíndricas
Para determinação dos limites de integração tripla em coordenadas
cilíndricas utiliza-se os seguintes passos:
Passo 1 Esboçar o domínio D bem como sua projeção D∗ no
plano xy (ver Fig. 5.5).
Passo 2 Identificar as curvas que limitam a região D∗ . Atravessar a região D∗ com uma reta r começando na origem (ver Fig.
5.6). Á medida em que a reta r percorre a região D∗ o ângulo ϑ
que ela forma com o eixo x positivo varia do mínimo α que será o
limite inferior da variável ϑ ao máximo β que será o limite superior
da variável ϑ. Daí, a variável ϑ ∈ [α, β].
Passo 3 Para cada valor fixo da variável ϑ ∈ [α, β] atravessar
a região D∗ com a reta r (ver Fig. 5.7). O ponto onde a reta r
entra na região D∗ é o limite inferior α(ϑ) para a variável r e o
ponto onde a reta r sai da região D∗ é o limite inferior β(ϑ) para
a variável r. Daí, r ∈ [α(ϑ), β(ϑ)].
Passo 4 Para cada valor fixo da variável ϑ ∈ [α, β] e da variável r ∈ [α(ϑ), β(ϑ)] tomar o ponto (r, ϑ) ∈ D∗ em coordenadas
polares e levantar a reta s atravessando a região D (ver Fig. 5.8).
O ponto onde a reta s entra na região D é o limite inferior α(r, ϑ)
para a variável z e o ponto onde a reta s sai da região D é o limite
superior β(r, ϑ) para a variável z. Daí, z ∈ [α(r, ϑ), β(r, ϑ)].
101](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-97-320.jpg)
![Mudança de Variáveis em Integrais tríplas
Determinação dos Limites para Integração em Coordenadas Esféricas
Para determinação dos limites de integração tripla em coordenadas
esféricas utiliza-se os seguintes passos:
Passo 1 Esboçar o domínio D bem como sua projeção D∗ no
plano xy (ver Fig. 5.12).
Passo 2 Identificar as curvas que limitam a região D∗ . Atravessar a região D∗ com uma reta r começando na origem (ver Fig.
5.13). Á medida em que a reta r percorre a região D∗ o ângulo ϑ
que ela forma com o eixo x positivo varia do mínimo α que será o
limite inferior da variável ϑ ao máximo β que será o limite superior
da variável ϑ. Daí, a variável ϑ ∈ [α, β].
Passo 3 Para cada valor fixo da variável ϑ ∈ [α, β] atravessar
a região D com o plano P que contem o eixo z e forma ângulo ϑ
com o eixo x positivo (ver Fig. 5.14). Traçamos uma reta r que
começa na origem e está contida no plano que corta D. À medida
em que a reta r percorre a região D o ângulo ϕ que ela forma com
o eixo z positivo varia do mínimo α(ϑ) que será o limite inferior da
variável ϕ ao máximo β(ϑ) que será o limite superior da variável
ϕ. Daí, a variável ϕ ∈ [α(ϑ), β(ϑ)].
Passo 4 Para cada valor fixo da variável ϑ ∈ [α, β] e da va-
102](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-98-320.jpg)
![Cálculo III
AULA
riável r ∈ [α(ϑ), β(ϑ)] plano P que contem o eixo z e forma ângulo
5
ϑ com o eixo x positivo. No plano P traçar a reta s que forma
ângulo ϕ com o eixo z positivo atravessando a região D (ver Fig.
5.15). O ponto onde a reta s entra na região D é o limite inferior
α(ϑ, ϕ) para a variável r e o ponto onde a reta s sai da região D é o
limite superior β(ϑ, ϕ) para a variável r. Daí, r ∈ [α(ϑ, ϕ), β(ϑ, ϕ)].
PRÓXIMA AULA
Em nossa próxima aula veremos algumas das inúmeras aplicações da integral tripla. Nossa atenção estará voltada para o cálculo
do centro de massa e momentos de inércia de sólidos gerados por
intersecções de superfícies em R3 .
ATIVIDADES
Deixamos como atividades dois problemas envolvendo mudança
de variáveis em integrais triplas.
ATIV. 5.1. Determine o volume do sólido formado pela intersecção das superfícies z = 0, z = 1 + x2 + 3y 2 e x2 + y 2 = 1.
Comentário:
Volte ao texto e reveja com calma e atenção o
primeiro exemplo e use o sistema de coordenadas cilíndricas.
ATIV. 5.2. Seja D ⊂ R3 a região formada pela intersecção das
superfícies z = 0 e x2 + yh2 + z 2 = 1 e f : R3 → R dada por
103](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-99-320.jpg)

![Algumas Aplicações das Integrais tríplas
6.1
Introdução
Caros alunos, nossa sexta aula tem como objetivo introduzir
algumas aplicações da integral tripla. Em particular veremos como
calcular a massa de uma região D ⊂ R3 dada sua distribuição
de densidade, bem como calcular, para a mesma, seu centro de
gravidade e momentos de massa. É um bocado de cálculo, mais
chegaremos lá.
6.2
Preliminares
Consideraremos uma região D ⊂ R3 finita, com uma distribuição de densidade (massa por unidade de volume)
: D → R+ i.e.
(x, y, z) > 0, ∀(x, y, z) ∈ D.
Determinação da massa
Para determinar a massa consideremos uma função Φ definida
em um domínio paralelepipedal R = {(x, y, z) ∈ R3 |a ≤ x ≤
b ∧ c ≤ y ≤ d ∧ e ≤ z ≤ f } tal que D ⊂ R e Φ(x, y, z) =
(x, y, z) , (x, y, z) ∈ D
. Considerando a uma partição para
0
, (x, y, z) ∈ D
/
o retângulo R dada por P = P [R] = P [a, b] × P [c, d] × P [e, f ],
o produto cartesiano de partições P [a, b], P [c, d] e P [e, f ] onde
P [a, b] = {x0 = a, x1 , . . . , xi , xi+1 , . . . , xl = b},x0 < x1 < · · · <
xi < xi+1 < · · · < xl , P [c, d] = {y0 = c, y1 , . . . , yj , yj+1 , . . . , ym =
d}, y0 < y1 < · · · < yj < yj+1 < · · · < ym e P [e, f ] = {z0 =
e, z1 , . . . , zk , zk+1 , . . . , zn = f }, z0 < z1 < · · · < zk < zk+1 <
· · · < zn . Tomamos um ponto (ξi , ζj , ηk ) ∈ [xi−1 , xi ] × [yj−1 , yj ] ×
[zk−1 , zk ] em cada pequeno paralelepípedo e definimos a seguinte
106](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-102-320.jpg)











![AULA
Cálculo III
O Momento de Massa em Relação ao Plano xy
Mxy (D) =
6
z (x, y, z)dxdydz.
D
O Momento de inércia de D em Relação ao eixo x
(y 2 + z 2 ) (x, y, z)dxdydz.
Ix (D) =
D
O Momento de inércia de D em Relação ao eixo y
(x2 + z 2 ) (x, y, z)dxdydz.
Iy (D) =
D
O Momento de inércia de D em Relação ao eixo z
(x2 + y 2 ) (x, y, z)dxdydz.
Iz (D) =
D
O Centro de Massa (¯, y , z ) de D
x ¯ ¯
x=
¯
Myz (D)
=
m(d)
x (x, y, z)dxdydz
D
,
(x, y, z)dxdydz
D
Mxz (D)
y=
¯
=
m(d)
y (x, y, z)dxdydz
D
e
(x, y, z)dxdydz
D
z=
¯
Mxy (D)
=
m(d)
z (x, y, z)dxdydz
D
.
(x, y, z)dxdydz
D
PRÓXIMA AULA
Em nossa próxima aula passaremos a estudar funções vetoriais
f : C ⊂ R3 → R3 onde C é uma curva no espaço R3 , dada parametricamente por: x = x(t), y = y (t) e z = z (t), t ∈ [a, b]. Não
ˆ
ˆ
ˆ
estaremos, como no Cálculo II, interessados na geometria intrín-
119](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-115-320.jpg)


![Integrais de Funções Vetoriais sobre Curvas em R3
7.1
Introdução
Caros alunos nossa aula de hoje “Integrais de Funções Vetoriais sobre Curvas” tem um forte sabor de física pois, veremos coisas
como: calculo do trabalho de uma força (função vetorial) ao longo
de uma trajetória (curva) ou fluxo de um campo de vetores através de uma curva (o termo fluxo é tipicamente da física). Isto,
não quer dizer que vocês tenham que se empenhar nos aspectos
físicos, devendo apenas ater-se aos aspectos matemáticos que são
os objetivos de nossa aula.
7.2
Curvas em R3
Nesta seção faremos uma pequena recapitulação sobre curvas
em R3 , que vocês já viram em Cálculo II. Será um breve resumo
onde estaremos recapitulando as definições e principais resultados.
Consideremos uma curva C ⊂ R3 dada parametricamente por:
x = x(t), y = y (t) e z = z (t), t ∈ [a, b] ou em sua forma vetorial
ˆ
ˆ
ˆ
r = x(t)i + y (t)j + z (t)k
r(t) ˆ
ˆ
ˆ k.
O vetor tangente unitário à C é dado por:
T (t) =
r
dr
r(t)
dt
−1
r
dr
r(t)
dt
A velocidade e a aceleração de uma partícula seguindo a curva C,
com movimento dado por r
r(t), no instante t são dadas por:
124](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-120-320.jpg)
![AULA
Cálculo III
7
r
dr
r(t)
dˆ(t)
x
dˆ(t)
y
z (t)
ˆ
=
i+
j+
k
dt
dt
dt
dt
d2 x(t)
ˆ
d2 y (t)
ˆ
d2 z (t)
ˆ
d2r
r(t)
=
i+
j+
k
2
2
2
dt
dt
dt
dt2
v
v(t) =
a
a(t) =
O comprimento de arco da curva C ⊂ R3 parametrizada por x =
x(t), y = y (t) e z = z (t), no intervalo [a, t] é dado por:
ˆ
ˆ
ˆ
t
s(t) =
ˆ
a
dˆ(t)
x
dt
2
dˆ(t)
y
dt
+
2
+
dˆ(t)
z
dt
2
dt
ˆ
Podemos inverter s = s(t) como t = t(s) e descrever a curva
ˆ
C ⊂ R3 parametrizada por comprimento de arco x = x(t(s)),
ˆ ˆ
y = y (t(s)) e z = z (t(s)).
ˆˆ
ˆˆ
A curvatura de C é definida por:
k(s) =
dT (s)
ds
e pode ser calculada usando-se a fórmula:
k(t) =
1
dT (t)
v
|v
v(t)| dt
O vetor normal unitário é definido por:
dT (t)
N (t) =
dt
−1
dT (t)
dt
O vetor binormal à curva C ⊂ R3 é definido por:
B
B(t) = T (t) × N (t)
Finalmente a torção da curva C ⊂ R3 é definida por:
125](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-121-320.jpg)
![Cálculo III
AULA
Definição 7.5. O centro de Massa de C ⊂ R3 é dado por (¯, y , z ),
x ¯ ¯
7
onde:
x =
¯
Myz (C)
=
m(C)
(x, y, z)xds
C
(x, y, z)ds
C
y =
¯
Mxz (C)
=
m(C)
(x, y, z)yds
C
(x, y, z)ds
C
z =
¯
Mxy (C)
=
m(C)
(x, y, z)zds
C
(x, y, z)ds
C
Definição 7.6. O momento de inércia de C ⊂ R3 relativo ao eixo
x, denotada Ix (C), é definido por:
(x, y, z)(y 2 + z 2 )ds
Ix (C) =
C
Definição 7.7. O momento de inércia de C ⊂ R3 relativo ao eixo
y, denotada Iy (C), é definido por:
(x, y, z)(x2 + z 2 )ds
Iy (C) =
C
Definição 7.8. O momento de inércia de C ⊂ R3 relativo ao eixo
z, denotada Iz (C), é definido por:
(x, y, z)(x2 + y 2 )ds
Iz (C) =
C
OBS 7.1. Se a curva C ⊂ R3 é dada parametricamente por: x =
x(t), y = y (t) e z = z (t), t ∈ [a, b], a massa, momento de massa
ˆ
ˆ
ˆ
relativo aos planos yz, xz e xy, momento de inércia relativo aos
eixos x, y e z respectivamente pode ser calculados por:
127](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-123-320.jpg)
![Integrais de Funções Vetoriais sobre Curvas em R3
b
v
(ˆ(t), y (t), z (t))|v
x
ˆ
ˆ
v(t)|dt
m(C) =
a
b
(ˆ(t), y (t), z (t))ˆ(t)|v
x
ˆ
ˆ x v
v(t)|dt
Myz (C) =
a
b
(ˆ(t), y (t), z (t))ˆ(t)|v
x
ˆ
ˆ y v
v(t)|dt
Mxz (C) =
a
b
(ˆ(t), y (t), z (t))ˆ(t)|v
x
ˆ
ˆ z v
v(t)|dt
Mxy (C) =
a
b
v
(ˆ(t), y (t), z (t))(ˆ2 (t) + z 2 (t))|v
x
ˆ
ˆ
y
ˆ
v(t)|dt
Ix (C) =
a
b
v
(ˆ(t), y (t), z (t))(ˆ2 (t) + z 2 (t))|v
x
ˆ
ˆ
x
ˆ
v(t)|dt
Iy (C) =
a
b
v
(ˆ(t), y (t), z (t))(ˆ2 (t) + y 2 (t))|v
x
ˆ
ˆ
x
ˆ
v(t)|dt
Iz (C) =
a
7.4
Campos Vetoriais: Trabalho, Circulação e
Fluxo
Consideremos um campo de vetores F : D ⊂ R3 → R3 e uma
curva C ⊂ D contínua e suave.
Definição 7.9. Definimos o fluxo integral de escoamento do campo
vetorial F ao longo da curva C ⊂ R3 por:
F • T ds
Φ(F, C) =
C
OBS 7.2. Quando a curva é simples e fechada, o fluxo integral de
escoamento é denominado de circulação e escrevemos:
F • T ds
Φ(F, C) =
C
OBS 7.3. Se a curva C ⊂ D ⊂ R3 é parametrizada por: x = x(t),
ˆ
y = y (t) e z = z (t), t ∈ [a, b]. Podemos interpretar o campo
ˆ
ˆ
128](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-124-320.jpg)
![Cálculo III
AULA
vetorial F : D ⊂ R3 → R3 como um campo de força no espaço,
7
a curva C ⊂ D ⊂ R3 como uma trajetória, a parametrização da
curva C ⊂ D ⊂ R3 dada por x = x(t), y = y (t) e z = z (t), t ∈ [a, b]
ˆ
ˆ
ˆ
como o movimento de uma partícula seguindo a trajetória C e o
fluxo integral de escoamento como o trabalho executado pela força
F ao longo de C e dado por:
b
F (ˆ(t), y (t), z (t)) • T (t)dt
x
ˆ
ˆ
T (F, C) =
a
OBS 7.4. Se a curva C ⊂ R3 é representada vetorialmente por:
r = x(t)i y (t)j z (t)k t ∈ [a, b], e o campo vetorial F : D ⊂ R3 →
ˆ i+ˆ j+ˆ k,
R3 representado por: F = f1 (x, y, z)i + f2 (x, y, z)j + f3 (x, y, z)k
k,
onde f1 , f2 , f3 : D ⊂ R3 → R são funções de valores reais, o fluxo
integral de escoamento pode ser escrito como uma das três formas:
r
F • dr
T (F, C) =
C
T (F, C) =
(f1 dx + f2 dy + f3 dz)
C
b
T (F, C) =
f1
a
dˆ(t)
y
dˆ(t)
z
dˆ(t)
x
+ f2
+ f3
dt
dt
dt
dt
Consideraremos, agora o caso particular de uma curva plana C ⊂
D ⊂ R2 simples e fechada e de um campo vetorial F : D ⊂ R2 →
R2 . Interpretaremos o campo vetorial F como o campo de velocidade de um fluido que atravessa a região D ⊂ R2 .
Definição 7.10. Definimos o fluxo de F através de C por:
def
F • N ds
φ(F, C) =
C
onde: N é a normal unitária exterior a C.
129](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-125-320.jpg)
![Integrais de Funções Vetoriais sobre Curvas em R3
7.5
Independência do Caminho
Consideremos um campo vetorial F : D ⊂ R3 → R3 , dois
pontos A, B ∈ D e um caminho C ⊂ D ligando o ponto A ao ponto
B. O trabalho realizado para mover uma partícula do ponto A ao
B
F • dr de modo
ponto B ao longo da trajetória C, dado por
A
geral depende do caminho C que liga os dois pontos. Porém, para
alguns campos vetoriais este trabalho depende apenas dos pontos
A e B.
Definição 7.11. Sejam F : D ⊂ R3 → R3 um campo vetorial e
B
dois pontos A, B ∈ D. Se
F • dr é a mesma ∀C ⊂ D paraA
metrizada por: x = x(t), y = y (t) e z = z (t), t ∈ [a, b] tal que
ˆ
ˆ
ˆ
A = C(a) e B = C(b) dizemos que F é um campo conservativo
em D.
Vamos em seguida definir um operador diferencial vetorial muito
importante denominado gradiente, A saber:
Definição 7.12. Sejam f : D ⊂ R3 → R uma função derivável de
valores reais. Definimos o gradiente de f , denotado
campo vetorial
f , como o
f : D ⊂ R3 → R3 dado por:
def
f =
∂f
∂f
∂f
i+
j+
k
∂x
∂y
∂z
Quando um campo vetorial pode ser dado pelo gradiente de um
campo escalar, dizemos que o campo escalar é uma função potencial para o campo vetorial. A saber:
Definição 7.13. Sejam F : D ⊂ R3 → R3 um campo vetorial e
f : D ⊂ R3 → R uma função derivável de valores reais tais que
130](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-126-320.jpg)
![Cálculo III
F =
f então f é dita uma função potencial para o campo vetorial
AULA
7
F em D
Daqui por diante consideraremos C uma curva lisa i.e. constituída
por um número finito de curvas simples unidas pelas extremidades
e D um conjunto aberto e conexo i.e. dado qualquer ponto de D
existe uma bola de centro no ponto inteiramente contida em D e
dado dois pontos quaisquer de D o segmento de reta que os une está
inteiramente contido em D. Consideraremos o campo vetorial F :
D ⊂ R3 → R3 dado por F = f1 (x, y, z)i + f2 (x, y, z)j + f3 (x, y, z)k
onde f1 , f2 , f3 : D ⊂ R3 → R são funções de valores reais contínuas
e com derivadas de primeira ordem contínuas.
Teorema 7.1. Sejam F : D ⊂ R3 → R3 dado por F = f1 (x, y, z)i
i+
f2 (x, y, z)j + f3 (x, y, z)k onde f1 , f2 , f3 : D ⊂ R3 → R são funções
de valores reais contínuas e com derivadas de primeira ordem contínuas em uma região D ⊂ R3 aberta e conexa do espaço. Então
existe uma função f : D ⊂ R3 → R contínua e diferenciável em
∂f
∂f
∂f
D ⊂ R3 tal que F = f =
i+
j+
k se somente se F for
∂x
∂y
∂z
um campo conservativo.
PROVA: Provaremos aqui a suficiência do teorema i.e. Se existe
uma função f : D ⊂ R3 → R contínua e diferenciável em D ⊂ R3
∂f
∂f
∂f
i+
j+
k então F é um campo consertal que F = f =
∂x
∂y
∂z
vativo.
Suponha dois pontos A, B ∈ D e uma curva C ⊂ D parametrizada
por r
r(t) = x(t)i + y (t)j + z (t)k t ∈ [a, b] tal que A = C(a) e
ˆ
ˆ
ˆ k,
B = C(b). Ao longo da curva C f é uma função f (ˆ(t), y (t), z (t))
x
ˆ
ˆ
derivável com relação a t e levando em conta a regra da cadeia
temos:
131](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-127-320.jpg)


![Integrais de Funções Vetoriais sobre Curvas em R3
Exemplo 7.1. Calcular o trabalho realizado pelo campo de força
F : R3 → R3 dado por F (t) = zi + 0j + xyk ao longo da hélice
Figura 7.1: Gráfico do exemplo 1
C ⊂ R3 dada por r = a cos(t)i + a sin(t)j + btk t ∈ [0, 4π] (ver
k,
Fig. 7.1 ).
SOLUÇÃO: Derivando o vetor posição r
r(t) com relação a t temos:
r
dr
r(t)
= −a sin(t)i + a cos(t)j + bk
dt
O campo de força F ao longo da curva C ⊂ R3 é dado por:
F (t) = bti + 0j + a2 sin(t) cos(t)k
Fazendo o produto escalar de F (t) por
F (t) •
r
dr
r(t)
temos:
dt
r
dr
r(t)
= −bat sin(t) + ba2 sin(t) cos(t)
dt
Calculando o trabalho realizado pela força F (t) ao longo da curva
134](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-130-320.jpg)

![Integrais de Funções Vetoriais sobre Curvas em R3
curva C ⊂ R3 pertence a reta podemos eliminar z = y na equação
da esfera e temos:
2(x−a)2 +(y −a)2 = a2 , podemos propor como parametrização sa√
2
tisfazendo a equação acima: y = a + a sin(t) e x = a +
a cos(t).
2
Como z = x temos:
√
2
z =a+
a cos(t).
2
Resumindo temos a seguinte parametrização para a intersecção da
esfera como √
plano dados:
x = a + 2 a cos(t)
2
y = a + a sin(t)
∀t ∈ [−π, +π] .
√
z = a + 2 a cos(t)
2
Podemos √
escrever o vetor posição r como:
√
2
2
a cos(t))i + (a + a sin(t))j + (a +
a cos(t))k Derik.
r = (a +
2
2
vando o vetor posição r
r(t) com relação a t temos:
√
√
r
dr
r(t)
2
2
=−
a sin(t)i + a cos(t)j −
a sin(t)k
dt
2
2
Ao longo da curva C ⊂ R3 o campo de força é dado por:
F (t) = Ki + Ka(1 + sin(t))j + Kk
k.
Fazendo o produto escalar de F (t) por
r
dr
r(t)
F (t) •
dt
r
dr
r(t)
temos:
dt
√
2
Ka sin(t) + Ka2 (1 + sin(t)) cos(t) −
2
√
2
Ka sin(t)
−
2
√
= − 2Ka sin(t) + Ka2 (1 + sin(t)) cos(t)
= −
Calculando o trabalho realizado pela força F (t) ao longo da curva
136](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-132-320.jpg)


![Cálculo III
AULA
como circulação e fluxo sobre curvas estão intimamente ligados à
7
Física.
RESUMO
Seja C ⊂ R3 , uma curva contínua e lisa, parametrizada por
comprimento de arco e
: C ⊂ R3 → R+ , a densidade linear de
massa de C onde: ∀(x, y, z) ∈ C, (x, y, z) > 0.
Massa
A massa de C ⊂ R3 , denotada m(C), é definida por:
m(C) =
(x, y, z)ds
C
Momento de Massa relativo aos planos yz xz e xy
yz,
xy.
O momento de massa de C ⊂ R3 relativo ao plano yz, xz e xy denotados Myz (C), Mxz (C) e Mxy (C) são definidos respectivamente
por:
Myz (C) =
(x, y, z)xds
C
Mxz (C) =
(x, y, z)yds
C
Mxy (C) =
(x, y, z)zds
C
Se a curva C ⊂ R3 é dada parametricamente por: x = x(t), y =
ˆ
y (t) e z = z (t), t ∈ [a, b], a massa, momento de massa relativo aos
ˆ
ˆ
planos yz, xz e xy, respectivamente pode ser calculados por:
139](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-135-320.jpg)

![Cálculo III
AULA
Se a curva C ⊂ R3 é dada parametricamente por: x = x(t), y =
ˆ
7
y (t) e z = z (t), t ∈ [a, b], o momento de inércia relativo aos eixos
ˆ
ˆ
x, y e z, respectivamente pode ser calculados por:
b
v
(ˆ(t), y (t), z (t))(ˆ2 (t) + z 2 (t))|v
x
ˆ
ˆ
y
ˆ
v(t)|dt
Ix (C) =
a
b
v
(ˆ(t), y (t), z (t))(ˆ2 (t) + z 2 (t))|v
x
ˆ
ˆ
x
ˆ
v(t)|dt
Iy (C) =
a
b
v
(ˆ(t), y (t), z (t))(ˆ2 (t) + y 2 (t))|v
x
ˆ
ˆ
x
ˆ
v(t)|dt
Iz (C) =
a
Fluxo Integral de Escoamento.
Seja um campo de vetores F : D ⊂ R3 → R3 e uma curva C ⊂ D
contínua e suave. Definimos o fluxo integral de escoamento do
campo vetorial F ao longo da curva C ⊂ R3 por:
F • T ds
Φ(F, C) =
C
Alternativamente se a curva C ⊂ R3 é representada vetorialmente
por: r = x(t)i + y (t)j + z (t)k t ∈ [a, b] e o campo vetorial F :
ˆ
ˆ
ˆ k,
D ⊂ R3 → R3 por: F = f1 (x, y, z)i + f2 (x, y, z)j + f3 (x, y, z)k
k,
com f1 , f2 , f3 : D ⊂ R3 → R são funções de valores reais, o fluxo
integral de escoamento pode ser escrito como:
r
F • dr
T (F, C) =
C
T (F, C) =
(f1 dx + f2 dy + f3 dz)
C
b
T (F, C) =
f1
a
dˆ(t)
x
dˆ(t)
y
dˆ(t)
z
+ f2
+ f3
dt
dt
dt
dt
Campo Conservativo.
Sejam F : D ⊂ R3 → R3 um campo vetorial, dois pontos A, B ∈ D.
141](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-137-320.jpg)
![Integrais de Funções Vetoriais sobre Curvas em R3
B
( ) • dr é constante ∀C ⊂ D parametrizada por: x = x(t),
(F
ˆ
Se
A
y = y (t) e z = z (t), t ∈ [a, b] tal que A = C(a) e B = C(b) dizemos
ˆ
ˆ
que F é um campo conservativo em D.
Gradiente.
Sejam f : D ⊂ R3 → R uma função derivável de valores reais.
Definimos o gradiente de f , denotado
f , como o campo vetorial
f : D ⊂ R3 → R3 dado por:
def
f =
∂f
∂f
∂f
i+
j+
k
∂x
∂y
∂z
Função Potencial.
Sejam F : D ⊂ R3 → R3 um campo vetorial e f : D ⊂ R3 → R
uma função derivável de valores reais tais que F =
f então, f é
dita uma função potencial para o campo vetorial F em D
PRÓXIMA AULA
Em nossa próxima aula veremos, essencialmente, integração
de funções reais e campos vetoriais (funções vetoriais) sobre superfícies S ⊂ R3 . Veremos também como calcular área, massa,
momento de massa e centro de massa de superfícies.
ATIVIDADES
Deixamos como atividades os seguintes problemas envolvendo
integração de campos vetoriais sobre curvas no espaço.
142](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-138-320.jpg)
![Cálculo III
ATIV. 7.1. Seja F : R3 → R3 o campo vetorial dado por: F (x, y, z) =
AULA
7
y(2xyz 2 + exy )i + x(2xyz 2 + exy )j + 2x2 y 2 zk
k:
• Mostre que campo vetorial F é conservativo.
• Determine uma função potencial f : R3 → R tal que F =
f.
Comentário:
Volte ao texto e reveja com calma e atenção os
problemas resolvidos acima, eles lhe servirão de guia.
ATIV. 7.2. Sejam F : R3 → R3 o campo vetorial dado por:
F (x, y, z) = yi + zj + bk b = 0 e C ⊂ R3 a curva no espaço dada
k,
por r
r(t) = a cos(t)i + a sin(t)j + ck ∀t ∈ [0, 2π], a, c > 0. Deterk,
mine o trabalho realizado por F ao longo da curva C.
Comentário:
Volte ao texto e reveja com calma e atenção os
problemas resolvidos acima, eles lhe servirão de guia.
LEITURA COMPLEMENTAR
ÁVILA, Geraldo, Cálculo 3: Funções de Várias Variáveis, Livros
Técnicos e Científicos Editora, São Paulo, 3a edição, 1982.
LEITHOLD, Louis, O Cálculo com Geometria Analítica. Volume
2, Editora Harbra, 1994.
STEWART, James,Cálculo. Volume 3, 5a edição, Editora CENGAGE Learning, 2009.
SWOKOWSKI, Earl E., Cálculo com Geometria Analítica, Volume
2, 2a edição, Makron Books do Brásil SP, 1994.
143](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-139-320.jpg)


![Integrais de Superfícies
8.1
Introdução
Caros alunos nossa aula de hoje “Integrais de Superfícies” tem,
como a nossa aula anterior “Integrais de Funções Vetoriais sobre
Curvas em R3 ”, um sabor de física. Desde a determinação da
massa, momento de massa e centro de massa de uma superfície
até a determinação do fluxo de um campo vetorial através de uma
superfície. Da mesma forma que na aula anterior, vocês devem
ater-se apenas aos aspectos matemáticos da matéria abordada.
8.2
Superfícies em R3
Bom, vamos começar, bem do começo, com algumas formas de
representação de superfícies. A primeira forma de representação
de uma superfície é considerar uma função f : D ⊂ R3 → R e
tomar um ponto c ∈ Img(f ) da imagem de f . Desta forma, de
modo geral, f (x, y, z) = c representa uma superfície S ⊂ R3 .
Exemplo 8.1. Sejam a, b, c > 0 e f : R3 → R dada por: f (x, y, z) =
x2 y 2 z 2
+ + . Desta forma f (x, y, z) = d representa elipsóides para
a2 b2 c2
valores positivos de d.
Outra forma de representação de uma superfície é através de uma
parametrização. Representar S ⊂ R3 por: x = x(u, v), y = y (u, v)
ˆ
ˆ
e z = z (u, v), ∀(u, v) ∈ [a, b] × [c, d].
ˆ
Exemplo 8.2. Tomando o exemplo anterior podemos parametri√
√
zar os elipsóides por: x = a d cos(u) cos(v), y = b d sin(u) cos(v)
√
e z = c d sin(v), ∀(u, v) ∈ [−π, +π] × [−π, +π].
146](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-142-320.jpg)








![Cálculo III
a integral dupla como:
√
2 2π a
(r cos(ϑ))2 + (r sin(ϑ))2 rdrdϑ
Mxy (S) =
2 0
0
√
2 2π a
=
r2 cos2 (ϑ) + r2 sin2 (ϑ)rdrdϑ
2 0
0
√
2 2π a √ 2
=
r rdrdϑ
2
√ 0 2π 0 a
2
=
r2 drdϑ
2 0
0
√
2 2π r3 a
=
dϑ
2 0 3 0
√
a2 2 2π
dϑ
=
6
0
√
2 2π
=
ϑ
6 √0
a3 2
= π
3
AULA
8
O valor de z será dado por:
¯
√
a3 2
π
Mxy (S)
3 = 2a
√
=
z=
¯
2 2
m(S)
3
a
π
2
8.5
Superfícies Parametrizadas
Nesta seção veremos como calcular integrais de superfícies para
superfícies parametrizadas.
Seja uma superfície lisa S ⊂ R3 parametrizada por: x = x(u, v),
ˆ
y = y (u, v) e z = z (u, v), ∀(u, v) ∈ [a, b] × [c, d] onde x, y e z
ˆ
ˆ
ˆ ˆ ˆ
possuem derivadas contínuas com relação a u e a v. Podemos
representar a superfície pelo vetor posição r v) = x(u, v)i +
r(u,
ˆ
y (u, v)j + z (u, v)k Representaremos as derivadas do vetor r com
ˆ
ˆ
k.
relação a u e a v respectivamente por r u , r v . Consideraremos em
R = [a, b] × [c, d] as quatro retas u = u0 , u = u0 + ∆u, v = v0 e
155](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-151-320.jpg)

![Cálculo III
AULA
paralelogramo também não é nula. Podemos então fazer um par-
8
tição da região R do plano uv e mapeando-a pela parametrização
sobre a superfície S. Aproximando cada ∆σuv pela área do paralelogramo associado podemos aproximar a área de S pela soma de
Riemann:
r
|r u × r v |∆u∆v.
u
v
Fazendo ∆u e ∆v tenderem a zero independentemente, a continuidade das derivadas r v do vetor posição garante que a soma de
Riemann aproxime-se da integral dupla que dá a área Are(S) da
superfície S i.e.
b
d
r
|r u × r v |dudv.
Are(S) =
a
c
Esta argumentação heurística nos permite estender os conceitos
acima desenvolvidos para definir a integral de uma função f : S ⊂
R3 → R definida sobre a superfície S da seguinte forma:
Definição 8.1. Sejam S ⊂ R3 uma superfície lisa definida parametricamente por r v) = x(u, v)i + y (u, v)j + z (u, v)k ∀(u, v) ∈
r(u,
ˆ
ˆ
ˆ
k,
[a, b] × [c, d] e f : S ⊂ R3 → R uma função de valores reais definida
sobre S então, a integral de f sobre S será:
b
def
d
r r
f (ˆ(u, v), y (u, v), z (u, v))|r u ×r v |dudv.
x
ˆ
ˆ
f (x, y, z)dσ =
S
a
c
Um conceito, vindo da Física, muito importante é o do fluxo de
um campo vetorial através de uma superfície no espaço. Como
exemplo temos o fluxo de massa (massa por unidade de tempo por
unidade de área) de um fluido que é calculado através do seu campo
de velocidade e da sua densidade de massa. Vamos à definição:
Definição 8.2. Sejam S ⊂ R3 uma superfície lisa no espaço e
F : S ⊂ R3 → R3 uma função de valores vetoriais. Definimos o
157](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-153-320.jpg)
![Integrais de Superfícies
fluxo de F através de S, denotado φ(F ), por:
def
F (x, y, z) • n
ndσ.
φ(F ) =
S
Onde n é a normal unitária em S.
OBS 8.1. Alternativamente, se S ⊂ R3 é lisa e definida parametricamente por r v) = x(u, v)i + y (u, v)j + z (u, v)k ∀(u, v) ∈
r(u,
ˆ
ˆ
ˆ
k,
[a, b] × [c, d] e F : S ⊂ R3 → R3 uma função de valores vetoriais.
O fluxo de F através de S, é dado por:
b
d
F (ˆ(u, v), y (u, v), z (u, v)) • n r u × r v |dudv.
x
ˆ
ˆ
n|r
φ(F ) =
a
c
1
r r
·(r u ×r v )
ru × rv |
|r
a integral para o fluxo do campo vetorial F através da superfície
Como podemos calcular o vetor normal por n =
S pode ser reescrita como:
b
d
r
F (ˆ(u, v), y (u, v), z (u, v)) • (r u × r v )dudv.
x
ˆ
ˆ
φ(F ) =
a
c
Vejamos um exemplo envolvendo a determinação do fluxo de um
campo vetorial através de uma superfície no espaço.
Exemplo 8.5. Determine o fluxo do campo vetorial F : R3 → R3
dado por F (x, y, z) = zi + zj + xyk através da superfície do parabolóide z = a2 − x2 − y 2 , que fica acima do plano z = 0 (ver Fig.
8.7).
SOLUÇÃO: Começaremos por parametrizar a superfície do parabolóide fazendo x = v cos(u), y = v sin(u) e z = a2 − v 2 . Desta
ˆ
ˆ
forma o vetor posição para a superfície fica expresso por:
r v) = v cos(u)i + v sin(u)j + (a2 − v 2 )k
r(u,
k.
158](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-154-320.jpg)



![Cálculo III
AULA
8
Onde n é a normal unitária em S.
Área de uma Superfície S ⊂ R3 Parametrizada
Sejam S ⊂ R3 uma superfície lisa definida parametricamente por
r v) = x(u, v)i + y (u, v)j + z (u, v)k ∀(u, v) ∈ [a, b] × [c, d] então,
r(u,
ˆ
ˆ
ˆ
k,
a área de S será:
b
d
r
|r u × r v |dudv.
Are(S) =
a
c
Integral de Superfície S ⊂ R3 Parametrizada
Sejam S ⊂ R3 uma superfície lisa definida parametricamente por
r v) = x(u, v)i + y (u, v)j + z (u, v)k ∀(u, v) ∈ [a, b] × [c, d] e
r(u,
ˆ
ˆ
ˆ
k,
f : S ⊂ R3 → R uma função de valores reais definida sobre S
então, a integral de f sobre S será:
b
def
d
r r
f (ˆ(u, v), y (u, v), z (u, v))|r u ×r v |dudv.
x
ˆ
ˆ
f (x, y, z)dσ =
S
a
c
Fluxo de um Campo Vetorial Através de uma Superfície
S ⊂ R3 Parametrizada
Se S ⊂ R3 é lisa e definida parametricamente por r v) = x(u, v)i
r(u,
ˆ
i+
y (u, v)j + z (u, v)k ∀(u, v) ∈ [a, b] × [c, d] e F : S ⊂ R3 → R3 uma
ˆ
k,
ˆ
função de valores vetoriais. O fluxo de F através de S, é dado por:
b
d
F (ˆ(u, v), y (u, v), z (u, v)) • n r u × r v |dudv.
x
ˆ
ˆ
n|r
φ(F ) =
a
c
1
r r
·(r u ×r v )
r
|r u × r v |
a integral para o fluxo do campo vetorial F através da superfície
Como podemos calcular o vetor normal por n =
163](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-159-320.jpg)














![AULA
Cálculo III
C1 : x = b cos(t)
y = b sin(t)
t ∈ [0, 2π]
9
C2 : x = a cos(t) y = −a sin(t) t ∈ [0, 2π]
onde a < b, C1 é percorrida no sentido anti-horário e C2 no sentido horário. Verificar o teorema de Green para os dados campo
vetorial e região.
SOLUÇÃO: Como o campo vetorial F (x, y) = −x2 yi + xy 2j temos suas componentes dadas por f1 (x, y) = −x2 y e f2 (x, y) = xy 2
∂f1 ∂f2
e temos as derivadas
e
dadas por:
∂y
∂x
∂f1
∂y
=
=
(x2 + y 2 )(−1) − (−y)(2y)
(x2 + y 2 )2
x2 − y 2
(x2 + y 2 )2
e
∂f2
∂x
=
=
Portanto
(x2 + y 2 )(+1) − (−x)(2x)
(x2 + y 2 )2
x2 − y 2
(x2 + y 2 )2
∂f1
∂f2
=
e temos:
∂y
∂x
R
∂f2 ∂f1
−
∂x
∂y
dxdy = 0
Calculando a integral de linha em C1 temos:
179](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-175-320.jpg)



![AULA
Cálculo III
9.7
Aplicação do Teorema de Stokes
9
Caros alunos, nesta seção faremos uma aplicação do teorema
de Stokes. A saber:
Figura 9.10: Verificação do teorema de Stokes
Exemplo 9.2. Considere a campo vetorial F : R3 → R3 dado por
F (x, y) = (yz + xz)i + (xz + x)j + (xy − y 2 /2)k e a Curva C na
qual o plano z = a > 0 corta o cone z =
x2 + y 2 (ver Fig. 9.10)
e determine a circulação de F ao longo de C.
SOLUÇÃO: Para determinação da circulação de F ao longo de C
usaremos o teorema de Stokes. Percorrer C no sentido anti-horário
visto de cima corresponde a tomar a normal n ao cone apontando
para dentro.
O cone pode ser parametrizado por:
r ϑ) = ar cos(ϑ)i + ar sin(ϑ)j + ark ∀r ∈ [0, 1], ∀ϑ ∈ [0, 2π]
r(r,
k,
As derivadas parciais r r e r ϑ são dadas por:
183](https://image.slidesharecdn.com/livrode-140209103834-phpapp02/85/Livro-de-calculo-3-179-320.jpg)


















Esta aula introduz o conceito de integral dupla, definida como a extensão natural da integral simples para funções de dois argumentos com domínio em R2. A integral dupla é calculada para domínios retangulares através de partições que dividem o domínio em retângulos menores, permitindo aproximar a integral por somas de Riemann.



































![[Solução] cálculo com geometria leithold](https://cdn.slidesharecdn.com/ss_thumbnails/soluoclculocomgeometria-leitholdvol-150224102157-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)