Baixado 15 vezes

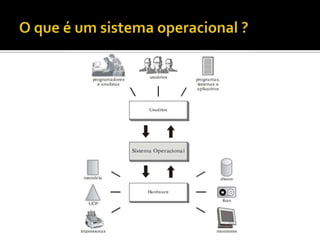

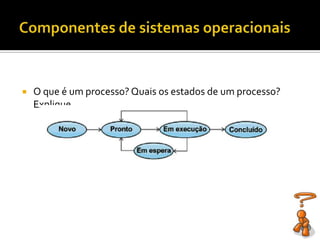
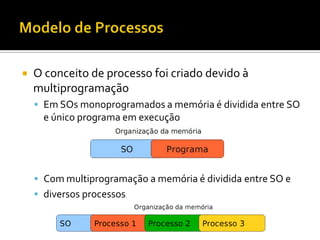
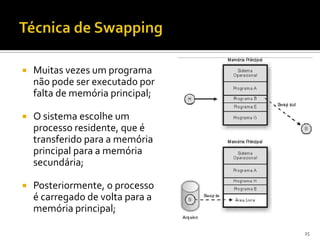

O documento discute os conceitos fundamentais de sistemas operacionais, incluindo gerenciamento de memória e escalonamento de processos. É dividido em vários capítulos tratando de tópicos como componentes dos sistemas operacionais, comunicação entre processos, alocação e troca de memória.