AUTOVETORES E AUTOVALORES
Definição
SejaV um espaço vetorial de dimensão finita e T : V → V um operador linear. Um
vetor v ∈ V não nulo é chamado de autovetor de T se existe λ ∈ R, chamado
autovalor, tal que
Tv = λv
Neste caso, dizemos que v é um autovetor associado ao autovalor λ
2 / 52
3.
Exemplo 1.
Considere ooperador linear T : R2 ⇒ R2 definido por
T(x, y) = (x + 2y, 3x + 2y).
Determine se os seguintes vetores são autovetores de T, e em caso afirmativo
determine seus autovalores associados.
u = (1, −1), v = (2, 3) e w = (1, 2).
3 / 52
Exemplo 2.
Considere ooperador linear T : R3 ⇒ R3 definido por
T(x, y, z) = (x + y + z, 2y + z, 2y + 3z).
Determine se os seguintes vetores são autovetores de T, e em caso afirmativo
determine seus autovalores associados.
u = (1, 0, 0), v = (0, 1, −1) e w = (1, 1, 2).
5 / 52
Polinômio caracterı́stico
Seja Vum espaço vetorial de dimensão finita e T : V ⇒ V um operador linear.
Queremos determinar um processo para calcular os autovetores e os autovalores de T,
mas para isso precisamos da seguinte definição
Definição.
Seja V um R-espaço vetorial de dimensão finita e T : V → V um operador linear. Se
β é uma base de V , o polinômio
p(t) = det(tI − [T]β
β)
é chamado polinômio caracaterı́stico de T
7 / 52
Observação.
Da definição dedeterminante, podemos observar que o grau do polinômio
caracterı́sticos p(t) é igual a ordem de [T]β
β, que é igual a dimensão de V .
Proposição.
Sejam V um R-espaço vetorial de dimensão finita e T : V → V um operador linear
com polinômio caracterı́stico p(t). Então λ ∈ R é um autovalor de T se, e somente se,
λ é raiz de p(t)
12 / 52
13.
Exemplo 5.
Determine todosos autovalores e autovetores dos operadores lineares abaixo:
1 T : R2 → R2, T(x, y) = (x + 2y, 3x + 2y)
2 T : R3 → R3, T(x, y, z) = (x + y + z, 2y + z, 2y + 3z)
13 / 52
Contexto matricial
Os conceitosde autovetores, autovalores e polinômio caracterı́s-
ticos podem ser analisados no contexto matricial.
Definição
Seja A ∈ Mn×n(R). Um vetor não nulo v ∈ Mn×n(R) é chamado autovetor de A se
existe λ ∈ R, chamado autovalor de A, tal que
Av = λv
Observação. Os autovalores de A são as raı́zes dos polinômios caracterı́sticos de A.
16 / 52
17.
Contexto matricial
Definição.
Duas matrizesA, B ∈ Mn×n são chamadas matrizes semelhantes se existe uma matriz
inversı́vel P ∈ Mn×n(R) tal que
A = P−1BP.
Observação. Duas matrizes semelhantes possuem o mesmo polinômio caracterı́stico.
17 / 52
18.
AUTOVETORES E AUTOVALORES
Contextomatricial
Exemplo 6 Determine os autovalores e os correspondentes autovetores de A:
1
A =
2 1
3 4
2
A =
1 −1 0
2 3 2
1 1 2
18 / 52
Contexto matricial
Observação
Existem operadoresque não possuem autovalores (nem autovetores). Por exemplo,
seja T : R2 → R2 definido por:
T(x, y) = (x + y, −2x − y).
Então
[T]C
C =
1 1
−2 −1
⇒ p(t) = det
t − 1 −1
2 t + 1
= t2
+ 1.
Como p(t) = t2 + 1 não possui raiz em R, logo T não possui autovalor (nem
autovetor).
21 / 52
22.
AUTOESPAÇO
Proposição.
Sejam V emR-espaço vetorial de dimensão finita e T : V → V um operador linear. Se
λ é um autovalor de T, o subconjunto Sλ = {v ∈ V.Tv = λv} formado pelos
autovetores associados a λ e o vetor 0, é um subspaço vetorial de V .
22 / 52
Exemplo 8.
Seja T: R2 → R2 com T(x, y) = (x + 2y, 3x + 2y). Já vimos que os autovalores de T
são −1 e 4, e que os estoespaços associados a −1 e 4 são respectivamente
S−1 = {(x, −x); x ∈ R} = [(1, −1)],
S4 =
(x,
3
2
x); x ∈ R
=
(1,
3
2
)
= [(2, 3)]
24 / 52
25.
Exemplo 9.
Seja T: R3 → R3 com T(x, y, z) = (x + y + z, 2y + z, 2y + 3z). Já vimos que os
autovalores de T são 1 e 4, e que os estoespaços associados a 1 e 4 são respectivamente
S1 = {(x, y, −y); x, y ∈ R} = [(1, 0, 0), (0, 1, −1)],
S4 = {(x, x, 2x); x ∈ R} = [(1, 1, 2)]
25 / 52
Exercı́cios
Ache os autovalorese autovetores correspondentes das transformações lineares dadas:
1 T : R2 → R2, tal que T(x, y) = (2y, x)
2 T : R2 → R2, tal que T(x, y) = (x + 4y, 2x + 3y)
3 T : R3 → R3, tal que T(x, y, z) = (3x − y + z, −x + 5y − z, x − y + 3z)
28 / 52
29.
Exercı́cios
1 Encontre atransformação linear T : R2 → R2 tal que T tenha autovalores −2 e 3
associados aos autovetores (3y, y) e (−2y, y) respectivamente.
2 Se λ é autovalor da transformação linear T : V → V e v um autovetor associado
a ele, mostre que kv é outro autovetor associado a λ se k 6= 0.
29 / 52
DIAGONALIZAÇÃO DE OPERADORES
Definição
SejaV um espaço vetorial de dimensão finita e T : V → V um operador linear.
Dizemos que T é diagonalizável se existir uma base de V formada por autovetores de
T.
32 / 52
Exemplo 1
Seja T: R2 → R2 com
T(x, y) = (x + 2y, 3x + 2y).
Como β = {(1, −1), (2, 3)} é uma base de V = R2 formada por autovetores de T,
concluı́mos que T é diagonalizável.
Note ainda que a matriz de T na base β
[T]β
β =
−1 0
0 4
é uma matriz diagonal cujos elementos da diagonal principal são os autovalores de T.
34 / 52
35.
Exemplo 1
Seja T: R2 → R2 com
T(x, y) = (x + 2y, 3x + 2y).
Como β = {(1, −1), (2, 3)} é uma base de V = R2 formada por autovetores de T,
concluı́mos que T é diagonalizável.
Note ainda que a matriz de T na base β
[T]β
β =
−1 0
0 4
é uma matriz diagonal cujos elementos da diagonal principal são os autovalores de T.
34 / 52
36.
Exemplo 2
Seja T: R3 → R3 definida por
T(x, y, z) = (x + y + z, 2y + z, 2y + 3z).
Como β = {(1, 0, 0), (0, 1, −1), (1, 1, 2)} é uma base de V = R3 (verificar) formada
por autovetores de T, então T é diagonalizável.
A matriz de T na base β
[T]β
β =
1 0 0
0 1 0
0 0 4
é uma matriz diagonal cujos elementos da diagonal principal são os autovalores de T.
35 / 52
37.
Exemplo 2
Seja T: R3 → R3 definida por
T(x, y, z) = (x + y + z, 2y + z, 2y + 3z).
Como β = {(1, 0, 0), (0, 1, −1), (1, 1, 2)} é uma base de V = R3 (verificar) formada
por autovetores de T, então T é diagonalizável.
A matriz de T na base β
[T]β
β =
1 0 0
0 1 0
0 0 4
é uma matriz diagonal cujos elementos da diagonal principal são os autovalores de T.
35 / 52
Exemplo 3
A matrizreal
A =
2 1
3 4
é diagonalizável, pois β = {(1, −1), (1, 3)} é uma base de R2 formada por autovetores
de A.
37 / 52
40.
Exemplo 3
Note que,sendo
P =
1 1
−1 3
a matriz cujas colunas são os vetores da base β, então
P−1
=
1
4
3 −1
1 1
Observação P é a matriz de mudança de base de β para a base canônica do R2
38 / 52
41.
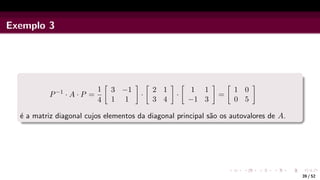
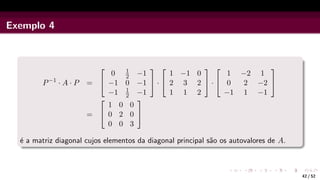
Exemplo 3
P−1
· A· P =
1
4
3 −1
1 1
·
2 1
3 4
·
1 1
−1 3
=
1 0
0 5
é a matriz diagonal cujos elementos da diagonal principal são os autovalores de A.
39 / 52
42.
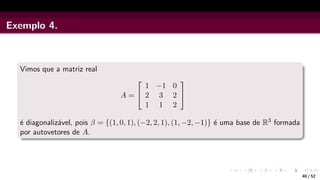
Exemplo 4.
Vimos quea matriz real
A =
1 −1 0
2 3 2
1 1 2
é diagonalizável, pois β = {(1, 0, 1), (−2, 2, 1), (1, −2, −1)} é uma base de R3 formada
por autovetores de A.
40 / 52
43.
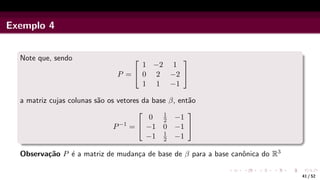
Exemplo 4
Note que,sendo
P =
1 −2 1
0 2 −2
1 1 −1
a matriz cujas colunas são os vetores da base β, então
P−1
=
0 1
2 −1
−1 0 −1
−1 1
2 −1
Observação P é a matriz de mudança de base de β para a base canônica do R3
41 / 52
Resultados Auxiliares
Proposição
Seja T: V → V um operador linear. Se vi for um autovetor de T associado ao
autovalor λi ∈ K, e se λi 6= λj para i 6= j, então o conjunto {v1, ..., vn} é linearmente
independente. Em outras palavras Autovetores associados a Autovalores distintos são
L.I.
Corolário
Se dimV = n e T : V → V possui n autovalores distintos, então T é diagonalizável.
Observação a proposição e o corolário anterior podem ser dados no contexto matricial.
43 / 52
46.
Resultados Auxiliares
Proposição
Seja T: V → V um operador linear. Se vi for um autovetor de T associado ao
autovalor λi ∈ K, e se λi 6= λj para i 6= j, então o conjunto {v1, ..., vn} é linearmente
independente. Em outras palavras Autovetores associados a Autovalores distintos são
L.I.
Corolário
Se dimV = n e T : V → V possui n autovalores distintos, então T é diagonalizável.
Observação a proposição e o corolário anterior podem ser dados no contexto matricial.
43 / 52
Exemplo 5. Solução
1Já vimos num exemplo anterior que 1 e 5 são autovalores de A. como A tem
ordem 2 e possui dois autovalores distintos, logo, pelo corolário, A é
diagonalizável.
2 Já vimos no exemplo anterior que 1, 2 e 3 são autovalores de A. como A tem
ordem 3 e possui três autovalores distintos, logo, pelo corolário, A é
diagonalizável.
45 / 52
49.
Exemplo 5. Solução
1Já vimos num exemplo anterior que 1 e 5 são autovalores de A. como A tem
ordem 2 e possui dois autovalores distintos, logo, pelo corolário, A é
diagonalizável.
2 Já vimos no exemplo anterior que 1, 2 e 3 são autovalores de A. como A tem
ordem 3 e possui três autovalores distintos, logo, pelo corolário, A é
diagonalizável.
45 / 52
50.
Observação
A recı́proca docorolário anterior é falsa.
Vimos que o operadro T : R3 → R3 definido por
T(x, y, z) = (x + y + z, 2y + z, 2y + 3z)
não possui três autovalores distintos (os autovalores de T são 1 e 4). Mas, mesmo
assim T é diagonalizável.
46 / 52
51.
Resultados Auxiliares
Teorema
Seja T: V → V um operador linear. T é diagonalizável, se e somente se, existe uma
base β de V tal que [T]β é diagonalizável.
Teorema
Seja A ∈ Mn×n. Então A é diagonalizável se, e somente se, A é semelhante a uma
matriz diagonal D. Neste caso, D = P−1AP em que P é uma matriz cujas colunas
formam uma base de autovetores de A e D é uma matriz diagonal cujos elementos da
diagonal principal são os autovalores de A.
47 / 52
52.
Resultados Auxiliares
Teorema
Seja T: V → V um operador linear. T é diagonalizável, se e somente se, existe uma
base β de V tal que [T]β é diagonalizável.
Teorema
Seja A ∈ Mn×n. Então A é diagonalizável se, e somente se, A é semelhante a uma
matriz diagonal D. Neste caso, D = P−1AP em que P é uma matriz cujas colunas
formam uma base de autovetores de A e D é uma matriz diagonal cujos elementos da
diagonal principal são os autovalores de A.
47 / 52
Exercı́cio
Exercı́cio 2. Considere
21 −1
4 1 −3
0 1 1
1 Determine os autovalores de A.
2 Determine os autoespaços de A
3 A é diagonalizável? Justifique.
50 / 52
56.
Exercı́cio
Exercı́cio 3. SejaT : R3 → R3 um operadro linear descrito por
T(x, y, z) = (x + 2y + 2z, 2x + y + 2z, −z)
1 Determine os autovalores e os autovetores de T.
2 Determine os autoespaços de A
3 T é diagonalizável? Justifique. Em caso afirmativo exiba uma base em relação a
qual a matriz de T é diagonalizável.
51 / 52



![Polinômio caracterı́stico
Seja V um espaço vetorial de dimensão finita e T : V ⇒ V um operador linear.
Queremos determinar um processo para calcular os autovetores e os autovalores de T,
mas para isso precisamos da seguinte definição
Definição.
Seja V um R-espaço vetorial de dimensão finita e T : V → V um operador linear. Se
β é uma base de V , o polinômio
p(t) = det(tI − [T]β
β)
é chamado polinômio caracaterı́stico de T
7 / 52](https://image.slidesharecdn.com/aula141-250708000430-55a799c5/85/frasede40digitosparamarcaraaaulaqueeunaoligo-7-320.jpg)


![Observação.
Da definição de determinante, podemos observar que o grau do polinômio
caracterı́sticos p(t) é igual a ordem de [T]β
β, que é igual a dimensão de V .
Proposição.
Sejam V um R-espaço vetorial de dimensão finita e T : V → V um operador linear
com polinômio caracterı́stico p(t). Então λ ∈ R é um autovalor de T se, e somente se,
λ é raiz de p(t)
12 / 52](https://image.slidesharecdn.com/aula141-250708000430-55a799c5/85/frasede40digitosparamarcaraaaulaqueeunaoligo-12-320.jpg)




![Contexto matricial
Observação
Existem operadores que não possuem autovalores (nem autovetores). Por exemplo,
seja T : R2 → R2 definido por:
T(x, y) = (x + y, −2x − y).
Então
[T]C
C =
1 1
−2 −1
⇒ p(t) = det
t − 1 −1
2 t + 1
= t2
+ 1.
Como p(t) = t2 + 1 não possui raiz em R, logo T não possui autovalor (nem
autovetor).
21 / 52](https://image.slidesharecdn.com/aula141-250708000430-55a799c5/85/frasede40digitosparamarcaraaaulaqueeunaoligo-21-320.jpg)
![Exemplo 8.
Seja T : R2 → R2 com T(x, y) = (x + 2y, 3x + 2y). Já vimos que os autovalores de T
são −1 e 4, e que os estoespaços associados a −1 e 4 são respectivamente
S−1 = {(x, −x); x ∈ R} = [(1, −1)],
S4 =
(x,
3
2
x); x ∈ R
=
(1,
3
2
)
= [(2, 3)]
24 / 52](https://image.slidesharecdn.com/aula141-250708000430-55a799c5/85/frasede40digitosparamarcaraaaulaqueeunaoligo-24-320.jpg)
![Exemplo 9.
Seja T : R3 → R3 com T(x, y, z) = (x + y + z, 2y + z, 2y + 3z). Já vimos que os
autovalores de T são 1 e 4, e que os estoespaços associados a 1 e 4 são respectivamente
S1 = {(x, y, −y); x, y ∈ R} = [(1, 0, 0), (0, 1, −1)],
S4 = {(x, x, 2x); x ∈ R} = [(1, 1, 2)]
25 / 52](https://image.slidesharecdn.com/aula141-250708000430-55a799c5/85/frasede40digitosparamarcaraaaulaqueeunaoligo-25-320.jpg)





![Exemplo 1
Seja T : R2 → R2 com
T(x, y) = (x + 2y, 3x + 2y).
Como β = {(1, −1), (2, 3)} é uma base de V = R2 formada por autovetores de T,
concluı́mos que T é diagonalizável.
Note ainda que a matriz de T na base β
[T]β
β =
−1 0
0 4
é uma matriz diagonal cujos elementos da diagonal principal são os autovalores de T.
34 / 52](https://image.slidesharecdn.com/aula141-250708000430-55a799c5/85/frasede40digitosparamarcaraaaulaqueeunaoligo-34-320.jpg)
![Exemplo 1
Seja T : R2 → R2 com
T(x, y) = (x + 2y, 3x + 2y).
Como β = {(1, −1), (2, 3)} é uma base de V = R2 formada por autovetores de T,
concluı́mos que T é diagonalizável.
Note ainda que a matriz de T na base β
[T]β
β =
−1 0
0 4
é uma matriz diagonal cujos elementos da diagonal principal são os autovalores de T.
34 / 52](https://image.slidesharecdn.com/aula141-250708000430-55a799c5/85/frasede40digitosparamarcaraaaulaqueeunaoligo-35-320.jpg)
![Exemplo 2
Seja T : R3 → R3 definida por
T(x, y, z) = (x + y + z, 2y + z, 2y + 3z).
Como β = {(1, 0, 0), (0, 1, −1), (1, 1, 2)} é uma base de V = R3 (verificar) formada
por autovetores de T, então T é diagonalizável.
A matriz de T na base β
[T]β
β =
1 0 0
0 1 0
0 0 4
é uma matriz diagonal cujos elementos da diagonal principal são os autovalores de T.
35 / 52](https://image.slidesharecdn.com/aula141-250708000430-55a799c5/85/frasede40digitosparamarcaraaaulaqueeunaoligo-36-320.jpg)
![Exemplo 2
Seja T : R3 → R3 definida por
T(x, y, z) = (x + y + z, 2y + z, 2y + 3z).
Como β = {(1, 0, 0), (0, 1, −1), (1, 1, 2)} é uma base de V = R3 (verificar) formada
por autovetores de T, então T é diagonalizável.
A matriz de T na base β
[T]β
β =
1 0 0
0 1 0
0 0 4
é uma matriz diagonal cujos elementos da diagonal principal são os autovalores de T.
35 / 52](https://image.slidesharecdn.com/aula141-250708000430-55a799c5/85/frasede40digitosparamarcaraaaulaqueeunaoligo-37-320.jpg)
![Resultados Auxiliares
Teorema
Seja T : V → V um operador linear. T é diagonalizável, se e somente se, existe uma
base β de V tal que [T]β é diagonalizável.
Teorema
Seja A ∈ Mn×n. Então A é diagonalizável se, e somente se, A é semelhante a uma
matriz diagonal D. Neste caso, D = P−1AP em que P é uma matriz cujas colunas
formam uma base de autovetores de A e D é uma matriz diagonal cujos elementos da
diagonal principal são os autovalores de A.
47 / 52](https://image.slidesharecdn.com/aula141-250708000430-55a799c5/85/frasede40digitosparamarcaraaaulaqueeunaoligo-51-320.jpg)
![Resultados Auxiliares
Teorema
Seja T : V → V um operador linear. T é diagonalizável, se e somente se, existe uma
base β de V tal que [T]β é diagonalizável.
Teorema
Seja A ∈ Mn×n. Então A é diagonalizável se, e somente se, A é semelhante a uma
matriz diagonal D. Neste caso, D = P−1AP em que P é uma matriz cujas colunas
formam uma base de autovetores de A e D é uma matriz diagonal cujos elementos da
diagonal principal são os autovalores de A.
47 / 52](https://image.slidesharecdn.com/aula141-250708000430-55a799c5/85/frasede40digitosparamarcaraaaulaqueeunaoligo-52-320.jpg)