Transferir como PDF, PPTX






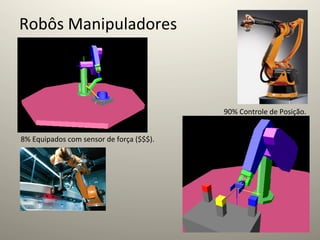


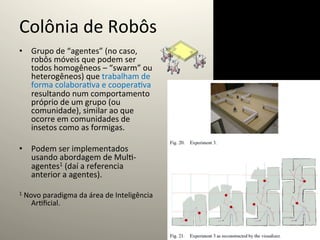
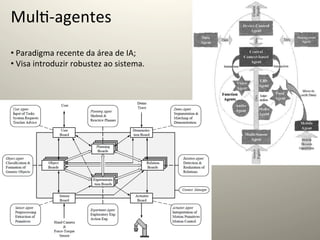
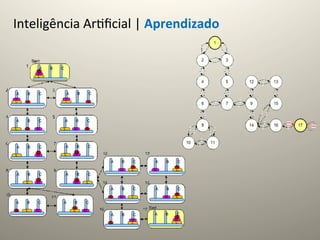
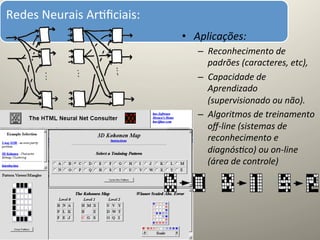
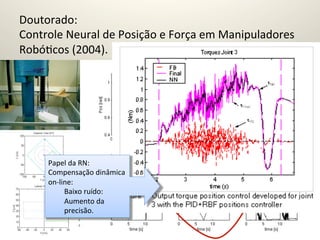






O documento aborda diversas aplicações da robótica e sensoriamento, destacando o uso de robôs em controle automatizado de estoque, coleta remota de amostras, manutenção preventiva, e automação portuária, além de mencionar a agricultura de precisão e sensoriamento remoto. Também discute robôs móveis autônomos e colônias de robôs que cooperam para realizar tarefas. O autor, Prof. Dr. Eng. Fernando Passold, é especialista em robótica com experiência em engenharia elétrica e importantes contribuições em controle e otimização.

























![[José Ahirton Lopes e Rafael Arevalo] Aula 01 - Robótica e IOT](https://cdn.slidesharecdn.com/ss_thumbnails/aula1mbafiap2018roboticaeiot-190123132458-thumbnail.jpg?width=640&height=640&fit=bounds)









































