Transferir como PDF, PPTX


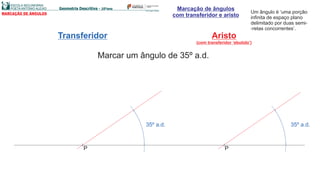

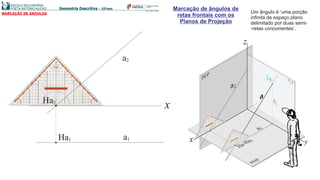
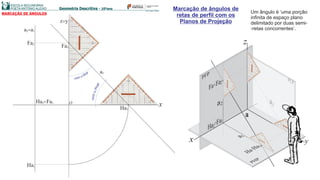

O documento trata da definição e marcação de ângulos usando um transferidor, abordando o conceito de ângulo como uma porção de espaço delimitada por semi-reta. Ele descreve os procedimentos para marcar ângulos de 35 graus em diferentes planos de projeção, incluindo horizontais, frontais e de perfil. A repetição de informações sugere uma ênfase no ensino prático da medição de ângulos.