Baixado 1.101 vezes








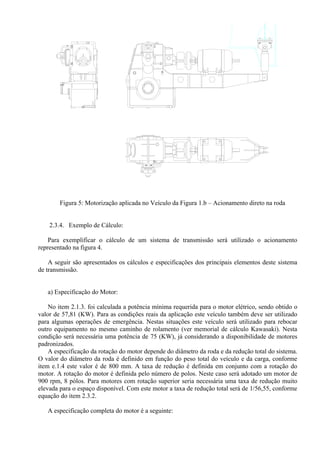





























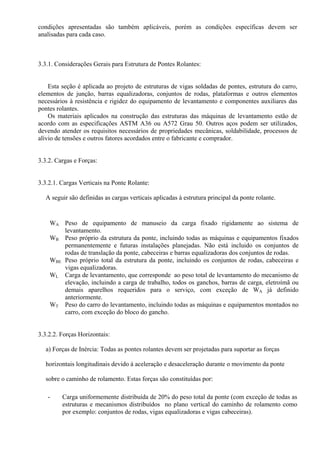
![L3 = 122 (mm)
L = 1742 (mm)
Pt = 2500 (Kgf) – (estimado com base nas dimensões consideradas)
Substituindo os valores obtem-se:
( ) ( ) (Kgf)5319V
2
1742
250012261015043176101504317
1742
1
V 11 =∴⎥
⎦
⎤
⎢
⎣
⎡
×+++×++×=
(Kgf)5815V5319250043172V 22 =∴−+×=
O momento fletor máximo será:
( ) ( ) mm)(Kgf4574340M6102505319LLVM franh21f ×=∴+×=+×=
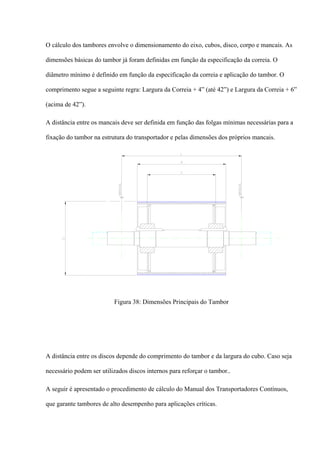
Para o cálculo da tensão de flexão deve ser calculado o módulo de resistência a flexão do
tambor, que é definido por:
( )[ ]
( )
( )[ ]
( )
)(mm6,16907678W
7,1922,103532
2,10357,1922,1035π
h2d32
dh2dπ
W 3
f
44
i
4
i
4
i
f =∴
×+×
−×+×
=
×+×
−×+×
=](https://image.slidesharecdn.com/47634938-apostila-maquinas-de-elevacao-e-transporte-150102082501-conversion-gate02/85/47634938-apostila-maquinas-de-elevacao-e-transporte-64-320.jpg)




















































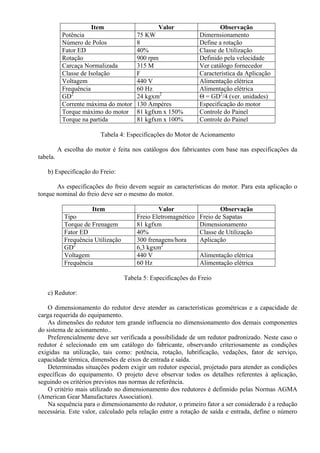
![mm105014003/4 =×
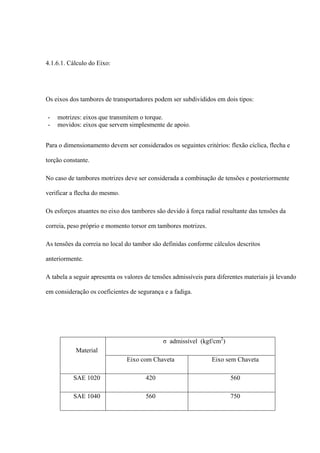
8. Deflexão da Viga:
A AISE 6/91 estabelece uma deflexão vertical máxima de 1/1000 do vão para a carga móvel,
formada pelo carro do levantamento (WT) e carga de trabalho (WL).
A equação da flecha máxima para a condição de carga crítica é obtida na expressão, ver figura
do item 2.2:
( ) ( )[ ]22
x
L bLLbL
IE48
P
D ++×−×
××
=
Substituindo valores temos:
( ) ( )[ ]22
3L 400165016504001650
6480650101,248
1,25
D ++×−×
×××
=
cm333,0DL =
cm65,1D
1000
1650
D fadmfadm =∴=
fadmL DD < OK.
9. Contra-Flecha:
A contra-flecha da viga deve ser igual a soma da flecha do peso próprio (WB) com a metade da
flecha da carga móvel (WL + WT).
A deflexão do peso próprio é:](https://image.slidesharecdn.com/47634938-apostila-maquinas-de-elevacao-e-transporte-150102082501-conversion-gate02/85/47634938-apostila-maquinas-de-elevacao-e-transporte-151-320.jpg)

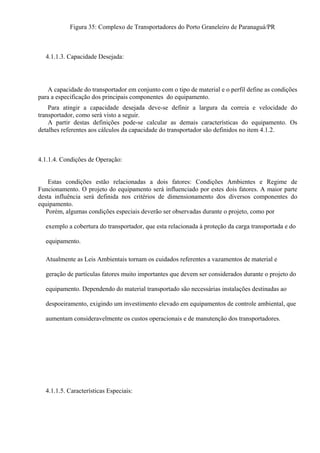








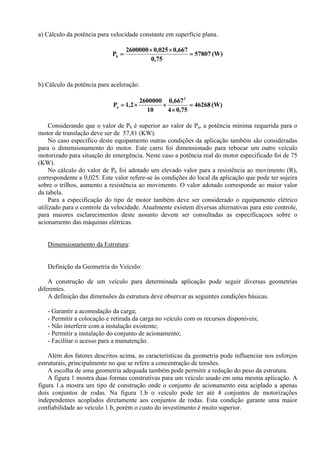
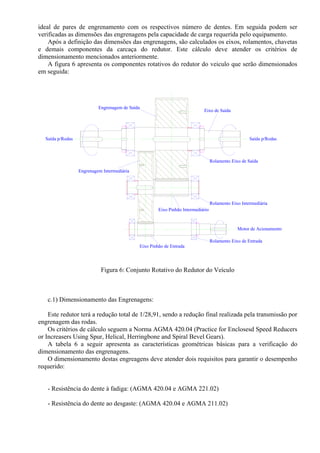
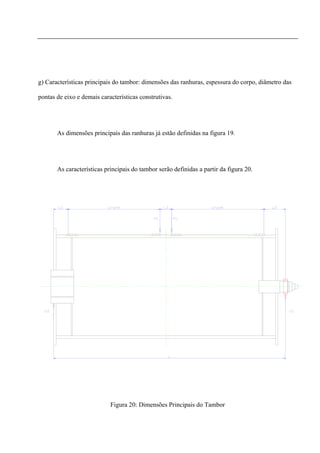
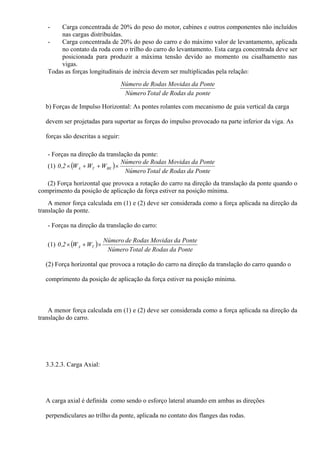
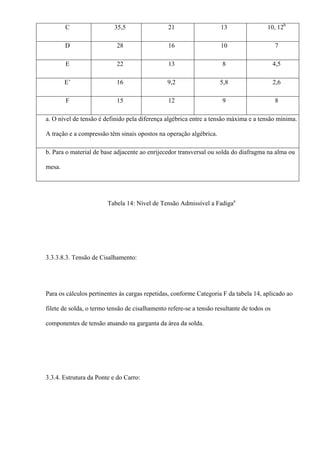
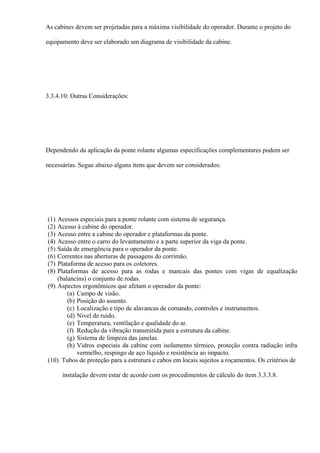
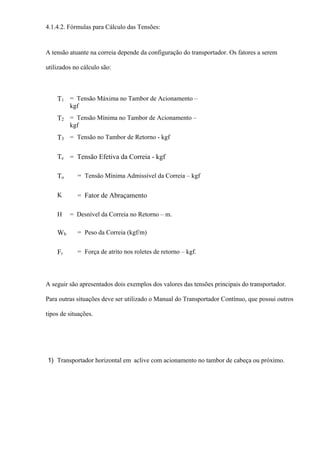
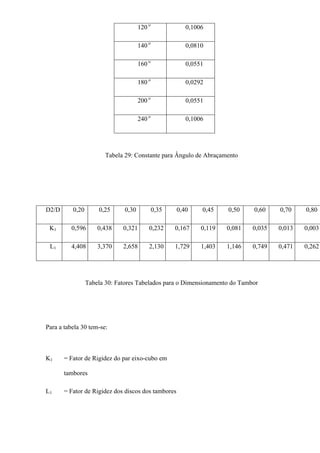
![Este método é aplicado para o cálculo de transportadores de vários lances, curtos e longos.
Neste caso inicialmente é determinada a Tensão Efetiva (Te), pela seguinte expressão:
( )[ ] ambbmyxe TWHW015,0WWKKLT +×±×++×+×=
Sendo:
Te = Tensão Efetiva em (kgf).
L = Comprimento do Transportador Medido ao Longo da Correia (m)
H = Altura de Elevação ou Descida do Material na Correia (m)
Wm = Peso do Material na Correia (kgf/m)
Wb = Peso da Correia (kgf/m) - Tab. 1-27
Kx = Resistência à Rotação dos Roletes e Deslizamento da Correia (kgf/m)
Ky = Resistência à Flexão da Correia e do Material sobre os Roletes
Ta = Tensão de Atrito dos Acessórios e Aceleração do Material (kgf)
Após o cálculo da tensão efetiva Te (kgf) determina-se a potência efetiva em HP, necessária
para o transporte do material, pela equação: (V em m/s)
75
VT
N e
e
×
=
A tensão Ta para vencer o atrito dos acessórios e acelerar o material é a soma das parcelas
indicadas abaixo:
aldtmtctga FFFFFFFT ++++++=](https://image.slidesharecdn.com/47634938-apostila-maquinas-de-elevacao-e-transporte-150102082501-conversion-gate02/85/47634938-apostila-maquinas-de-elevacao-e-transporte-170-320.jpg)




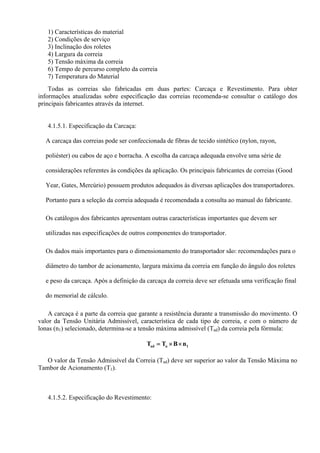













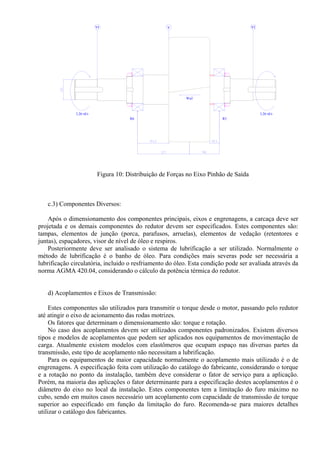
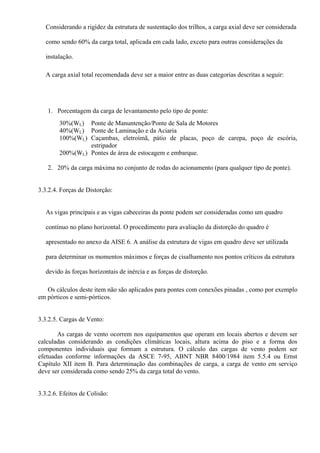
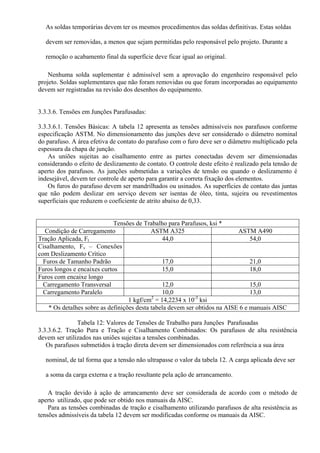
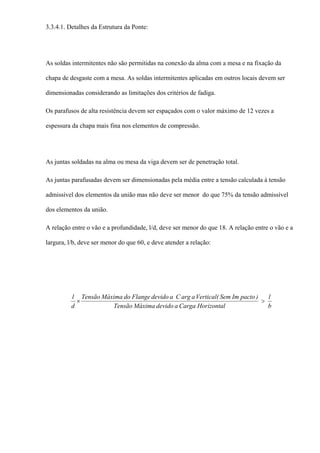
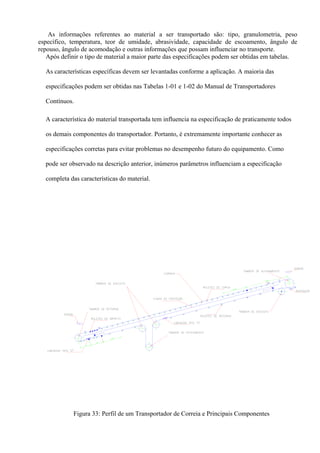
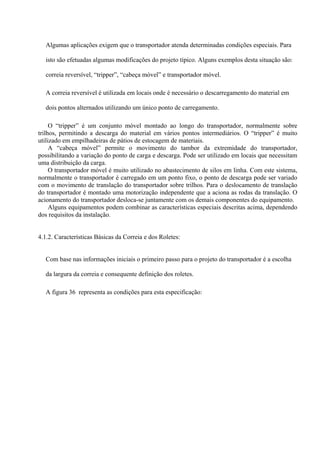
![Ângulo Rolete
Ângulo
Acomodação
Largura da Correia em Polegadas
β α 24 30 36
35 0
23 0
142 232,4 344
Portanto, a correia de 36 polegadas com roletes de 35 graus atende a condição para o menor
valor requerido de Ctabela. Como o valor atende para 3,0 m/s, será utilizada esta velocidade
para o regime normal de funcionamento do transportador (344 > 256,27 – OK).
O espaçamento dos roletes de carga pode ser considerado 1,0 m e retorno 3,0 m (tabela 18). A
escolha e especificação final dos diversos roletes do transportador deve ser feita no catálogo dos
fabricantes com auxílio do Manual dos Transportadores Contínuos.
O valor da flecha será verificado no final dos cálculos.
3) Cálculo da Potência de Acionamento:
Será utilizado o Método CEMA. Neste método inicialmente é calculada a tensão efetiva:
( )[ ] ambbmyxe TWHW015,0WWKKLT +×±×++×+×=
Os valores da equação são os seguintes:](https://image.slidesharecdn.com/47634938-apostila-maquinas-de-elevacao-e-transporte-150102082501-conversion-gate02/85/47634938-apostila-maquinas-de-elevacao-e-transporte-196-320.jpg)











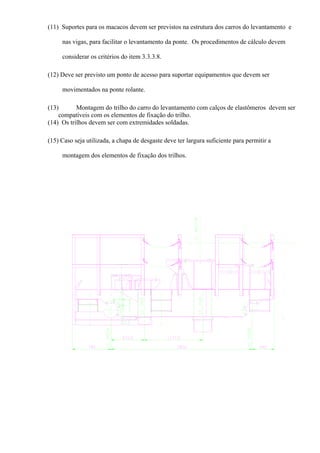
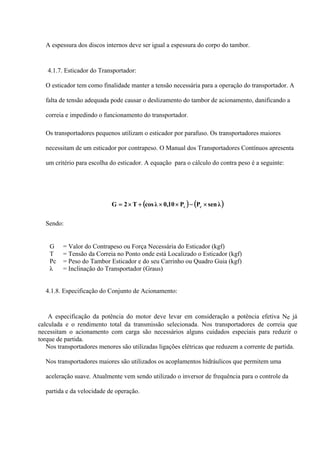
![O valor da massa total do transportador é calculado conforme Manual dos Transportadores
Contínuos e vale 4832,3 (kg.s2
/m).
)kgf(15,974Ff =
O torque de frenagem será:
tamborff RFZ ×=
O valor calculado é de 404,3 (kgf.m), sendo especificado o freio:
Freio Eletro-Hidráulico Tipo FNN 2530, Torque Máximo 6330 (N.m), Torque Mínimo 2820
(N.m). Polia de 630 (mm), EMH ou similar.
9.2) Especificação do Contra-Recuo:
O contra recuo deve ser usado quando:
( )[ ]bbmyxm W015,0WWKK
2
L
WH ×++×+×≥×
Temos que: 1661,4 > 251,25, portanto é necessário o contra recuo.](https://image.slidesharecdn.com/47634938-apostila-maquinas-de-elevacao-e-transporte-150102082501-conversion-gate02/85/47634938-apostila-maquinas-de-elevacao-e-transporte-208-320.jpg)
![O torque do contra recuo é definido na expressão:
( )[ ]
⎩
⎨
⎧
⎭
⎬
⎫
×++×+×−××= bbmyxmtamborc W015,0WWKK
2
L
WHRZ
O valor calculado é: Zc = 585 (kgf.m). A especificação do contra recuo é:
Freio contra-recuo tipo HD-4A, Eixo 150 mm, 70 rpm, torque de serviço 585 (kgf.m), da marca
FAÇO Stephens Adamson ou Similar.
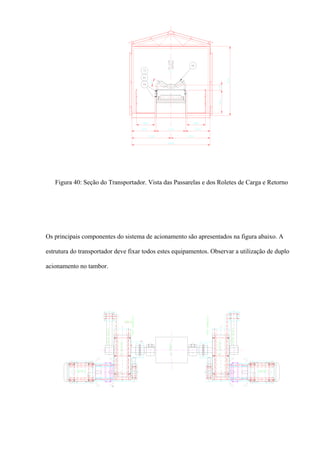
10) Projeto da Estrutura do Transportador:
A seguir são apresentados alguns detalhes do projeto da estrutura do transportador.
A figura abaixo mostra um detalhe da estrutura do transportador em forma de galeria. Pode ser
observada as duas passarelas laterais, os roletes de carga, roletes de retorno e a seção da estrutura
com cobertura total.](https://image.slidesharecdn.com/47634938-apostila-maquinas-de-elevacao-e-transporte-150102082501-conversion-gate02/85/47634938-apostila-maquinas-de-elevacao-e-transporte-209-320.jpg)




(1) O documento apresenta as considerações iniciais para o projeto de veículos de transporte motorizados, máquinas de elevação e transportadores contínuos. (2) Inclui um exemplo de cálculo para um carro de transferência de aço líquido com capacidade de 200 toneladas. (3) Discorre sobre a determinação da potência de translação, dimensionamento da estrutura e projeto do sistema de acionamento.