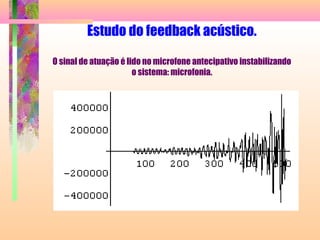
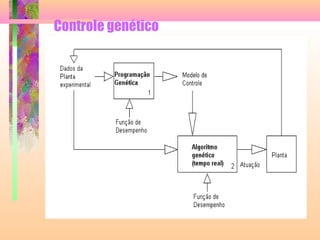
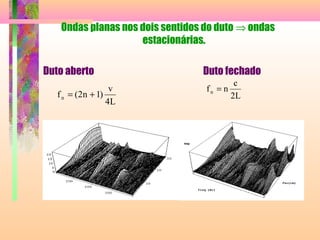
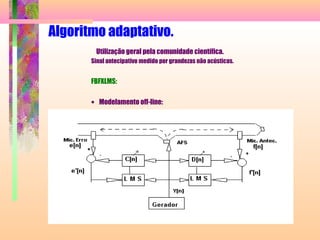
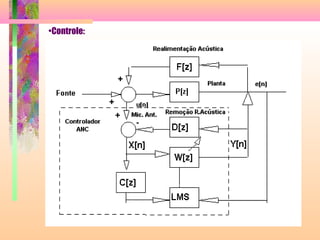
O documento discute o uso de algoritmos genéticos para o controle ativo de ruído em dutos, propondo o "Controle Genético" que usa programação genética para identificar o modelo da planta e do controlador e algoritmo genético para controle em tempo real, permitindo acompanhar variações da planta sem necessitar de identificação. Resultados experimentais mostraram redução significativa do ruído em diferentes frequências e bandas.


![Obtenção da função de transferência da planta.
Excitações:
• Impulso.
• Ruído
aleatório.
• Varredura em
freqüência.
• Impacto.
−ΘΘ+
−
−Θ+
−
−Θ+
=
)
c
Ls
exp()s()s(]
c
Ls
exp[
)
c
)z1(Ls
exp()s(]
c
)z1(Ls
exp[*)
c
Lsa
exp()s(]
c
Lsa
exp[
2
1
)s,a,z(H
10
10](https://image.slidesharecdn.com/44683271-fe27-4b19-a511-9f874052f2f2-151009184345-lva1-app6892/85/199908T_Defesa-9-320.jpg)
![Modelo matemático do sistema acústico.
Equação de Helmholtz para o duto:
pc
t
p 22
2
2
∇=
∂
∂
Posição
Tempo
Intensidade
[ ])c/zitiexp(b)c/zitiexp(a)y,x(
)t(T)z(Z)y,x()t(T)z(Z)y(Y)x(X)t,z,y,x(p
mnmnmn
mn
ω+ω+ω−ωψ
=ψ==](https://image.slidesharecdn.com/44683271-fe27-4b19-a511-9f874052f2f2-151009184345-lva1-app6892/85/199908T_Defesa-10-320.jpg)




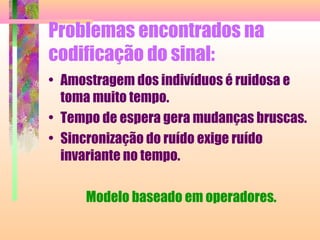
![Modelo de atraso / ganho conhecido o ruído
• Y[n] = G e R[ n - τ]
• Evolução:](https://image.slidesharecdn.com/44683271-fe27-4b19-a511-9f874052f2f2-151009184345-lva1-app6892/85/199908T_Defesa-38-320.jpg)