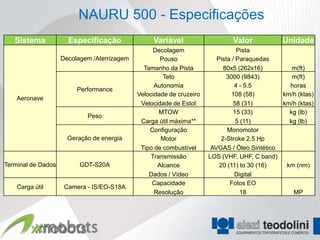
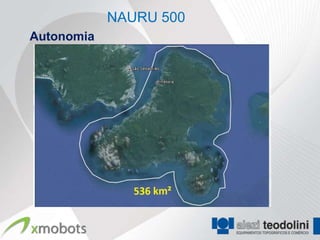
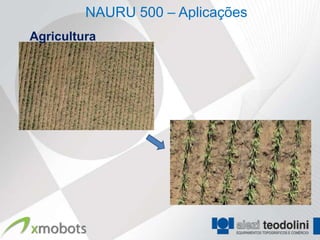
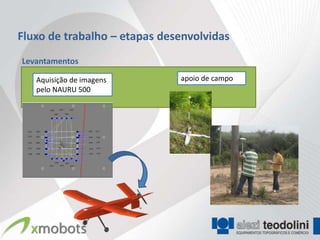
O documento descreve o sistema de veículo aéreo não tripulado Nauru 500, incluindo suas especificações, capacidades, métodos de voo e aplicações. O sistema consiste em um VANT de pequeno porte com autonomia de 4-5,5 horas, câmera de 18 megapixels e capacidade de transmitir dados e vídeo em tempo real. Pode operar de forma autônoma ou semiautônoma em diferentes configurações.