Baixado 28 vezes




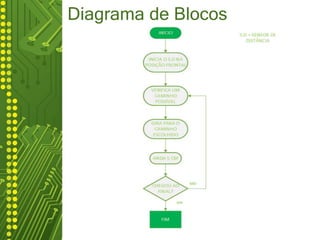



Este documento propõe a construção de um robô autônomo capaz de explorar um labirinto sem demarcações. O robô usará sensores ultrassônicos e seguidores de linha para navegar pelo labirinto e alcançar um ponto final determinado, sem ajuda humana. Ele será construído com placas Arduino e outros componentes eletrônicos e mecânicos reciclados.













































