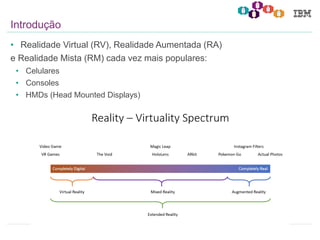
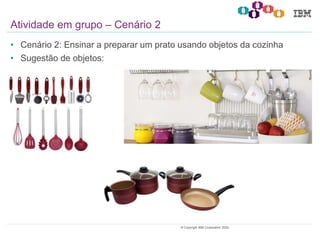
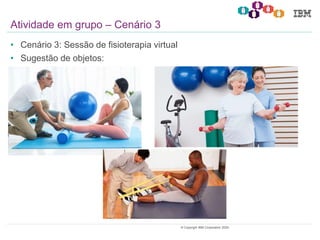
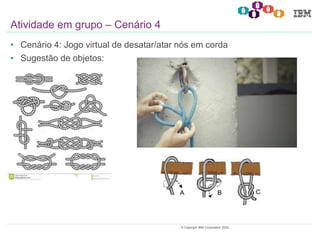
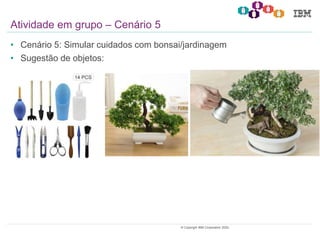
O documento apresenta as principais técnicas de rastreamento de objetos em realidade virtual, aumentada e mista, incluindo visão computacional, sensores e instrumentação. Foi realizada uma atividade em grupo para idear aplicações usando esses métodos em cinco cenários diferentes.