1. O documento apresenta um estudo sobre programação em linguagem Assembly para microcontroladores AVR usando o Atmel Studio. São mostrados algoritmos e programas em Assembly para realizar operações matemáticas básicas como soma, decremento e comparações.
2. São apresentadas instruções Assembly como LDI, ADD, DEC, BRNE e outras. Também são explicados conceitos como flags, registradores e pilha.
3. São fornecidos exemplos de código Assembly com passo a passo de simulação para verificar o funcionamento dos algoritmos propostos.

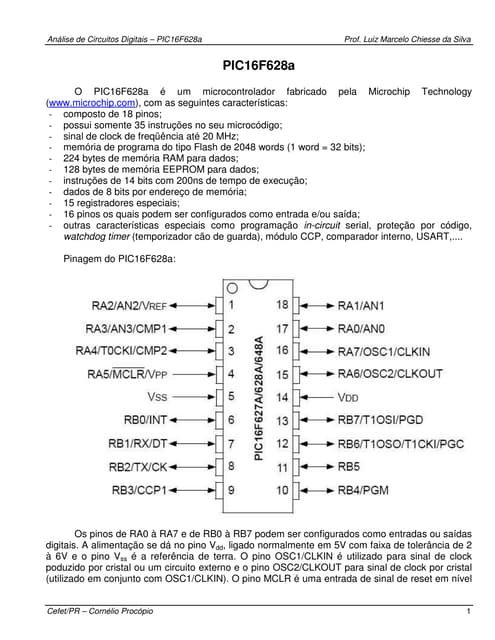
![2. Programa que decrementa o conteúdo de um registrador
Algoritmo 2
1 Carregue R16 com o valor 4
2 Decremente o conteúdo de R16
3 Decremente o conteúdo de R16
4 Decremente o conteúdo de R16
5 Decremente o conteúdo de R16
6 Decremente o conteúdo de R16
7 Fim do programa
O ponto principal do Algoritmo 2 é a instrução de Decremento – “DEC – Decrement” que na
linguagem Assembly AVR tem o mnemônico: DEC Rd e realiza a operação: Rd ← Rd -1
2.a. Escreva em Assembly o programa o programa descrito no Algoritmo 2
2.b. Qual será o valor do conteúdo do registrador R16 ao final da execução de cada linha, 1, 2,
3, ...,6?
Os Microcontroladores AVR, assim como todos os demais microprocessadores e
Microcontroladores, tem circuitos associados à ALU cuja finalidade é a de monitorar ou sinalizar
certos acontecimentos – os “Flags” -. O “Zero Flag” (Z) ou “Sinalizador de Zero” é ligado quando
uma operação na ALU resultou em Zero ou desligado, caso contrário; O “Carry Flag” (C) ou
“Sinalizador de Carry/Transporte” é alterado quando ocorre um transporte do bit 7 fazendo o
papel de um “suposto bit 8”. Nos Microcontroladores AVR os “Flags” estão contidos em um
registrador especial denominado “Status Register”.
2.c. Consulte a seção 7.3 da do Data Sheet Atmega328P [4] e esquematize os oitos bits do
“Status Register”
2.d. Abra o Atmel Studio, crie um projeto Assembly para o Microcontrolador Atmega328P e
simule passo a passo Programa 2. Verifique o conteúdo do R16 bem como do “Zero Flag” (Z) à
medida em que a simulação avança. Observe que (Z) muda para a cor vermelha quando é ligado.
Programa 2
L LABEL INSTR. OPERANDOS COMENTÁRIOS
1 R16 ← 4
2 R16 ← R16-1
3
4
5
6
7 FIM: RJMP FIM](https://image.slidesharecdn.com/pbl-assemblyavrcomoatmega328p-rev-161017164235/85/Pbl-assembly-avr-como-atmega328-p-rev-1-3-320.jpg)




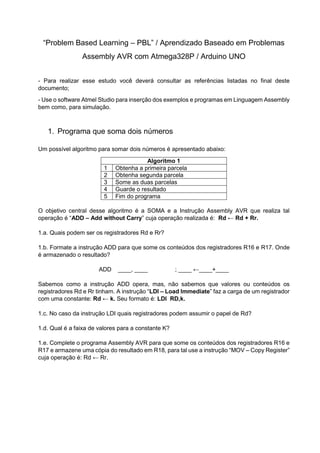
![5. O “Stack” ou Pilha
5.a. No data Sheet do Atmega328P, seção 7.5 há uma breve explicação sobre o “Stack” ou Pilha.
Se preciso for, use o “google translate” para lê-la. A Pilha é implementada em uma área de
memória RAM interna. O nome pilha refere-se à analogia que se faz com pilhas de objetos
(caixas, livros, etc.) na qual o último item inserido ocupa sempre o Topo da Pilha e o item a ser
retirado da pilha é sempre o do Topo. Pede-se:- Liste as instruções que usam o a Pilha.
5.b As operações elementares realizadas na Pilha são: Empilhar ou inserir dados na pilha (“data
is pushed onto the Stack”); e Desempilhar ou retirar dados da pilha (“data is popped from the
Stack”) Consulte no data Sheet do Conjunto de Instruções as instruções das seções 90 e 89.
Instrução para Empilhar Instrução para Desempilhar
Instrução: Instrução:
Insere dado no Topo da Pilha [SP] ← rd Atualiza o Topo da Pilha SP ← SP+1
Atualiza o Topo da Pilha SP ← SP-1 Retira dado do Topo da Pilha rd ← [SP]
5.c (RESOLVIDO) O registrado SP (“Stack Pointer” ou Apontador/Ponteiro da Pilha) deve ser
carregado com um endereço de memória RAM (normalmente usa-se RAMEND, que significa o
último endereço da memória RAM). Suponha que SP = 0x08FF; R16 = 0x01; R17=0x24;
R18=0xA9. O prefixo “0x” especifica base 16 ou hexadecimal. Esquematize a Pilha ao final da
execução das instruções: PUSH R16, PUSH R17, PUSH R18.
0x08FB ?? 0x08FB ?? 0x08FB ?? SP→ 0x08FB ??
0x08FC ?? 0x08FC ?? SP→ 0x08FC ?? 0x08FC A9
0x08FD ?? SP→ 0x08FD ?? 0x08FD 24 0x08FD 24
SP→ 0x08FF ?? 0x08FF 01 0x08FF 01 0x08FF 01
5.e. Nas seções 91 e 92 são apresentadas as instruções RCALL e RET. A primeira é usada para
Chamar uma Sub-rotina e a segunda para retornar dela. A instrução RCALL empilha o endereço
de retorno (o endereço da próxima instrução) e realiza o equivalente a um Salto/Jump para o
endereço da Sub-rotina. A instrução RET faz o inverso, desempilha o endereço de retorno e faz
um Salto/Jump para tal endereço. Esquematize a pilha (de forma semelhante à do item 5.d) para
demonstrar o que acontece quando o trecho de programa abaixo e executado. Considere
SP=0x08FF; R16 = 0x42
Programa 5
ENDEREÇO LABEL INSTRUÇÃO OPERANDOS COMENTÁRIO
0005 LOOP: PUSH R16
0006 RCALL FUNC_1 ; (1)
0008 POP R16
RJMP LOOP
0123 FUNC_1: NOP
0124 RCALL FUNC_2 ; (2)
0126 RET
0137 FUNC_2: NOP
0138 RET](https://image.slidesharecdn.com/pbl-assemblyavrcomoatmega328p-rev-161017164235/85/Pbl-assembly-avr-como-atmega328-p-rev-1-8-320.jpg)
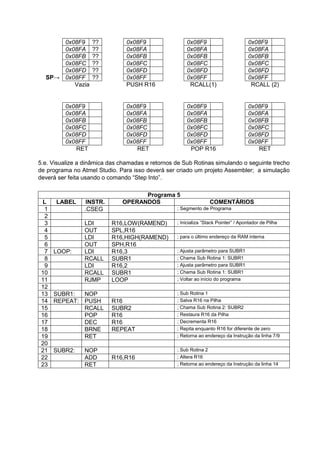
![6. Temporização ou “Delay” por Software
Cada Instrução AVR Assembly requer uma quantidade de Ciclos de Clock (oscilador de onda
quadrada usado para sincronizar as operações dos circuitos digitais) para ser buscada
decodificada e executada.
No Sistema Alvo (Arduino UNO) a frequência do Clock é de 16 MHz (16x106
Hz):
fosc = 16 MHz
6.a. Consulte o documento – “Atmel AVR 8-bit Instruction Set” e tome nota de quantos Ciclos
(Cycles ou Cy) cada uma das instruções listadas abaixo requer. Algumas tem seus Ciclos
variáveis em função de ocorrer ou não um desvio condicional; outras apresentam notas que
podem modificar a contagem desses Ciclos. NOP, LDI, DEC, MOV, ADD, RJMP, RCALL, RET,
BRNE, BRE, SBI, CBI, SBIS, SBIC.
A unidade básica de temporização é o Cy :
𝐶𝑦 =
1
𝑓𝑜𝑠𝑐
O “delay” (d) é conseguido repetindo-se um Cy por n vezes:
𝑑 = 𝑛 . 𝐶 𝑦
6.b. Quantos Cy são necessários para se temporizar 1 ms (0,001 s ou 1x10-3
s)? Um registrador
tem 8 bits: 28
=256.
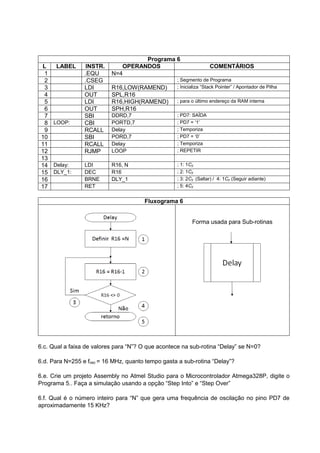
No Programa e Fluxograma 6, é apresentada uma técnica para aumentar o número de Ciclos
sem que para isso seja necessário aumentar a quantidade de instruções. Nas linhas 14 a 17,
está um trecho de programa que realiza uma temporização em função do valor de “N”. O valor
de “N” é definido na linha 1 pela diretiva ou Pseudo Instrução .EQU. Na seção de comentários
das linhas 14 a 17 está a correlação entre cada linha deste trecho com os blocos do Fluxograma
5. O cálculo de tempo gasto pela sub-rotina “Delay” é feito da seguinte forma:
Delay = 1.Cy + (N . Cy) + [(N-1). 2.Cy] + (1.Cy) + 4. Cy
Delay = 1.Cy + N.Cy + 2.N.Cy – 2.Cy + 1.Cy + 4.Cy
Delay = 4.Cy + 3.N.Cy
Delay = (4+3.N).Cy
Delay = (4+3.N).1/fosc](https://image.slidesharecdn.com/pbl-assemblyavrcomoatmega328p-rev-161017164235/85/Pbl-assembly-avr-como-atmega328-p-rev-1-10-320.jpg)